TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024109364
公報種別
公開特許公報(A)
公開日
2024-08-14
出願番号
2023014115
出願日
2023-02-01
発明の名称
負荷制御装置および制御方法
出願人
日新電機株式会社
代理人
弁理士法人 HARAKENZO WORLD PATENT & TRADEMARK
主分類
H02J
3/18 20060101AFI20240806BHJP(電力の発電,変換,配電)
要約
【課題】フリッカの低減と負荷装置の効率的な運用とを両立する。
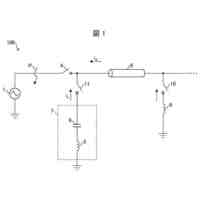
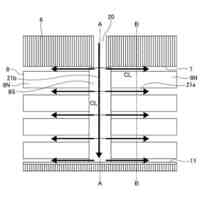
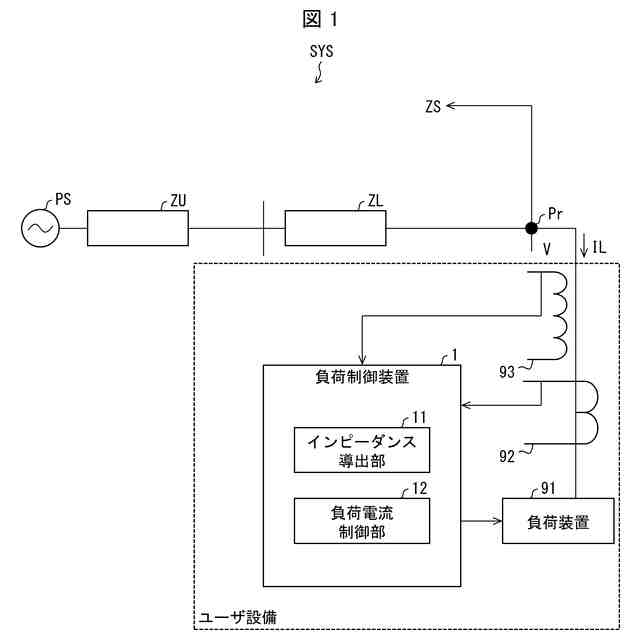
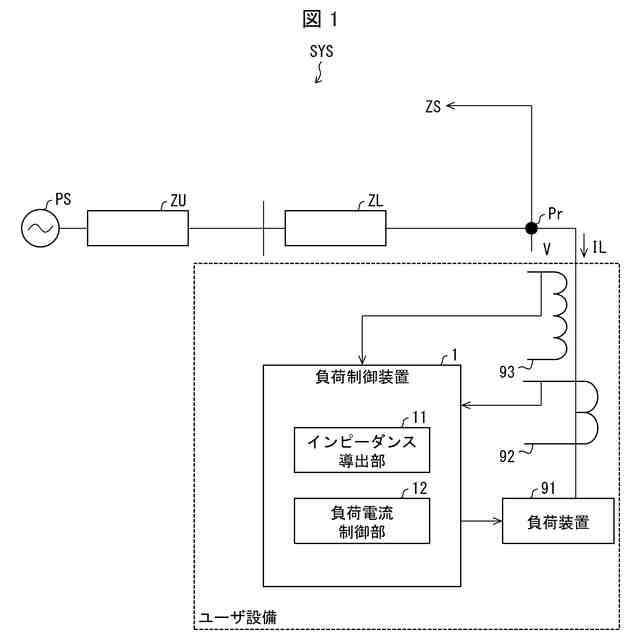
【解決手段】負荷制御装置(1)は、電力系統(SYS)における受電点(Pr)よりも下流側に位置する負荷装置(91)を制御する。負荷制御装置(1)は、電力系統(SYS)における受電点(Pr)よりも上流側のインピーダンスである上位系統インピーダンス(ZS)を導出する。負荷制御装置(1)は、上記上流側から受電点(Pr)を通じて負荷装置(91)に流れる負荷電流(IL)を、導出した上位系統インピーダンス(ZS)に基づいて制御する。
【選択図】図1
特許請求の範囲
【請求項1】
電力系統における受電点よりも下流側に位置する負荷装置を制御する負荷制御装置であって、
上記負荷制御装置は、
上記電力系統における上記受電点よりも上流側のインピーダンスである上位系統インピーダンスを導出し、
上記上流側から上記受電点を通じて上記負荷装置に流れる負荷電流を、導出した上記上位系統インピーダンスに基づいて制御する、負荷制御装置。
続きを表示(約 970 文字)
【請求項2】
上記電力系統では、(i)上記上位系統インピーダンスの公称値である第1公称値と、(ii)上記第1公称値に対応する上記負荷電流の公称値である第2公称値と、が予め設定されており、
上記負荷制御装置は、導出した上記上位系統インピーダンスが上記第1公称値よりも小さい場合には、上記負荷電流が上記第2公称値を越えることを許容するように上記負荷電流を制御する、請求項1に記載の負荷制御装置。
【請求項3】
上記負荷制御装置は、導出した上記上位系統インピーダンスが上記第1公称値よりも小さい場合には、許容される上記負荷電流の最大値を、上記上位系統インピーダンスに負の相関を有する値として設定する、請求項2に記載の負荷制御装置。
【請求項4】
上記負荷制御装置は、
上記負荷電流の実効値である負荷電流実効値を導出し、
上記負荷電流実効値の時間変化率をさらに導出し、
上記時間変化率にさらに基づいて上記負荷電流を制御する、請求項1から3のいずれか1項に記載の負荷制御装置。
【請求項5】
上記負荷制御装置は、上記時間変化率に基づいて、許容される上記負荷電流の実効値の最大値を設定する、請求項4に記載の負荷制御装置。
【請求項6】
上記負荷制御装置は、上記負荷電流に基づいて上記上位系統インピーダンスを導出する、請求項1に記載の負荷制御装置。
【請求項7】
上記負荷制御装置は、次数間高調波注入方式によって上記上位系統インピーダンスを導出する、請求項1に記載の負荷制御装置。
【請求項8】
上記負荷装置は、インバータを含んでいる、請求項1に記載の負荷制御装置。
【請求項9】
電力系統における受電点よりも下流側に位置する負荷装置を制御する制御方法であって、
上記電力系統における上記受電点よりも上流側のインピーダンスである上位系統インピーダンスを導出するインピーダンス導出工程と、
上記上流側から上記受電点を通じて上記負荷装置に流れる負荷電流を、上記インピーダンス導出工程において導出した上記上位系統インピーダンスに基づいて制御する負荷電流制御工程と、を含んでいる、制御方法。
発明の詳細な説明
【技術分野】
【0001】
本発明の一態様は、負荷制御装置に関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
電力系統内における負荷装置の動作に伴って生じる電圧フリッカ(以下、単に「フリッカ」と称する)に関する様々な技術が提案されている。例えば、下記の特許文献1には、高周波インバータの制御装置の応答速度を高速化させたことに伴って生じるフリッカを、簡易に低減するための手法が開示されている。
【0003】
また、下記の特許文献2には、変電所内外の同一母線から電力供給される複数のフィーダに同時に発生するフリッカのΔV10値(フリッカの表示尺度の1つ)を、フィーダ別に測定するための手法が開示されている。
【先行技術文献】
【特許文献】
【0004】
特開2015-61441号公報
特開平6-284579号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
本発明の一態様の目的は、フリッカの低減と負荷装置の効率的な運用とを両立することにある。
【課題を解決するための手段】
【0006】
上記の課題を解決するために、本発明の一態様に係る負荷制御装置は、電力系統における受電点よりも下流側に位置する負荷装置を制御する負荷制御装置であって、上記負荷制御装置は、上記電力系統における上記受電点よりも上流側のインピーダンスである上位系統インピーダンスを導出し、上記上流側から上記受電点を通じて上記負荷装置に流れる負荷電流を、導出した上記上位系統インピーダンスに基づいて制御する。
【0007】
また、本発明の一態様に係る制御方法は、電力系統における受電点よりも下流側に位置する負荷装置を制御する制御方法であって、上記電力系統における上記受電点よりも上流側のインピーダンスである上位系統インピーダンスを導出するインピーダンス導出工程と、上記上流側から上記受電点を通じて上記負荷装置に流れる負荷電流を、上記インピーダンス導出工程において導出した上記上位系統インピーダンスに基づいて制御する負荷電流制御工程と、を含んでいる。
【発明の効果】
【0008】
本発明の一態様によれば、フリッカの低減と負荷装置の効率的な運用とを両立できる。
【図面の簡単な説明】
【0009】
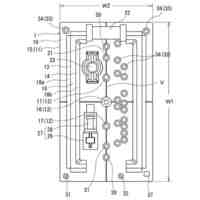
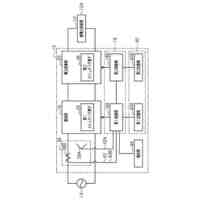
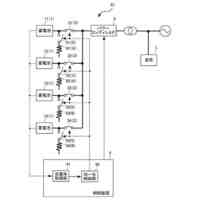
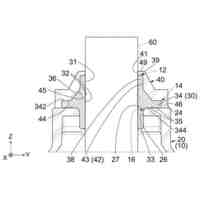
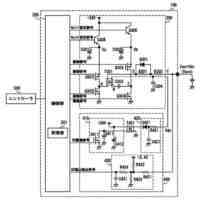
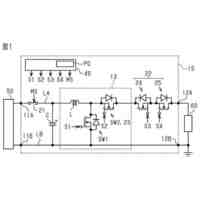
実施形態1の負荷制御装置の一構成例について説明するための図である。
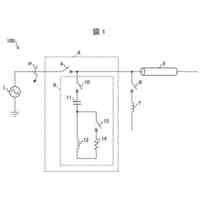
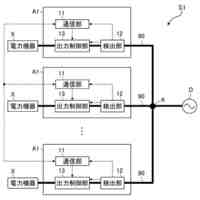
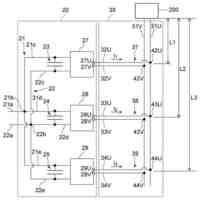
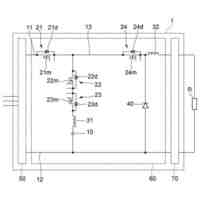
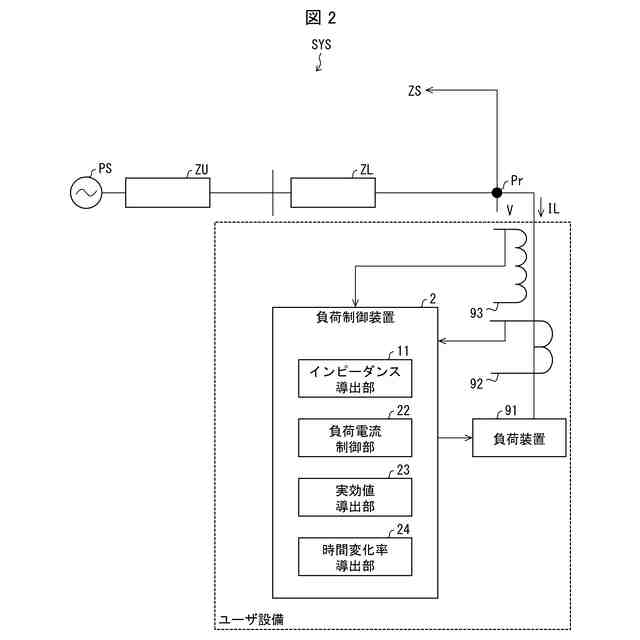
実施形態2の負荷制御装置の一構成例について説明するための図である。
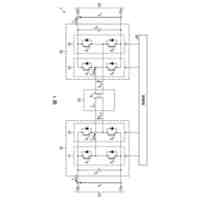
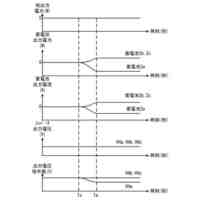
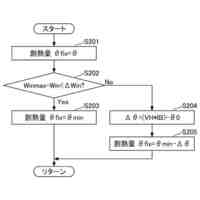
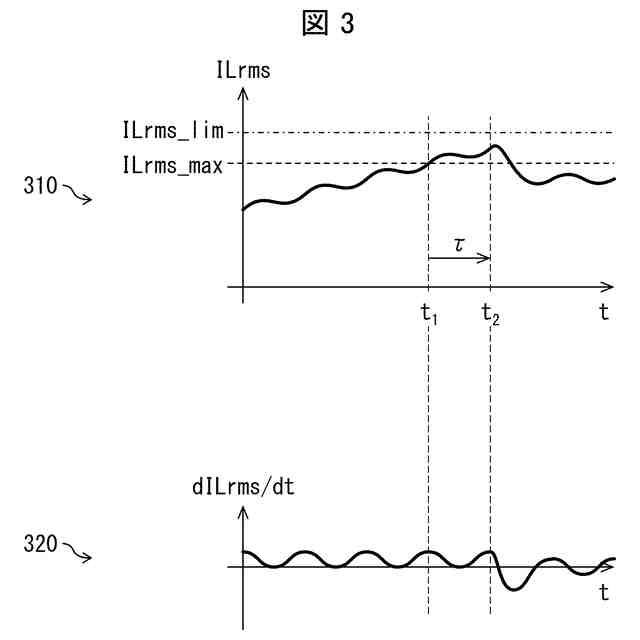
dILrms/dt制御について説明するための図である。
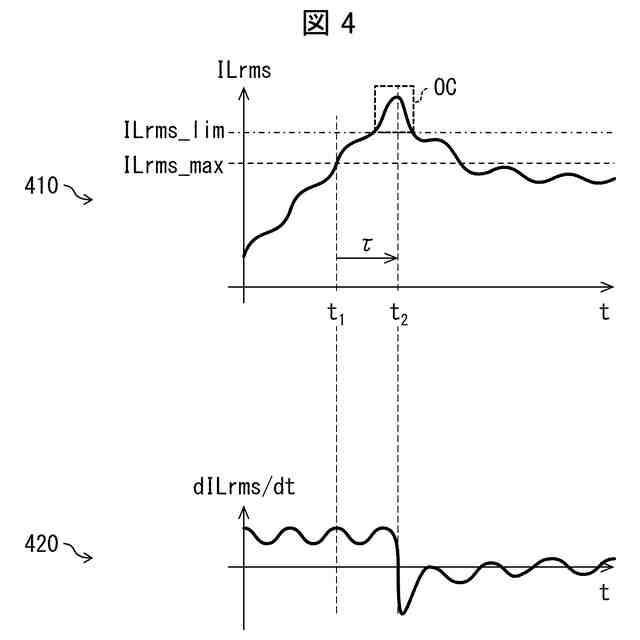
dILrms/dt制御について説明するための別の図である。
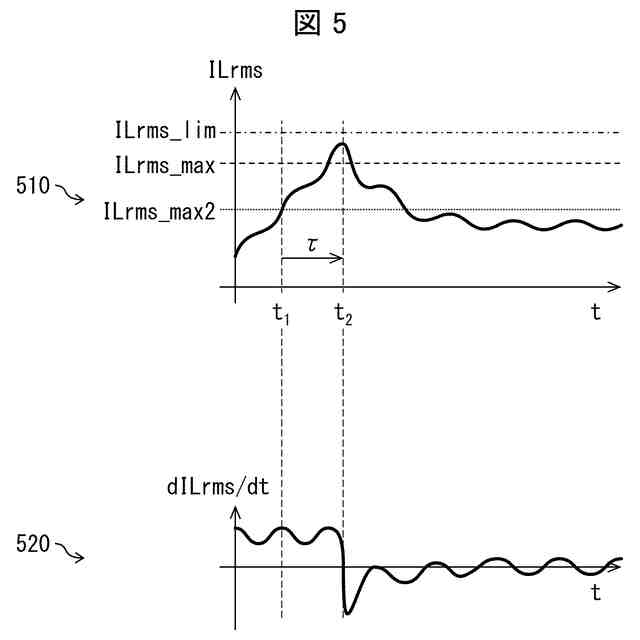
dILrms/dt制御について説明するためのさらに別の図である。
【発明を実施するための形態】
【0010】
〔実施形態1〕
実施形態1の負荷制御装置1について以下に説明する。説明の便宜上、実施形態1にて説明したコンポーネント(構成要素)と同じ機能を有するコンポーネントについては、以降の各実施形態では同じ符号を付し、その説明を繰り返さない。簡潔化のため、公知の技術事項についても説明を適宜省略する。本明細書において述べる各コンポーネントおよび各数値はいずれも、特に矛盾のない限り単なる例示である。それゆえ、例えば、特に矛盾のない限り、各コンポーネントの位置関係および接続関係は各図の例に限定されない。また、各図は必ずしもスケール通りに図示されていない。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
日新電機株式会社
遮断器システム
22日前
日新電機株式会社
遮断器システム
29日前
日新電機株式会社
DC-DCコンバータおよび制御方法
19日前
日新電機株式会社
ゲートバルブ、ゲートバルブ付きチャンバ及び化学蓄熱システム
9日前
個人
発電機
2日前
個人
高電荷低電位電荷搬送体
16日前
個人
ファスナー式コード束ね
17日前
株式会社豊田自動織機
回転電機
16日前
未来工業株式会社
ゲージ
16日前
個人
回転電気装置及び発電装置
18日前
株式会社コスメック
自立発電装置
18日前
株式会社アイシン
車両用駆動装置
10日前
株式会社豊田自動織機
回転電機のロータ
17日前
株式会社シマノ
電力供給装置
3日前
富士電機株式会社
半導体装置
2日前
株式会社ダイヘン
電力システム
4日前
株式会社浅羽製作所
通線用先端誘導具
9日前
トヨタ自動車株式会社
蓄電池制御装置
4日前
株式会社ダイヘン
蓄電池システム
9日前
高周波熱錬株式会社
電源装置
17日前
高周波熱錬株式会社
電源装置
17日前
日本航空電子工業株式会社
シール構造体
12日前
コーセル株式会社
スイッチング電源装置
16日前
ニデック株式会社
ステータ、モータ及びドローン
17日前
トヨタ自動車株式会社
充電制御装置
2日前
株式会社ミツバ
端子ユニット
16日前
GX株式会社
可搬式太陽光発電用電源装置
2日前
矢崎総業株式会社
グロメット
12日前
キヤノン株式会社
電源装置、画像形成装置
3日前
個人
同期回転電機
9日前
本田技研工業株式会社
回転電機
16日前
株式会社村田製作所
電源装置及びプログラム
18日前
マツダ株式会社
モータ
4日前
本田技研工業株式会社
回転電機
12日前
マツダ株式会社
モータ
4日前
株式会社ミツバ
モータ制御装置
16日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ