TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024125627
公報種別
公開特許公報(A)
公開日
2024-09-19
出願番号
2023033566
出願日
2023-03-06
発明の名称
モータ制御装置およびモータ制御方法
出願人
株式会社デンソーテン
代理人
弁理士法人酒井国際特許事務所
主分類
H02P
21/05 20060101AFI20240911BHJP(電力の発電,変換,配電)
要約
【課題】モータ効率を低下させることなくトルクリプルを抑制することができるモータ制御装置およびモータ制御方法を提供すること。
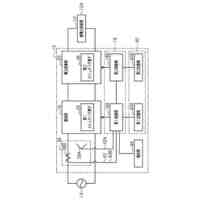
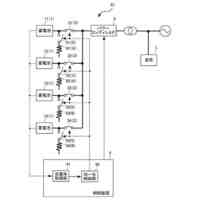
【解決手段】本願に係るモータ制御装置は、三相交流のモータを駆動制御するモータ制御装置であって、コントローラを有する。コントローラは、モータへ入力される電流の実測値に含まれる高調波成分を基本波座標から高調波座標へ変換し、高調波座標において、高調波成分の電流値が小さくなるようにフィードバック制御を行う。
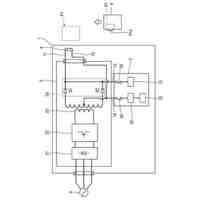
【選択図】図1
特許請求の範囲
【請求項1】
三相交流のモータを駆動制御するモータ制御装置であって、
前記モータへ入力される電流の実測値に含まれる高調波成分を基本波座標から高調波座標へ変換し、前記高調波座標において、前記高調波成分の電流値が小さくなるようにフィードバック制御を行うコントローラを備える
モータ制御装置。
続きを表示(約 700 文字)
【請求項2】
前記コントローラは、
前記フィードバック制御により前記高調波成分を抑制するための抑制信号を生成し、前記抑制信号を前記高調波座標から前記基本波座標へ変換し、変換した前記抑制信号を加えた電圧指令を前記モータへ出力する
請求項1に記載のモータ制御装置。
【請求項3】
前記コントローラは、
前記高調波成分を次数毎に前記基本波座標から前記高調波座標に変換して前記フィードバック制御を行う
請求項1または2に記載のモータ制御装置。
【請求項4】
前記コントローラは、
正相分および逆相分の次数の前記高調波成分が小さくなるように前記フィードバック制御を行う
請求項3に記載のモータ制御装置。
【請求項5】
前記コントローラは、
前記モータへ入力される電流のひずみ率を算出し、前記ひずみ率が予め定められた閾値以上である場合に、前記フィードバック制御を行う
請求項1に記載のモータ制御装置。
【請求項6】
前記コントローラは、
前記高調波成分の電流がゼロになるように前記フィードバック制御を行う
請求項1に記載のモータ制御装置。
【請求項7】
三相交流のモータを駆動制御するモータ制御装置が実行するモータ制御方法であって、
前記モータへ入力される電流の実測値に含まれる高調波成分を基本波座標から高調波座標へ変換し、前記高調波座標において、前記高調波成分の電流値が小さくなるようにフィードバック制御を行う
モータ制御方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、モータ制御装置およびモータ制御方法に関する。
続きを表示(約 1,200 文字)
【背景技術】
【0002】
従来、三相モータの出力トルクに発生する高調波の脈動(以下、トルクリプル)を抑制する技術が提案されている。例えば、特許文献1では、指令トルクに応じた指令信号(電流値一定の信号)に、予めトルクリプルを相殺するための高調波の信号を重畳させることで、出力トルクに発生するトルクリプルを抑制する技術が開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2012-100510号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、従来技術では、高調波の信号を重畳させているが、この際に重畳させる信号によっては、指令信号である正弦波のひずみが大きくなってしまう。ひずみが大きい指令信号がインバータに入力されると、インバータやモータにおける電流損失が大きくなってしまうため、最終的なモータ効率が低下してしまうおそれがある。
【0005】
本願は、上記に鑑みてなされたものであって、モータ効率を低下させることなくトルクリプルを抑制することができるモータ制御装置およびモータ制御方法を提供することを目的とする。
【課題を解決するための手段】
【0006】
本願に係るモータ制御装置は、三相交流のモータを駆動制御するモータ制御装置であって、コントローラを有する。前記コントローラは、前記モータへ入力される電流の実測値に含まれる高調波成分を基本波座標から高調波座標へ変換し、前記高調波座標において、前記高調波成分が小さくなるようにフィードバック制御を行う。
【発明の効果】
【0007】
実施形態の一態様によれば、モータ効率を低下させることなくトルクリプルを抑制することができるという効果を奏する。
【図面の簡単な説明】
【0008】
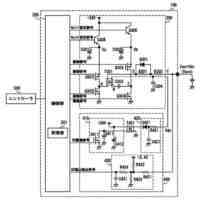
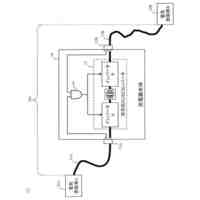
図1は、モータ制御システムの構成例を示すブロック図である。
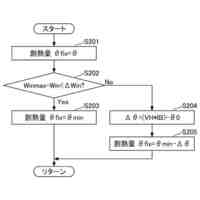
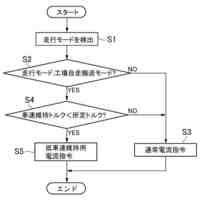
図2は、モータ制御装置が実行する全体処理の処理手順を示すフローチャートである。
図3は、モータ制御装置が実行する高調波制御の処理手順を示すフローチャートである。
【発明を実施するための形態】
【0009】
以下に、本願に係るモータ制御装置およびモータ制御方法を実施するための形態(以下、「実施形態」と記載する)について図面を参照しつつ詳細に説明する。なお、この実施形態により本願に係るモータ制御装置およびモータ制御方法が限定されるものではない。また、以下の各実施形態において同一の部位には同一の符号を付し、重複する説明は省略される。
【0010】
また、実施形態において、「実測値」と記載している各種値のうち、実際にセンサから取得するU、V、W相の電流実測値以外の実測値については、この電流実測値から演算等を行って求めた値を指す。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
発電機
2日前
個人
高電荷低電位電荷搬送体
16日前
株式会社豊田自動織機
回転電機
16日前
未来工業株式会社
ゲージ
16日前
株式会社アイシン
車両用駆動装置
10日前
富士電機株式会社
半導体装置
2日前
株式会社シマノ
電力供給装置
3日前
株式会社浅羽製作所
通線用先端誘導具
9日前
トヨタ自動車株式会社
蓄電池制御装置
4日前
株式会社ダイヘン
電力システム
4日前
日本航空電子工業株式会社
シール構造体
12日前
株式会社ダイヘン
蓄電池システム
9日前
コーセル株式会社
スイッチング電源装置
16日前
GX株式会社
可搬式太陽光発電用電源装置
2日前
キヤノン株式会社
電源装置、画像形成装置
3日前
矢崎総業株式会社
グロメット
12日前
トヨタ自動車株式会社
充電制御装置
2日前
株式会社ミツバ
端子ユニット
16日前
シンフォニアテクノロジー株式会社
充電装置
3日前
株式会社TMEIC
電力変換装置
2日前
マツダ株式会社
モータ
4日前
マツダ株式会社
モータ
4日前
個人
同期回転電機
9日前
株式会社ミツバ
モータ制御装置
16日前
本田技研工業株式会社
回転電機
16日前
株式会社ミツバ
モータ制御装置
16日前
株式会社ミツバ
モータ制御装置
16日前
本田技研工業株式会社
回転電機
12日前
株式会社オリジン
充電器
12日前
株式会社ミツバ
モータ制御装置
16日前
株式会社日立産機システム
回転電機
2日前
株式会社 神崎高級工機製作所
回転電機
9日前
トヨタ自動車株式会社
モータの制御装置
2日前
株式会社ゲットクリーンエナジー
コマ式発電機
10日前
矢崎総業株式会社
電気接続箱
3日前
矢崎総業株式会社
電気接続箱
3日前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ