TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024122483
公報種別
公開特許公報(A)
公開日
2024-09-09
出願番号
2023030046
出願日
2023-02-28
発明の名称
作業機械および作業機械の制御方法
出願人
株式会社小松製作所
代理人
弁理士法人新樹グローバル・アイピー
主分類
E02F
9/26 20060101AFI20240902BHJP(水工;基礎;土砂の移送)
要約
【課題】ブレードを障害物として誤検知している可能性がある場合にオペレータに対処を促すことが可能な作業機械を提供する。
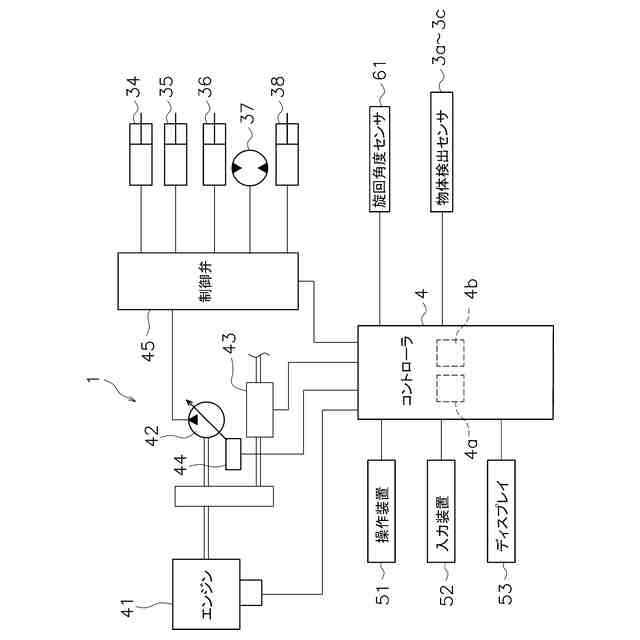
【解決手段】油圧ショベル1は、下部走行体11と、上部旋回体12と、ブレード13と、物体検知センサ3a~3cと、ディスプレイ53と、コントローラ4と、を備える。上部旋回体12は、下部走行体11に対して旋回可能である。ブレード13は、下部走行体11に取り付けられ、上下方向に動作可能である。ディスプレイ53は、オペレータにブレード13の下げ動作を促す指示を行う。コントローラ4は、物体検知センサ3a~3cにより検知した物体がブレード13の可能性があると判断した場合、指示を行わせるようにディスプレイに指令を出力する。
【選択図】図3
特許請求の範囲
【請求項1】
下部走行体と、
前記下部走行体に対して旋回可能な上部旋回体と、
前記下部走行体に取り付けられ、上下方向に動作可能なブレードと、
前記上部旋回体に配置され、周囲の物体を検知する物体検知部と、
オペレータに前記ブレードの下げ動作を促す指示を行う指示部と、
前記物体検知部により検知した物体が前記ブレードの可能性があると判断した場合、前記指示を行わせるように前記指示部に指令信号を出力するコントローラと、を備えた作業機械。
続きを表示(約 750 文字)
【請求項2】
前記ブレードの存在位置を検知するブレード位置検知部を更に備え、
前記コントローラは、前記ブレード位置検知部に基づいた前記ブレードの存在位置に、前記物体検知部により検知した物体の検知位置が含まれる場合、前記物体が前記ブレードの可能性があると判断する、
請求項1に記載の作業機械。
【請求項3】
前記ブレード位置検知部は、前記下部走行体に対する前記上部旋回体の旋回角度を検知する旋回角度センサを有し、
前記コントローラは、前記旋回角度センサによって検知された旋回角度に基づいて、前記ブレードの存在位置を求める、
請求項2に記載の作業機械。
【請求項4】
前記ブレード位置検知部は、前記上部旋回体の周囲を撮像する撮像部を有し、
前記コントローラは、前記撮像部によって撮像された画像データに基づいて、前記ブレードの存在位置を求める、
請求項2に記載の作業機械。
【請求項5】
前記物体検知部は、レーダを含む、
請求項1に記載の作業機械。
【請求項6】
下部走行体と、前記下部走行体に対して旋回可能な上部旋回体と、前記下部走行体に取り付けられ、上下方向に動作可能なブレードと、を備えた作業機械の制御方法であって、
前記作業機械の周囲の物体を検知する物体検知ステップと、
前記物体検知ステップによって検知した物体が前記ブレードの可能性があるか否かを判断する判断ステップと、
前記物体検知ステップにより検知した物体が前記ブレードの可能性があると判断した場合、前記ブレードの下げ動作を促す指示を行う指示ステップと、を備えた、
作業機械の制御方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、作業機械および作業機械の制御方法に関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
道路工事や、管埋設工事等でショベル機械が多く使用されている。ショベル機械は、下部走行体と、下部走行体に対して旋回可能な上部旋回体と、を備えている。このようなショベル機械に対して周囲の障害物を検知するためにセンサを設ける構成が提案されている(例えば、特許文献1参照)。
【0003】
一方、ショベル機械には、下部走行体に、整地作業等に用いられるブレードが装着される場合がある(例えば、特許文献2の図1参照)。
【先行技術文献】
【特許文献】
【0004】
特許第6468444号明細書
特開2022-190397号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、ブレードがセンサの検知範囲内に入ると、ブレードを障害物として誤検知するため、障害物の存在を検知し難かった。
【0006】
本開示は、ブレードを障害物として誤検知している可能性がある場合にオペレータに対処を促すことが可能な作業機械および作業機械の制御方法を提供することを目的とする。
【課題を解決するための手段】
【0007】
本開示の態様にかかる作業機械は、下部走行体と、上部旋回体と、ブレードと、物体検知部と、指示部と、コントローラと、を備える。上部旋回体は、下部走行体に対して旋回可能である。ブレードは、下部走行体に取り付けられ、上下方向に動作可能である。指示部は、オペレータにブレードの下げ動作を促す指示を行う。コントローラは、物体検知部により検知した物体がブレードの可能性があると判断した場合、指示を行わせるように指示部に指令を出力する。
【0008】
本開示の他の態様にかかる作業機械の制御方法は、物体検知ステップと、判断ステップと、指示ステップと、を備える。作業機械は、下部走行体と、下部走行体に対して旋回可能な上部旋回体と、下部走行体に取り付けられ、上下方向に動作可能なブレードと、を備える。物体検知ステップは、作業機械の周囲の物体を検知する。判断ステップは、物体検知ステップによって検知した物体がブレードの可能性があるか否かを判断する。指示ステップは、物体検知ステップにより検知した物体がブレードの可能性があると判断した場合、ブレードの下げ動作を促す指示を行う。
【発明の効果】
【0009】
本開示の態様によれば、ブレードを障害物として誤検知している可能性がある場合にオペレータに対処を促すことが可能な作業機械および作業機械の制御方法を提供することができる。
【図面の簡単な説明】
【0010】
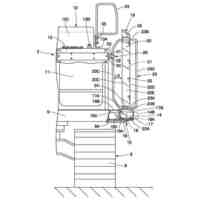
本開示の実施形態1にかかる油圧ショベルを示す左側面図である。
本開示の実施形態1にかかる油圧ショベルを示す右側面図である。
本開示の実施形態1にかかる油圧ショベルを示す背面図である。
本開示の実施形態1にかかる油圧ショベルの物体検知センサによる物体検知範囲を示す平面図である。
本開示の実施形態1にかかる油圧ショベルの制御構成を示すブロック図である。
本開示の実施形態1にかかる油圧ショベルにおいてブレードが物体検知センサによって検知される状態を示す側面図である。
本開示の実施形態1にかかる油圧ショベルの動作を示すフロー図である。
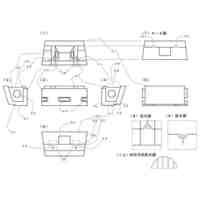
(a)本開示の実施形態2にかかる油圧ショベルの上部旋回体の左側面部を示す図である。(b)本開示の実施形態2にかかる油圧ショベルの上部旋回体の右側面部を示す図である。(c)本開示の実施形態2にかかる油圧ショベルの上部旋回体の背面部を示す図である。
本開示の実施形態2にかかる油圧ショベルのカメラの撮像範囲を示す平面図である。
本開示の実施形態2にかかる油圧ショベルの制御構成を示すブロック図である。
本開示の実施形態2にかかる油圧ショベルの動作を示すフロー図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社小松製作所
作業機械および積荷質量算出方法
4日前
株式会社小松製作所
作業機械および積荷質量算出方法
4日前
株式会社小松製作所
昇圧装置、補正値検出用情報生成装置、温度推定装置、内部抵抗推定装置、昇圧方法、補正値検出用情報生成方法、及びプログラム
10日前
大和ハウス工業株式会社
柱脚
10日前
日鉄建材株式会社
土砂捕捉柵
24日前
日鉄建材株式会社
土砂捕捉柵
24日前
株式会社高知丸高
仮締切構造体
12日前
株式会社パルパルス
抜け止め装置
26日前
株式会社エスイー
対土石流構造物
5日前
日本ソリッド株式会社
防舷材の保護方法
18日前
大和ハウス工業株式会社
バケット
24日前
日立建機株式会社
建設機械
25日前
日立建機株式会社
作業機械
17日前
日立建機株式会社
作業機械
24日前
日立建機株式会社
作業機械
26日前
住友重機械工業株式会社
作業機械
4日前
清水建設株式会社
杭圧入機
5日前
株式会社テノックス
共回り監視装置
20日前
エバタ株式会社
地下構造物の浮上防止方法
10日前
株式会社西原鉄工所
コンクリートブロック
20日前
株式会社テノックス
深層混合処理工法
20日前
西部電機株式会社
水門開閉装置
17日前
炎重工株式会社
桟橋及び移動体システム
24日前
株式会社日立建機ティエラ
建設機械
24日前
株式会社日立建機ティエラ
作業機械
24日前
日立建機株式会社
建設機械
25日前
日立建機株式会社
建設機械
25日前
コベルコ建機株式会社
作業機械の制御装置
25日前
日立建機株式会社
建設機械
25日前
C技研株式会社
切削装置
20日前
鹿島建設株式会社
運搬機構および管体の搬送方法
18日前
ヤンマーホールディングス株式会社
建設機械
25日前
ヤンマーホールディングス株式会社
作業機械
25日前
日鉄建材株式会社
梁部材の取付構造及び土砂捕捉柵
24日前
日立建機株式会社
作業機械
24日前
日立建機株式会社
作業機械
25日前
続きを見る
他の特許を見る










 特許ウォッチ
特許ウォッチ