TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024128784
公報種別
公開特許公報(A)
公開日
2024-09-24
出願番号
2023037986
出願日
2023-03-10
発明の名称
車両制御装置、車両制御用コンピュータプログラム及び車両制御方法
出願人
トヨタ自動車株式会社
代理人
個人
,
個人
,
個人
,
個人
,
個人
,
個人
,
個人
主分類
B60W
40/04 20060101AFI20240913BHJP(車両一般)
要約
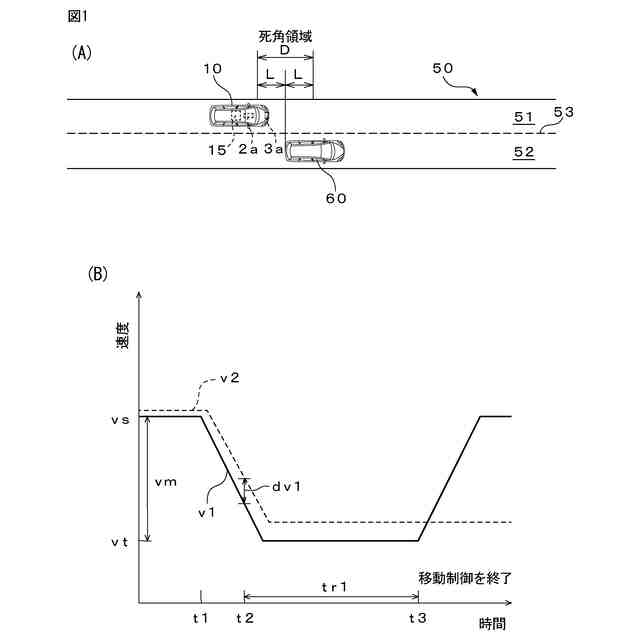
【課題】自車両を他車両の死角領域の外へ移動する移動制御を行っているにも関わらず自車両が死角領域に位置し続ける場合、移動制御を終了する車両制御装置を提供する。
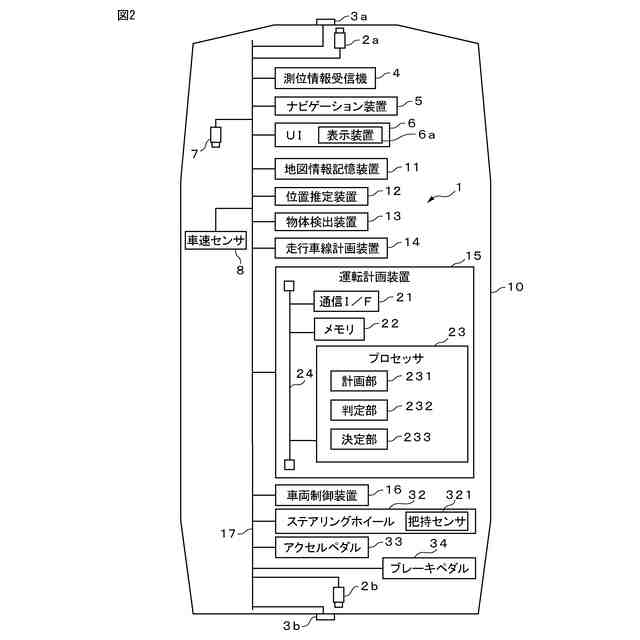
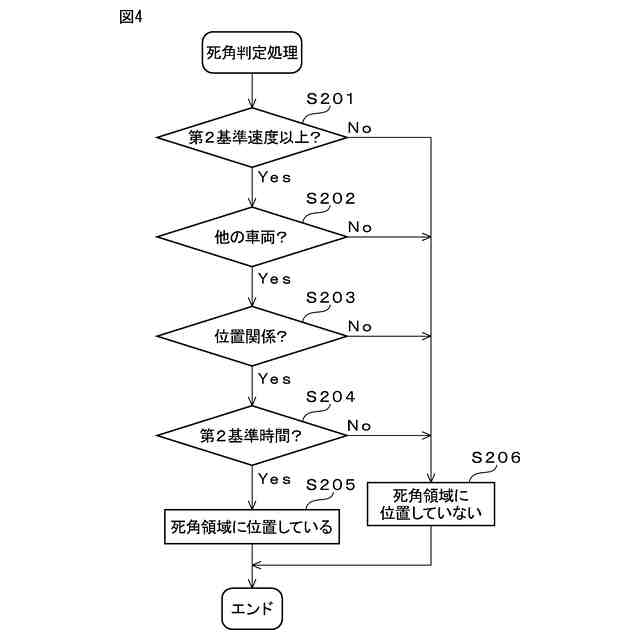
【解決手段】車両制御装置は、自車両が他車両の死角領域に位置しているか否かを判定する第1判定部と、自車両が他車両の死角領域に位置していると判定された場合、自車両の速度を変化させることにより自車両を他車両の死角領域の外へ移動させる移動制御を開始することを決定する第1決定部と、移動制御の実行中に、自車両と他車両との相対速度の絶対値が所定の基準速度以下の状態が所定の基準時間続いたか否かを判定する第2判定部と、自車両と他車両との相対速度の絶対値が基準速度以下の状態が基準時間続いたと判定された場合、移動制御を終了することを決定する第2決定部と、を有する。
【選択図】図2
特許請求の範囲
【請求項1】
自車両の周辺環境を表す情報に基づいて、自車両が他車両の死角領域に位置しているか否かを判定する第1判定部と、
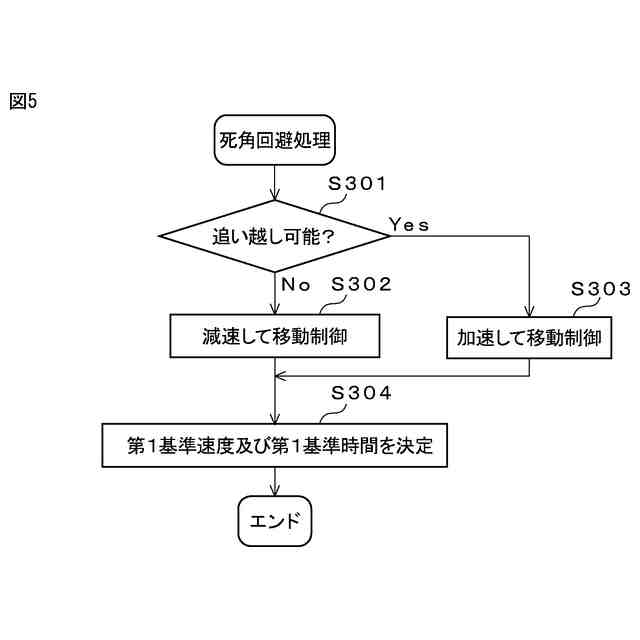
前記第1判定部によって自車両が他車両の死角領域に位置していると判定された場合、自車両の速度を変化させることにより自車両を他車両の死角領域から当該死角領域の外へ移動させる移動制御を開始することを決定する第1決定部と、
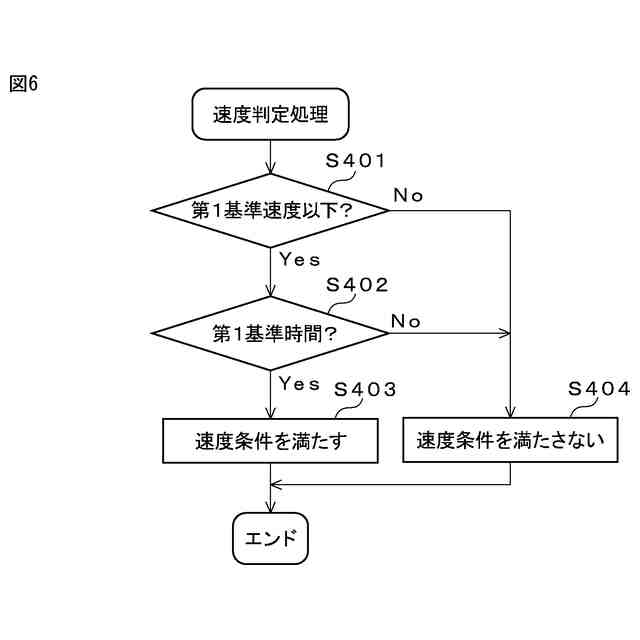
前記第1決定部によって開始することが決定された前記移動制御の実行中に、自車両と他車両との相対速度の絶対値が所定の基準速度以下の状態が所定の基準時間続いたか否か、又は、自車両の速度変化量が所定の基準変化量に到達したか否かを判定する第2判定部と、
前記第2判定部によって、自車両と他車両との相対速度の絶対値が前記基準速度以下の状態が前記基準時間続いたか、又は、自車両の速度変化量が前記基準変化量に到達したと判定された場合、前記移動制御を終了することを決定する第2決定部と、
を有する、ことを特徴とする車両制御装置。
続きを表示(約 1,600 文字)
【請求項2】
前記基準速度が大きい程、短くなるように前記基準時間を決定する、第3決定部を有する、請求項1に記載の車両制御装置。
【請求項3】
前記移動制御を開始することが決定された時点の自車両の速度が速い程、小さくなるように前記基準変化量を決定する第4決定部を有する、請求項1に記載の車両制御装置。
【請求項4】
前記第2判定部は、ドライバがステアリングホイールを把持するか、又は、ドライバが速度表示部を注視しており、且つ、自車両と他車両との相対速度の絶対値が前記基準速度以下の状態が前記基準時間続いたか否かを判定し、
前記第2決定部は、ドライバがステアリングホイールを把持するか、又は、ドライバが速度表示部を注視しており、且つ、自車両と他車両との相対速度の絶対値が前記基準速度以下の状態が前記基準時間続いたと判定した場合、前記移動制御を終了することを決定する、請求項1に記載の車両制御装置。
【請求項5】
前記第2判定部は、ドライバがステアリングホイールを把持するか、又は、ドライバが速度表示部を注視しており、且つ、自車両の速度変化量が前記基準変化量に到達したか否かを判定し、
前記第2決定部は、ドライバがステアリングホイールを把持するか、又は、ドライバが速度表示部を注視しており、且つ、自車両の速度変化量が前記基準変化量に到達したと判定した場合、前記移動制御を終了することを決定する、請求項1に記載の車両制御装置。
【請求項6】
前記第2決定部によって前記移動制御を終了することが決定された場合、前記移動制御において自車両の速度を変化させた向きとは反対に自車両を加速又は減速するように、自車両の速度を制御することを決定する第5決定部を有する、請求項1から5の何れか一項に記載の車両制御装置。
【請求項7】
自車両の周辺環境を表す情報に基づいて、自車両が他車両の死角領域に位置しているか否かを判定し、
自車両が他車両の死角領域に位置していると判定された場合、自車両の速度を変化させることにより自車両を他車両の死角領域から当該死角領域の外へ移動させる移動制御を開始することを決定し、
前記移動制御が開始された後に、自車両と他車両との相対速度の絶対値が所定の基準速度以下の状態が所定の基準時間続いたか否か、又は、自車両の速度変化量が所定の基準変化量に到達したか否かを判定し、
自車両と他車両との相対速度の絶対値が前記基準速度以下の状態が前記基準時間続いたか、又は、自車両の速度変化量が前記基準変化量に到達したと判定された場合、前記移動制御を終了することを決定する、
ことを含む処理をプロセッサに実行させる、ことを特徴とする車両制御用コンピュータプログラム。
【請求項8】
車両制御装置が、
自車両の周辺環境を表す情報に基づいて、自車両が他車両の死角領域に位置しているか否かを判定し、
自車両が他車両の死角領域に位置していると判定された場合、自車両の速度を変化させることにより自車両を他車両の死角領域から当該死角領域の外へ移動させる移動制御を開始することを決定し、
前記移動制御が開始された後に、自車両と他車両との相対速度の絶対値が所定の基準速度以下の状態が所定の基準時間続いたか否か、又は、自車両の速度変化量が所定の基準変化量に到達したか否かを判定し、
自車両と他車両との相対速度の絶対値が前記基準速度以下の状態が前記基準時間続いたか、又は、自車両の速度変化量が前記基準変化量に到達したと判定された場合、前記移動制御を終了することを決定する、
ことを実行する、ことを特徴とする車両制御用コンピュータプログラム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、車両制御装置、車両制御用コンピュータプログラム及び車両制御方法に関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
車両に搭載される自動制御システムは、自車両の現在位置と、自車両の目的位置と、ナビゲーション用地図とに基づいて、自車両のナビルートを生成する。自動制御システムは、地図情報を用いて自車両の現在位置を推定し、自車両をナビルートに沿って走行するように制御する。
【0003】
自動制御システムは、自車両と他車両との間に安全な距離が維持されるように、車両の走行を制御する。例えば、自動制御システムは、自車両の速度を制御して、自車両と他車両との間に安全な距離を維持する。
【0004】
また、自動制御システムは、自車両が隣接車線を走行する他車両の死角領域に位置していると判定した場合、自車両を減速又は加速することにより、死角領域から死角領域の外へ移動するように自車両を制御する。これにより、自動制御システムは、他車両から認識され難い死角領域から自車両を移動させて、自車両の安全を図る(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0005】
特開2019-72341号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
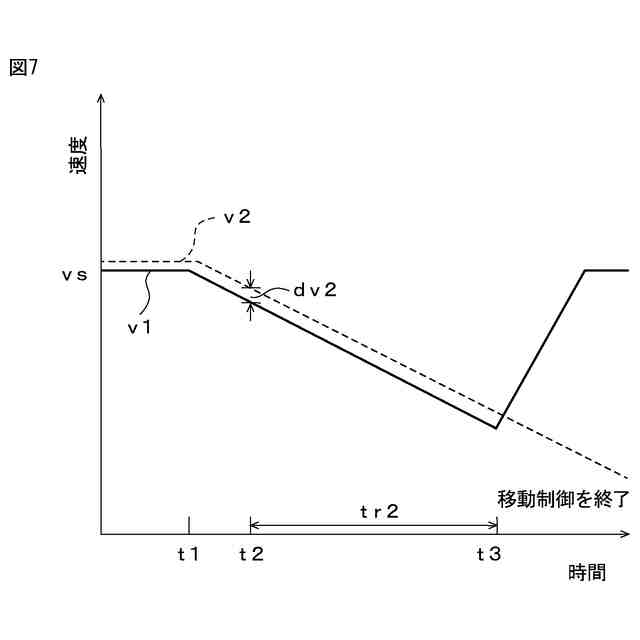
自動制御システムが自車両を減速又は加速することにより、自車両が他車両の死角領域からこの死角領域の外へ移動するように自車両を制御した時に、他車両も自車両と同じ様に速度を変化させる場合がある。
【0007】
この場合、自車両が他車両の死角領域から死角領域の外へ移動するように自車両を制御することを続けると、自車両は死角領域に位置し続けるという問題があった。
【0008】
そこで、本開示は、自車両を他車両の死角領域からこの死角領域の外へ移動する移動制御を行っているにも関わらず自車両が死角領域に位置し続ける場合、移動制御を終了する車両制御装置を提供することを目的とする。
【課題を解決するための手段】
【0009】
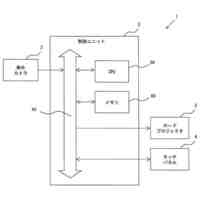
(1)一の実施形態によれば、車両制御装置が提供される。この車両制御装置は、自車両の周辺環境を表す情報に基づいて、自車両が他車両の死角領域に位置しているか否かを判定する第1判定部と、第1判定部によって自車両が他車両の死角領域に位置していると判定された場合、自車両の速度を変化させることにより自車両を他車両の死角領域から当該死角領域の外へ移動させる移動制御を開始することを決定する第1決定部と、第1決定部によって開始することが決定された移動制御の実行中に、自車両と他車両との相対速度の絶対値が所定の基準速度以下の状態が所定の基準時間続いたか否か、又は、自車両の速度変化量が所定の基準変化量に到達したか否かを判定する第2判定部と、第2判定部によって、自車両と他車両との相対速度の絶対値が基準速度以下の状態が基準時間続いたか、又は、自車両の速度変化量が基準変化量に到達したと判定された場合、移動制御を終了することを決定する第2決定部と、を有する、ことを特徴とする。
【0010】
(2)(1)の車両制御装置において、基準速度が大きい程、短くなるように基準時間を決定する、第3決定部を有することが好ましい。
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPatで参照する
関連特許
個人
飛行自動車
2か月前
個人
警告装置
10日前
個人
眼科手術車
3か月前
個人
小型EVシステム
12日前
個人
授乳用車両
3か月前
日本精機株式会社
ケース
18日前
日本精機株式会社
表示装置
25日前
個人
アンチロール制御装置
1か月前
日本精機株式会社
表示装置
25日前
日本精機株式会社
表示装置
1か月前
日本精機株式会社
表示装置
1か月前
日本精機株式会社
表示装置
1か月前
井関農機株式会社
作業車両
3か月前
日本精機株式会社
照明装置
1か月前
日本精機株式会社
表示装置
1か月前
日本精機株式会社
表示装置
2か月前
個人
ブレーキシステム
23日前
株式会社松華
懸架装置
1か月前
個人
台車用車輪止め具
3か月前
個人
自走式立体型洗車場
1か月前
個人
ステージカー
1か月前
個人
自動車ドア開度規制ベルト
11日前
横浜ゴム株式会社
タイヤ
22日前
トヨタ自動車株式会社
車両
3か月前
日本精機株式会社
車両用表示装置
1か月前
日本精機株式会社
車両用表示装置
1か月前
日本精機株式会社
車両用表示装置
3か月前
日本精機株式会社
車両用表示装置
1か月前
マツダ株式会社
車両
3か月前
マツダ株式会社
車両
1か月前
日本精機株式会社
車両用照明装置
2か月前
帝国繊維株式会社
作業車両
17日前
株式会社ユーシン
照明装置
25日前
マツダ株式会社
車両
1か月前
株式会社青木製作所
タンクローリ
3か月前
井関農機株式会社
作業車両
1か月前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ