TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024123917
公報種別
公開特許公報(A)
公開日
2024-09-12
出願番号
2023031732
出願日
2023-03-02
発明の名称
ロボット制御装置
出願人
ニデック株式会社
代理人
弁理士法人 佐野特許事務所
主分類
B25J
13/02 20060101AFI20240905BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】より安全なロボット制御が可能となるロボット制御装置を提供することを目的とする。
【解決手段】ロボット制御装置は、操作部と、前記操作部を駆動する駆動部と、前記操作部とロボットとを連動させる連動制御部と、を備え、前記連動制御部は、前記駆動部を用いた前記操作部の操作負荷に関する制御を行う。
【選択図】図1
特許請求の範囲
【請求項1】
操作部と、
前記操作部を駆動する駆動部と、
前記操作部とロボットとを連動させる連動制御部と、
を備え、
前記連動制御部は、前記駆動部を用いた前記操作部の操作負荷に関する制御を行う、ロボット制御装置。
続きを表示(約 820 文字)
【請求項2】
前記連動制御部は、前記操作部の操作に連動させて前記ロボットを制御し、前記ロボットの動作状況に基づいて前記操作負荷の変化に関する前記制御を前記駆動部に対して行う、請求項1に記載のロボット制御装置。
【請求項3】
前記連動制御部は、前記ロボットとワークとの位置関係に基づいて前記制御を行う、請求項2に記載のロボット制御装置。
【請求項4】
前記連動制御部は、前記ロボットの動作速度に基づいて前記制御を行う、請求項2に記載のロボット制御装置。
【請求項5】
前記連動制御部は、前記操作部における操作速度に基づいて前記操作負荷の変化に関する前記制御を前記駆動部に対して行う、請求項2に記載のロボット制御装置。
【請求項6】
前記連動制御部は、前記ロボットが過負荷を付与された旨を示す信号を前記ロボットから受けた場合に、前記操作部の操作を妨げるための制御を前記駆動部に対して行う、請求項2に記載のロボット制御装置。
【請求項7】
前記連動制御部は、前記ロボットにおける特定の動作状況に基づいて前記操作部に振動を与えるための制御を前記駆動部に対して行う、請求項2に記載のロボット制御装置。
【請求項8】
前記操作部は、回転可能なハンドルを有し、
前記連動制御部は、
前記ハンドルの回転角度に応じてカウント値を変化させるカウンタと、
前記カウント値に応じた位置に前記ロボットを移動制御する制御部と、
を有する、請求項2に記載のロボット制御装置。
【請求項9】
前記連動制御部は、前記ロボットの動作に連動させて前記駆動部を介して前記操作部を動作させ、前記駆動部によって検出される前記操作部に付与される負荷に基づいて前記ロボットの動作速度を制御する、請求項1に記載のロボット制御装置。
発明の詳細な説明
【技術分野】
【0001】
本開示は、ロボット制御装置に関する。
続きを表示(約 1,100 文字)
【背景技術】
【0002】
従来、産業用ロボットのティーチング作業において、いきなり本来の動作速度でロボットを連続稼働させるのではなく、まずは低速で動作させる場合がある。例えば、ティーチング用の操作装置であるティーチングペンダントに設けられたジョグダイヤルを使用して、ロボットを低速再生動作させる技術が特許文献1に開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2017-18939号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、従来のロボット制御装置には、ロボット制御の安全性に改善の余地があった。
【0005】
上記状況に鑑み、本開示は、より安全なロボット制御が可能となるロボット制御装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
本開示の例示的なロボット制御装置は、操作部と、前記操作部を駆動する駆動部と、前記操作部とロボットとを連動させる連動制御部と、を備え、前記連動制御部は、前記駆動部を用いた前記操作部の操作負荷に関する制御を行う。
【発明の効果】
【0007】
本開示の例示的なロボット制御装置によれば、より安全なロボット制御が可能となる。
【図面の簡単な説明】
【0008】
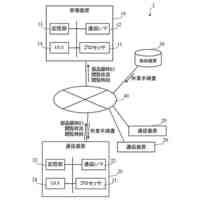
図1は、本開示の例示的な実施形態に係るロボット制御装置の構成を示すブロック図である。
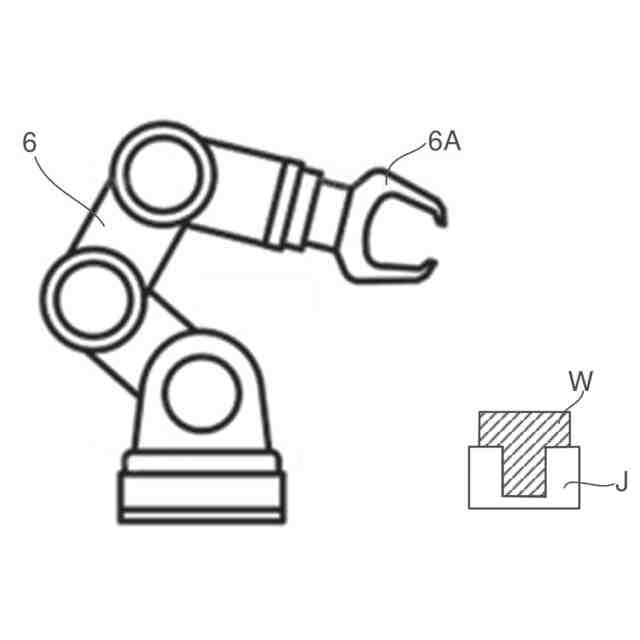
図2は、ロボットの模式図である。
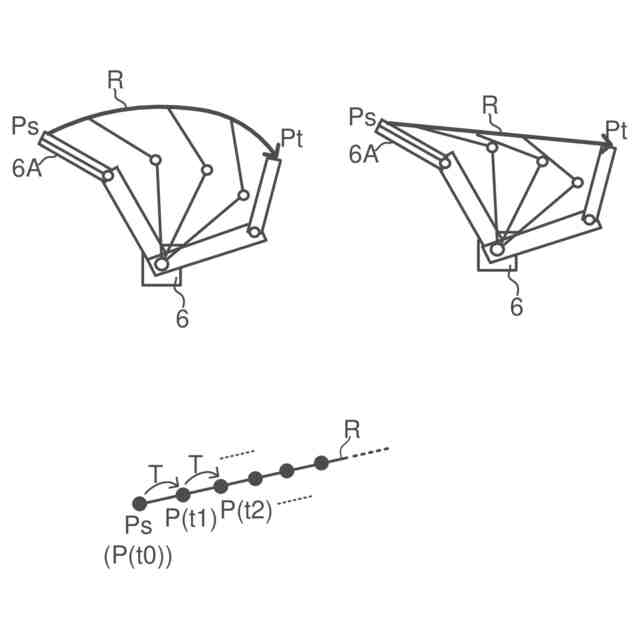
図3は、経由点を説明するための図である。
図4は、操作部(ハンドル)の操作方向とロボットの動作方向との対応関係を示す図である。
図5は、ハンドル操作モードの動作に関するフローチャートである。
図6は、ハンドル操作モードの動作に関するフローチャートである。
図7は、ハンドル自動回転モードの動作に関するフローチャートである。
図8は、ハンドル自動回転モードの動作に関するフローチャートである。
図9は、ハンドル自動回転モードの動作に関するフローチャートである。
【発明を実施するための形態】
【0009】
以下に図面を参照して本開示の例示的な実施形態を説明する。
【0010】
<1.ロボット制御装置の構成>
図1は、本開示の例示的な実施形態に係るロボット制御装置10の構成を示すブロック図である。ロボット制御装置10は、ロボット6を制御する装置であり、操作部1と、駆動部2と、ハンドルコントローラ3と、ロボットコントローラ4と、を備える。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
ニデック株式会社
モータ
3日前
ニデック株式会社
モータ
3日前
ニデック株式会社
モータ
16日前
ニデック株式会社
モータ
16日前
ニデック株式会社
駆動装置
26日前
ニデック株式会社
モータユニット
2日前
ニデック株式会社
モータユニット
2日前
ニデック株式会社
親水膜及び光学部材
2日前
ニデック株式会社
送風装置及び掃除機
4日前
ニデック株式会社
ロータ、およびモータ
2日前
ニデック株式会社
クロスフローファンおよび冷蔵庫
2日前
ニデック株式会社
ロータ、回転電機、および駆動装置
2日前
ニデック株式会社
ロータ、回転電機、および駆動装置
26日前
ニデック株式会社
反射調整膜、光学部材及びレンズユニット
2日前
ニデック株式会社
作業管理システム、管理装置およびプログラム
25日前
ニデック株式会社
光学部材、レンズユニット及び光学部材の製造方法
2日前
ニデック株式会社
光学部材及びレンズユニット
12日前
テクトロニクス・インコーポレイテッド
試験測定装置及び三相モータの欠陥検出方法
17日前
個人
木製ハンマー
2か月前
個人
関節モジュール
2か月前
個人
寸切りボルト回し
2か月前
個人
スロットルトリガー
2か月前
日東精工株式会社
搬送装置
7か月前
中国電力株式会社
腰袋
5か月前
太陽工業株式会社
チャック装置
1か月前
コクヨ株式会社
補助器具
1か月前
日東工器株式会社
動力工具
2か月前
日東工器株式会社
衝撃工具
4か月前
日東工器株式会社
動力工具
2か月前
日東工器株式会社
動力工具
2か月前
日東工器株式会社
動力工具
2か月前
個人
メンテナンス用スタンド
3か月前
オムロン株式会社
電動把持工具
1か月前
学校法人立命館
グリッパ
2か月前
CKD株式会社
把持装置
2か月前
トヨタ自動車株式会社
ロボット
3か月前
続きを見る
他の特許を見る








 特許ウォッチ
特許ウォッチ