TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024122738
公報種別
公開特許公報(A)
公開日
2024-09-09
出願番号
2023030449
出願日
2023-02-28
発明の名称
演算装置、演算方法、及びプログラム
出願人
横河電機株式会社
代理人
個人
,
個人
,
個人
,
個人
主分類
G05B
13/02 20060101AFI20240902BHJP(制御;調整)
要約
【課題】制御対象機器のフィードバック制御に関する作業負荷を軽減可能な演算装置を提供する。
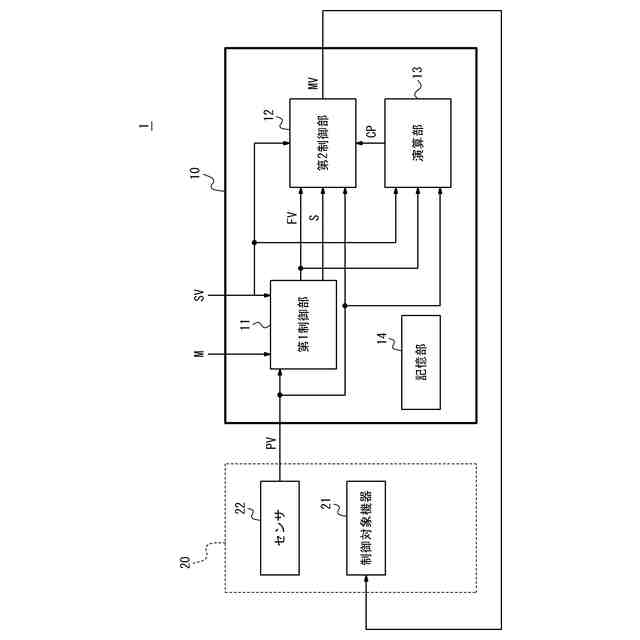
【解決手段】本開示に係る演算装置10は、制御対象機器21について測定された測定値PVに応じた機能出力値FVを、学習用データを用いて学習したモデルMを用いて出力する第1制御が実行されているときに、フィードバック制御により測定値PVに応じた制御対象機器21への制御出力値MVを制御対象機器21に出力する第2制御に用いる制御パラメータCPを、測定値PVと測定値PVに対する目標値SVとに基づいて算出する演算部13、を備える。
【選択図】図1
特許請求の範囲
【請求項1】
制御対象機器について測定された測定値に応じた機能出力値を、学習用データを用いて学習したモデルを用いて出力する第1制御が実行されているときに、フィードバック制御により前記測定値に応じた前記制御対象機器への制御出力値を前記制御対象機器に出力する第2制御に用いる制御パラメータを、前記測定値と前記測定値に対する目標値とに基づいて算出する演算部、
を備える、
演算装置。
続きを表示(約 940 文字)
【請求項2】
請求項1に記載の演算装置であって、
前記機能出力値を第2制御部に出力して前記第1制御を実行する第1制御部と、
前記制御パラメータを前記演算部から取得して前記第2制御を実行する前記第2制御部と、
を備え、
前記第1制御部又は前記第2制御部により前記制御対象機器を制御する、
演算装置。
【請求項3】
請求項1又は2に記載の演算装置であって、
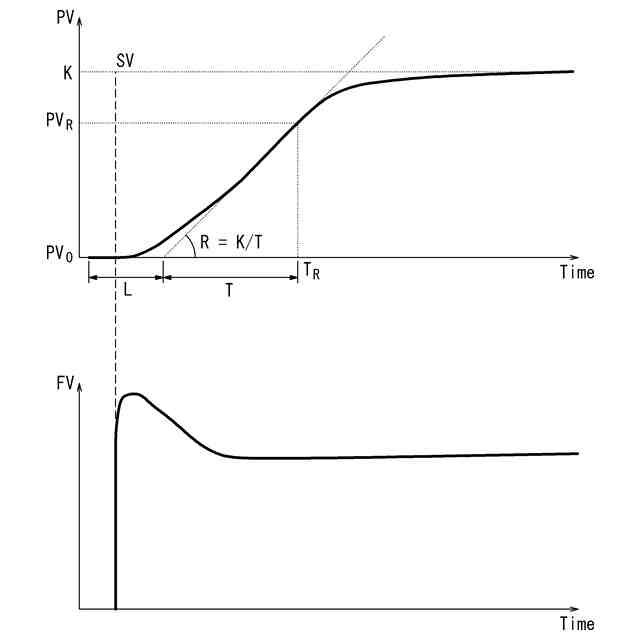
前記演算部は、前記第1制御に基づく前記機能出力値を取得し、取得された前記機能出力値の変化量が閾値を超えたときを前記制御パラメータの算出の起点として前記測定値の取得を開始する、
演算装置。
【請求項4】
請求項1又は2に記載の演算装置であって、
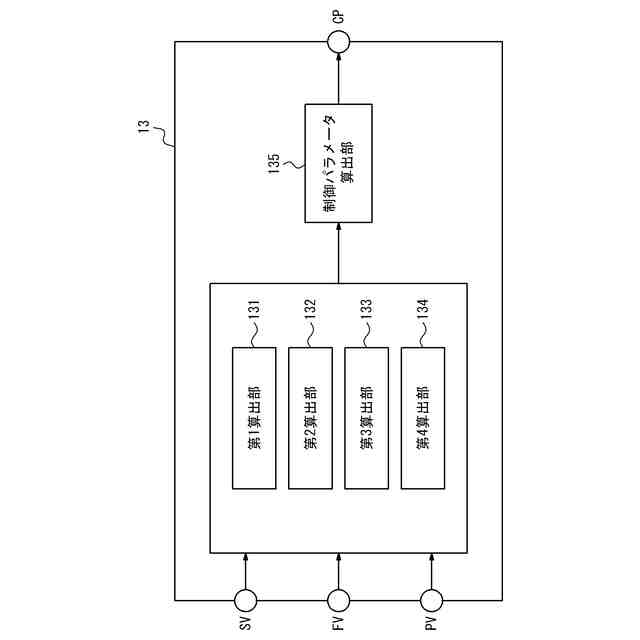
前記演算部は、前記測定値の単位時間当たりの変化量に基づいて、前記制御パラメータを算出するための複数のパラメータを算出する、
演算装置。
【請求項5】
請求項1又は2に記載の演算装置であって、
前記制御パラメータは、比例制御、積分制御、又は微分制御の少なくとも1つに対応するパラメータを含む、
演算装置。
【請求項6】
制御対象機器について測定された測定値に応じた機能出力値を、学習用データを用いて学習したモデルを用いて出力する第1制御が実行されているときに、フィードバック制御により前記測定値に応じた前記制御対象機器への制御出力値を前記制御対象機器に出力する第2制御に用いる制御パラメータを、前記測定値と前記測定値に対する目標値とに基づいて算出するステップを含む、
演算方法。
【請求項7】
演算装置に、
制御対象機器について測定された測定値に応じた機能出力値を、学習用データを用いて学習したモデルを用いて出力する第1制御が実行されているときに、フィードバック制御により前記測定値に応じた前記制御対象機器への制御出力値を前記制御対象機器に出力する第2制御に用いる制御パラメータを、前記測定値と前記測定値に対する目標値とに基づいて算出するステップを含む動作を実行させる、
プログラム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、演算装置、演算方法、及びプログラムに関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
従来、機器の制御に関する技術が知られている。例えば、特許文献1には、第1制御部及び第2制御部のいずれによって制御対象機器を制御するかの切り替えを行う制御装置が開示されている。第1制御部は、フィードバック制御又はフィードフォワード制御の少なくとも一方により、測定値に応じた制御対象機器の操作量を出力する。第2制御部は、学習用データを用いて学習したモデルを用いて、測定値に応じた制御対象機器の操作量を出力する。
【0003】
特許文献1には、AI(Artificial Intelligence)コントロール機能とPID(Proportional-Integral-Differential)コントロール機能とを状況に応じて切り替えながら利用できるハイブリッド型の制御装置が一例として開示されている。このような制御装置は、目的とする制御性に応じて、AIコントロール機能とPIDコントロール機能とを切り替えて制御を実行する。
【先行技術文献】
【特許文献】
【0004】
特開2021-174259号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
従来のハイブリッド型の制御装置では、AIコントロール機能とPIDコントロール機能とを切り替えて制御を実行可能であるが、PIDコントロール機能の制御パラメータを事前に調べて、設定する必要がある。制御パラメータは、有識者による手動調整又は限界感度法及びステップ応答法などの方法で行う自動調整により得ることが可能である。しかしながら、これらの調整に要する時間が長く、調整に関する作業負荷が大きかった。
【0006】
本開示は、制御対象機器のフィードバック制御に関する作業負荷を軽減可能な演算装置、演算方法、及びプログラムを提供することを目的とする。
【課題を解決するための手段】
【0007】
幾つかの実施形態に係る演算装置は、制御対象機器について測定された測定値に応じた機能出力値を、学習用データを用いて学習したモデルを用いて出力する第1制御が実行されているときに、フィードバック制御により前記測定値に応じた前記制御対象機器への制御出力値を前記制御対象機器に出力する第2制御に用いる制御パラメータを、前記測定値と前記測定値に対する目標値とに基づいて算出する演算部、を備える。
【0008】
これにより、演算装置は、制御対象機器のフィードバック制御に関する作業負荷を軽減可能である。演算装置は、第1制御が実行されているときに、第2制御に用いる制御パラメータを、測定値と測定値に対する目標値とに基づいて算出する。これにより、演算装置は、ハイブリッド型の制御装置として、第1制御中に制御パラメータを自動算出可能である。したがって、ユーザは、第2制御に用いる制御パラメータを事前に設定する必要がない。
【0009】
一実施形態における演算装置は、前記機能出力値を第2制御部に出力して前記第1制御を実行する第1制御部と、前記制御パラメータを前記演算部から取得して前記第2制御を実行する前記第2制御部と、を備え、前記第1制御部又は前記第2制御部により前記制御対象機器を制御してもよい。
【0010】
これにより、演算装置は、制御パラメータの算出に関連する各種演算処理及び制御対象機器を制御するための各種処理を、演算装置単体で実行することが可能である。したがって、演算装置を用いるユーザの利便性が向上する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
エイブリック株式会社
基準電圧回路
16日前
和研工業株式会社
多連レバー機構
29日前
株式会社クボタ
作業車
19日前
スター精密株式会社
工作機械
1か月前
ローム株式会社
半導体集積回路
24日前
株式会社ダイフク
搬送車
19日前
エイブリック株式会社
ボルテージレギュレータ
16日前
トヨタ自動車株式会社
工作機械の制御装置
18日前
トヨタ自動車株式会社
工作機械の制御装置
17日前
愛知機械テクノシステム株式会社
無人搬送車
1か月前
株式会社やまびこ
走行制御装置
4日前
国立大学法人広島大学
モデル誤差抑制補償器
1か月前
株式会社ダイフク
物品搬送設備
17日前
アズビル株式会社
制御システムおよび制御方法
1か月前
アズビル株式会社
制御システムおよび制御方法
1か月前
アズビル株式会社
制御システムおよび制御方法
1か月前
日本精工株式会社
制御装置および制御方法
1か月前
トヨタ自動車株式会社
自律走行装置
1か月前
株式会社ダイヘン
搬送車
16日前
株式会社ダイヘン
搬送車
16日前
株式会社ダイヘン
搬送車
16日前
株式会社ダイヘン
搬送車
16日前
チームラボ株式会社
走行システム及び走行路
1か月前
日本精工株式会社
制御システムおよび制御方法
1か月前
ローム株式会社
半導体装置
1か月前
村田機械株式会社
稼働監視システム及び稼働監視方法
1か月前
株式会社デンソー
診断装置
2日前
ミツミ電機株式会社
電源回路及びその起動方法
1か月前
トヨタ自動車株式会社
群制御システム及び群制御方法
1か月前
井関農機株式会社
作業車両
12日前
ミツミ電機株式会社
多方向入力装置
1か月前
ミツミ電機株式会社
多方向入力装置
22日前
ミツミ電機株式会社
多方向入力装置
1か月前
ミツミ電機株式会社
多方向入力装置
1か月前
ミツミ電機株式会社
多方向入力装置
22日前
ミツミ電機株式会社
多方向入力装置
22日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ


































