TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024131918
公報種別
公開特許公報(A)
公開日
2024-09-30
出願番号
2023042492
出願日
2023-03-17
発明の名称
運転支援装置
出願人
株式会社SOKEN
,
株式会社デンソー
代理人
弁理士法人明成国際特許事務所
主分類
B60W
30/12 20200101AFI20240920BHJP(車両一般)
要約
【課題】走路形状をより正確に認識する技術を提供する。
【解決手段】運転支援装置200は、道路の区画線を示す区画線情報と、先行車の移動軌跡を示す先行車情報と、自車両の走行レーンが消失するエリアである走行レーン消失エリアとを認識する認識部210と、区画線情報と先行車情報のそれぞれについて、自車両の走路形状の算出に使用可能か否かを判定する使用可否判定部220と、使用可否判定部の判定結果を用いて走路形状を算出する走路形状算出部230と、を備える。使用可否判定部は、走行レーン消失エリア以外の走行レーンエリアと、走行レーン消失エリアとで、先行車情報の使用可否の判定方法を切り替える。
【選択図】図1
特許請求の範囲
【請求項1】
自車両の運転を支援する運転支援装置(200)であって、
道路の区画線を示す区画線情報と、先行車の移動軌跡を示す先行車情報と、前記自車両の走行レーンが消失するエリアである走行レーン消失エリアとを認識する認識部(210)と、
前記区画線情報と前記先行車情報のそれぞれについて、前記自車両の走路形状の算出に使用可能か否かを判定する使用可否判定部(220)と、
前記使用可否判定部の判定結果を用いて前記走路形状を算出する走路形状算出部(230)と、
を備え、
前記使用可否判定部は、前記走行レーン消失エリア以外の走行レーンエリアと、前記走行レーン消失エリアとで、前記先行車情報の使用可否の判定方法を切り替える、運転支援装置。
続きを表示(約 1,000 文字)
【請求項2】
請求項1に記載の運転支援装置であって、
前記使用可否判定部は、
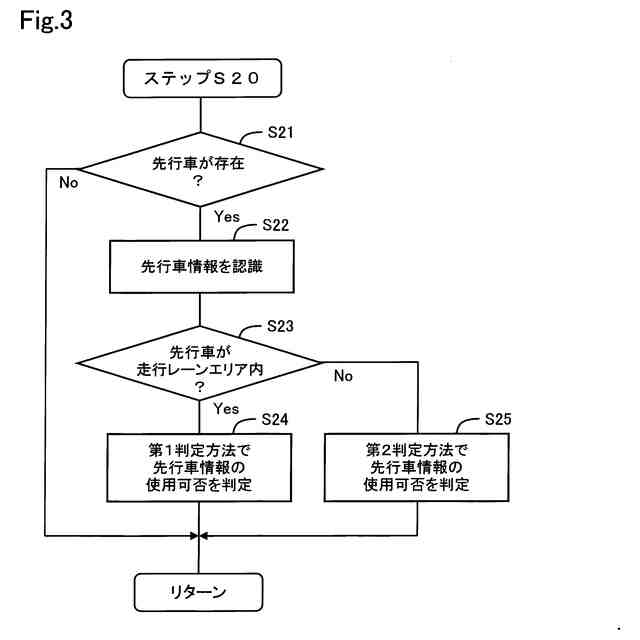
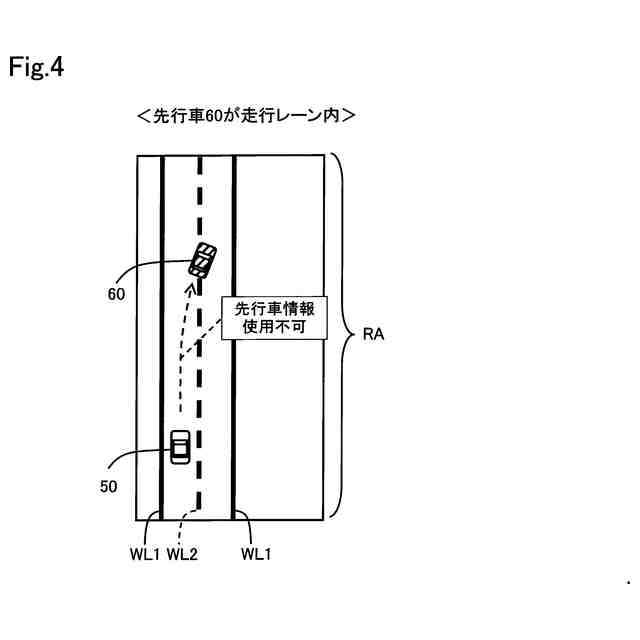
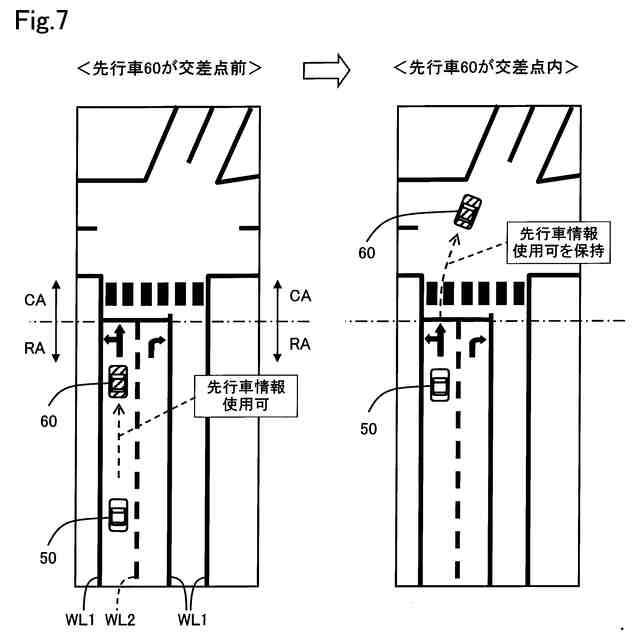
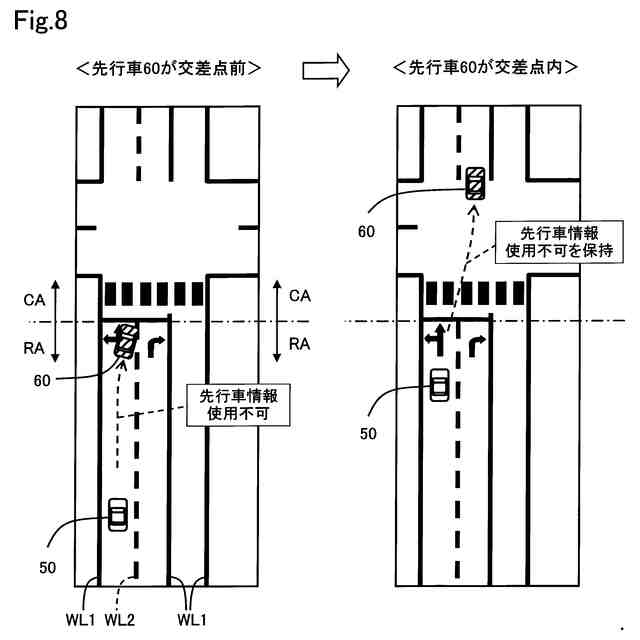
(i)前記先行車が前記走行レーンエリアに存在する場合には、前記先行車の前記移動軌跡と前記区間線との間の幅員方向の位置関係を用いて、前記先行車情報の使用可否を判定し、
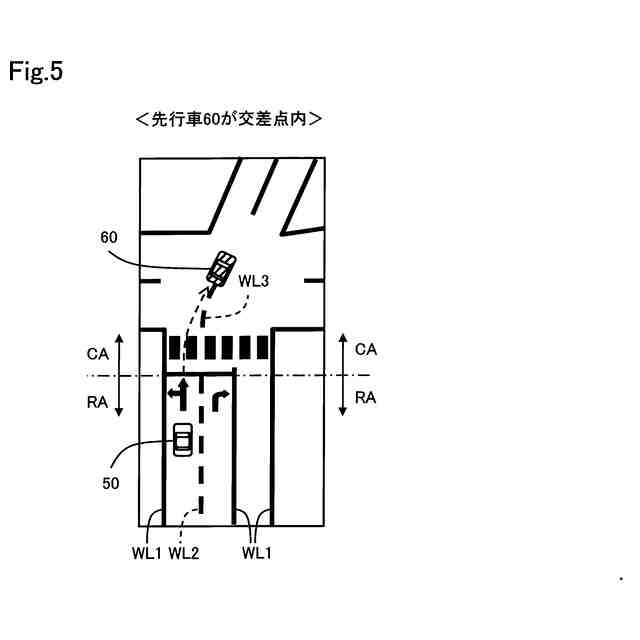
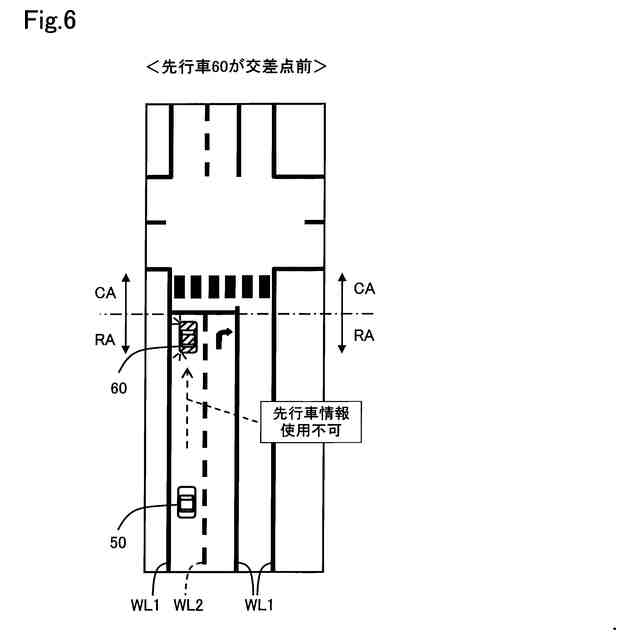
(ii)前記先行車が前記走行レーン消失エリアに存在する場合には、前記先行車が前記走行レーン消失エリアに進入する前の前記走行レーンエリアに存在していた時における前記先行車情報の使用可否の判定結果を保持する、運転支援装置。
【請求項3】
請求項2に記載の運転支援装置であって、
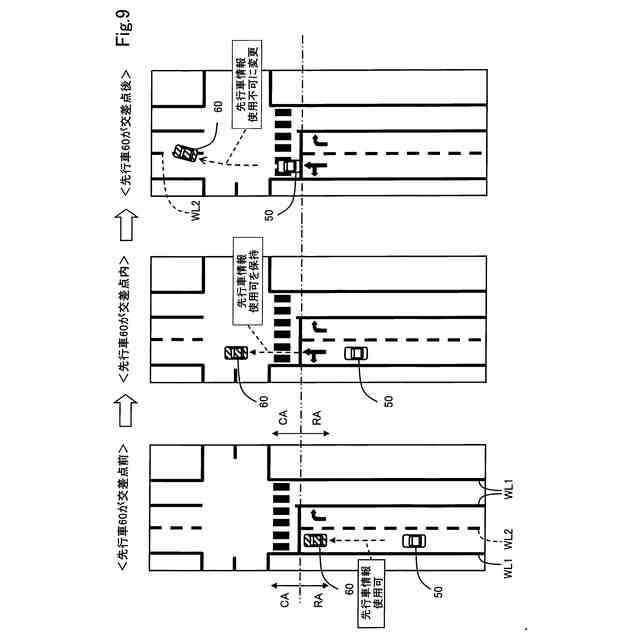
前記使用可否判定部は、前記先行車情報を使用可能という判定結果を保持している場合において、予め定められた更新条件が成立する場合には、保持していた前記判定結果を破棄して前記先行車情報の使用可否の判定結果を更新する、運転支援装置。
【請求項4】
請求項3に記載の運転支援装置であって、
前記更新条件は、前記先行車が前記走行レーン消失エリアから脱出したことを含む、運転支援装置。
【請求項5】
請求項3に記載の運転支援装置であって、
前記更新条件は、前記先行車の前記移動軌跡が予め定められた変化率閾値よりも大きな変化率で変化したことを含む、運転支援装置。
【請求項6】
請求項3に記載の運転支援装置であって、
前記更新条件は、前記先行車のウィンカーの点滅が検知されたことを含む、運転支援装置。
【請求項7】
請求項3に記載の運転支援装置であって、
前記更新条件は、前記先行車が前記走行レーン消失エリアにある前記区画線を跨ぐように進行したことを含む、運転支援装置。
【請求項8】
請求項1に記載の運転支援装置であって、更に、
前記算出された走路形状に応じて、前記自車両を制御するための制御指令値を生成する制御指令作成部(240)を備え、
前記走路形状算出部が前記先行車情報を用いて前記走路形状を算出する場合において、前記先行車が前記走行レーン消失エリアに存在している場合には、前記先行車が前記走行レーンエリアに存在する場合に比べて、前記制御指令作成部が前記制御指令値の変化率を小さくする、運転支援装置。
発明の詳細な説明
【技術分野】
【0001】
本開示は、自車両の運転を支援する運転支援装置に関する。
続きを表示(約 2,300 文字)
【背景技術】
【0002】
特許文献1には、区画線の認識結果に基づいて自車両の車線維持を行う第1制御と、先行車の追従を行う第2制御と、を切り替えて実行する走行制御装置が開示されている。この走行制御装置では、交差点において、区画線の認識結果に基づく車線維持から、先行車の追従に切り替えることによって、自車両のふらつきを防止することができる。
【先行技術文献】
【特許文献】
【0003】
特許第7109496号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、従来技術では、先行車が車線変更している場合などにおいて、先行車の移動軌跡に従って走路形状を算出すると走路形状を誤認識してしまう場合があった。このため、自車両の走路形状をより正確に認識できる技術が望まれている。
【課題を解決するための手段】
【0005】
本開示の一形態によれば、自車両の運転を支援する運転支援装置(200)が提供される。この運転支援装置は、道路の区画線を示す区画線情報と、先行車の移動軌跡を示す先行車情報と、前記自車両の走行レーンが消失するエリアである走行レーン消失エリアとを認識する認識部(210)と、前記区画線情報と前記先行車情報のそれぞれについて、前記自車両の走路形状の算出に使用可能か否かを判定する使用可否判定部(220)と、前記使用可否判定部の判定結果を用いて前記走路形状を算出する走路形状算出部(230)と、を備え、前記使用可否判定部は、前記走行レーン消失エリア以外の走行レーンエリアと、前記走行レーン消失エリアとで、前記先行車情報の使用可否の判定方法を切り替える。
【0006】
この運転支援装置によれば、交差点エリアや料金所エリア等の走行レーン消失エリアと、それ以外の走行レーンエリアとで、先行車情報の使用可否の判定方法を切り替えるので、シーンに応じて先行車情報の使用可否を適切に判定することができ、走路形状の認識率の向上と誤認識の抑制を両立できる。
【図面の簡単な説明】
【0007】
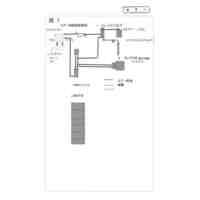
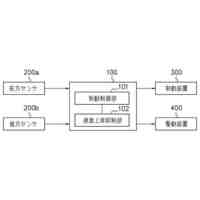
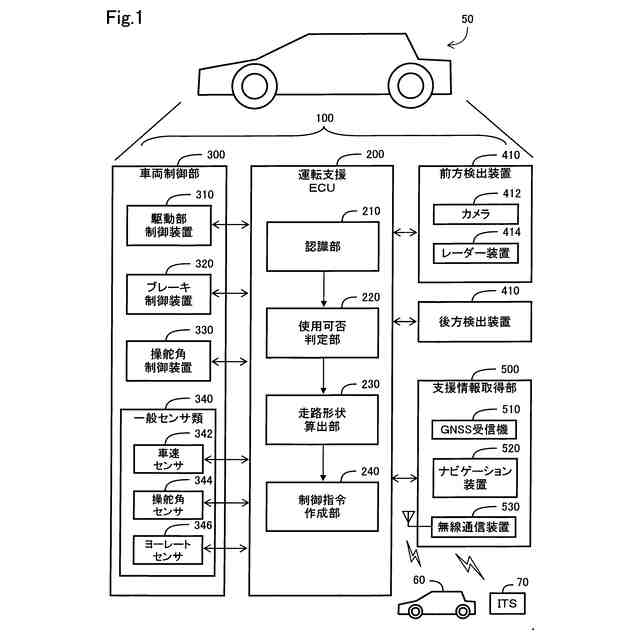
実施形態としての車両制御システムの構成を示すブロック図。
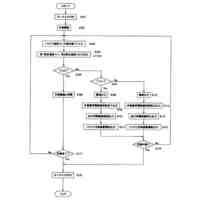
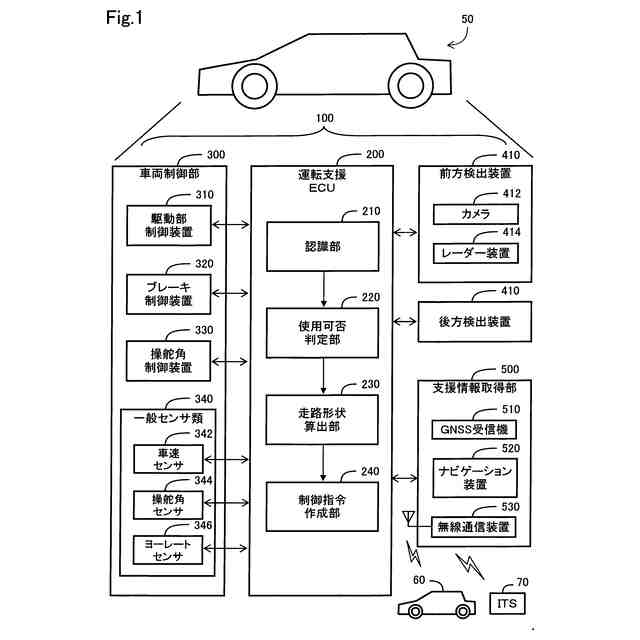
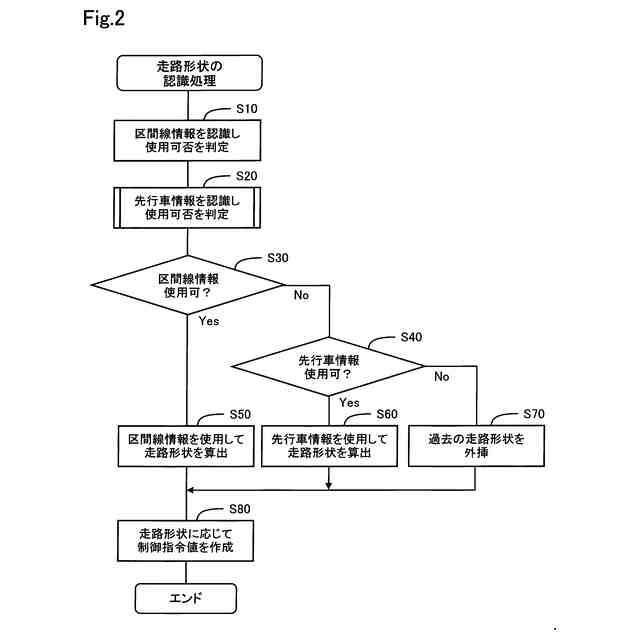
走路形状の認識処理の手順を示すフローチャート。
ステップS20の詳細手順を示すフローチャート。
先行車情報の使用可否判定の第1実施例を示す説明図。
先行車情報の使用可否判定の第2実施例を示す説明図。
先行車情報の使用可否判定の第3実施例を示す説明図。
先行車情報の使用可否判定の第4実施例を示す説明図。
先行車情報の使用可否判定の第5実施例を示す説明図。
先行車情報の使用可否判定の第6実施例を示す説明図。
先行車情報の使用可否判定の第7実施例を示す説明図。
【発明を実施するための形態】
【0008】
図1に示すように、一実施形態の車両50は、車両制御システム100を備える。車両制御システム100は、運転支援ECU200と、車両制御部300と、前方検出装置410と、後方検出装置420と、支援情報取得部500と、を備える。本明細書において、車両50を「自車両50」とも呼ぶ。運転支援ECU200は、自動運転を行うための自動運転ECUとして構成されていてもよい。
【0009】
車両制御部300は、駆動部制御装置310と、ブレーキ制御装置320と、操舵角制御装置330と、一般センサ類340とを含む。駆動部制御装置310は、車両50の車輪を駆動する駆動部(図示せず)を制御する機能を有する。車輪の駆動部としては、内燃機関と電動モータのうちの1つ以上の原動機を使用可能である。ブレーキ制御装置320は、車両50のブレーキ制御を実行する。ブレーキ制御装置320は、例えば電子制御ブレーキシステム(ECB)として構成される。操舵角制御装置330は、車両50の車輪の操舵角を制御する。「操舵角」とは、車両50の2つの前輪の平均操舵角を意味する。操舵角制御装置330は、例えば電動パワーステアリングシステム(EPS)として構成される。一般センサ類340は、車速センサ342と操舵角センサ344とヨーレートセンサ346を含んでおり、車両50の運転に必要とされる一般的なセンサ類である。一般センサ類340は、自動運転と手動運転のいずれの場合にも利用されるセンサを含んでいる。
【0010】
前方検出装置410は、車載センサを使用して、自車両50の前方に存在する物体や道路設備(車線、交差点、信号機等)等の各種の対象物に関する情報を取得する。本実施形態において、前方検出装置410は、カメラ412と、レーダー414とを含んでいる。カメラ412としては、単眼カメラや、ステレオカメラを使用可能である。また、カメラ412は、対象物の色(例えば白線の走路区画線と黄線の走路区画線)を区別するために、カラーカメラであることが好ましい。レーダー414としては、光を放射するLIDAR(Light Detection and Ranging)や、電波を放射するレーダー(例えばミリ波レーダー)など、電磁波を放射する各種のレーダーを使用可能である。後方検出装置420は、自車両50の後方に存在する物体や道路設備等の各種の対象物に関する情報を取得する。後方検出装置420も、前方検出装置410と同様な車載センサを含むように構成可能である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
車両用エアー傘
2か月前
個人
電池交換式自動車
1か月前
個人
自動車盗難防止装置
2か月前
個人
車内雨傘載置収納具
4か月前
個人
荷台雨除け装置
3か月前
個人
キャンピングトレーラー
3か月前
日本精機株式会社
運転支援装置
28日前
株式会社豊田自動織機
電動車両
3か月前
個人
移動手段のミラーカバー。
2か月前
個人
全自動解除式シートベルト
3か月前
日本精機株式会社
表示システム
29日前
日本精機株式会社
表示システム
4か月前
個人
連結式、キャンピングカー
1か月前
東レ株式会社
車両用エアバッグ
11日前
個人
車両の座席装置
2か月前
トヨタ自動車株式会社
車両
4か月前
トヨタ自動車株式会社
車両
4か月前
トヨタ自動車株式会社
車両
4か月前
井関農機株式会社
作業車両
3か月前
井関農機株式会社
作業車両
3か月前
井関農機株式会社
作業車両
3か月前
井関農機株式会社
作業車両
3か月前
株式会社コーワ
フィルター清掃装置
3か月前
エムケー精工株式会社
車両処理装置
1日前
個人
視認ペダル操作システム
3か月前
スズキ株式会社
車両制御装置
1か月前
個人
テーブル付きハンドルガード具
3か月前
アピオ株式会社
荷物用支持具
2か月前
豊田合成株式会社
車両
11日前
ダイハツ工業株式会社
レバー
1か月前
豊田合成株式会社
車両
11日前
個人
セパレート型キャンピングカー
2か月前
日本化薬株式会社
ガス発生器
2か月前
株式会社コーワ
フィルター清掃装置
3か月前
個人
ブレーキ踏み間違い救済システム
11日前
豊田合成株式会社
乗員保護装置
7日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ