TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024103267
公報種別
公開特許公報(A)
公開日
2024-08-01
出願番号
2023007509
出願日
2023-01-20
発明の名称
作業機械の操作支援装置、作業機械および操作支援システム
出願人
国立大学法人広島大学
,
コベルコ建機株式会社
代理人
デロイトトーマツ弁理士法人
主分類
E02F
9/26 20060101AFI20240725BHJP(水工;基礎;土砂の移送)
要約
【課題】本発明は、アタッチメントの関節機構の出力余裕のオペレータによる認識精度の向上を図りうる装置等を提供する。
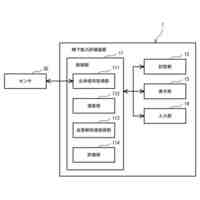
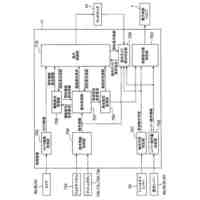
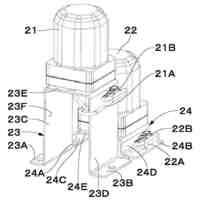
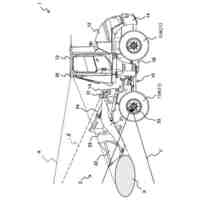
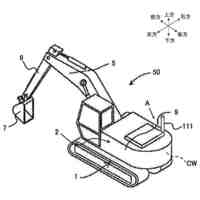
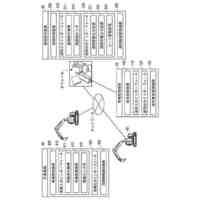
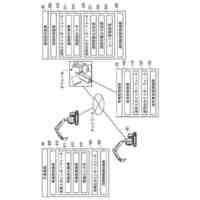
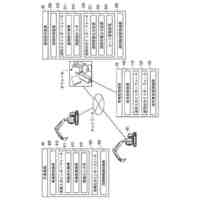
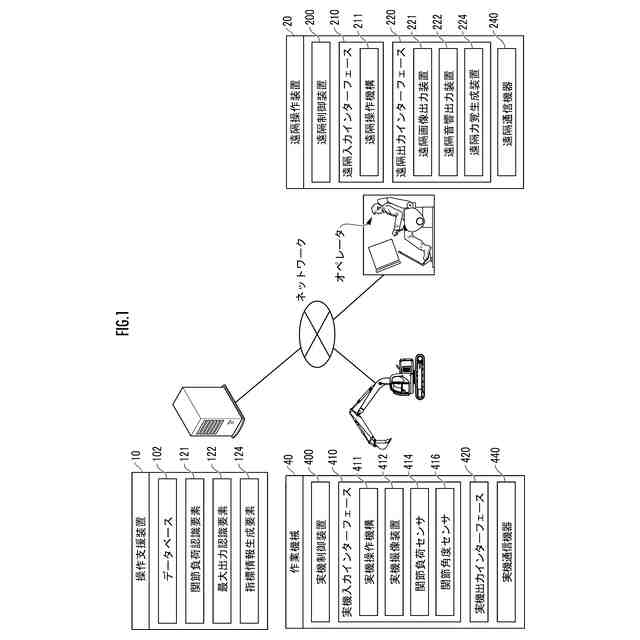
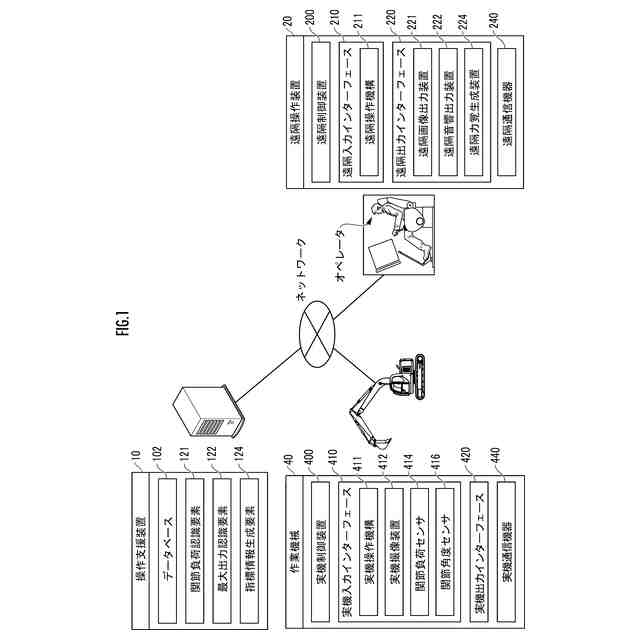
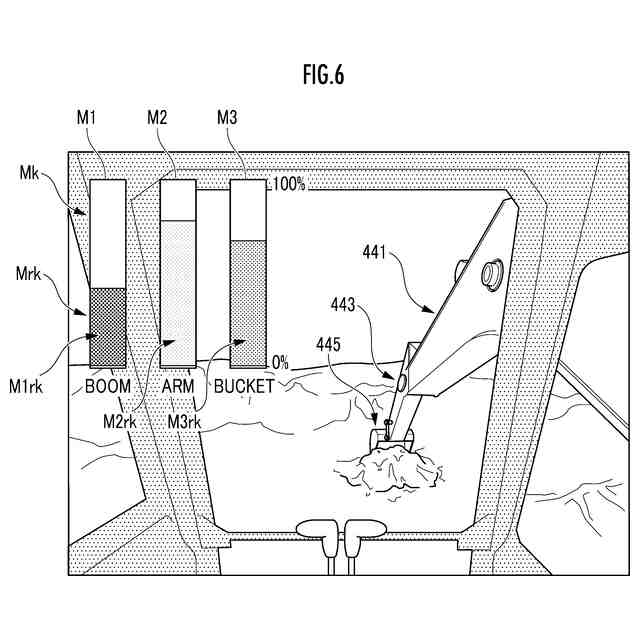
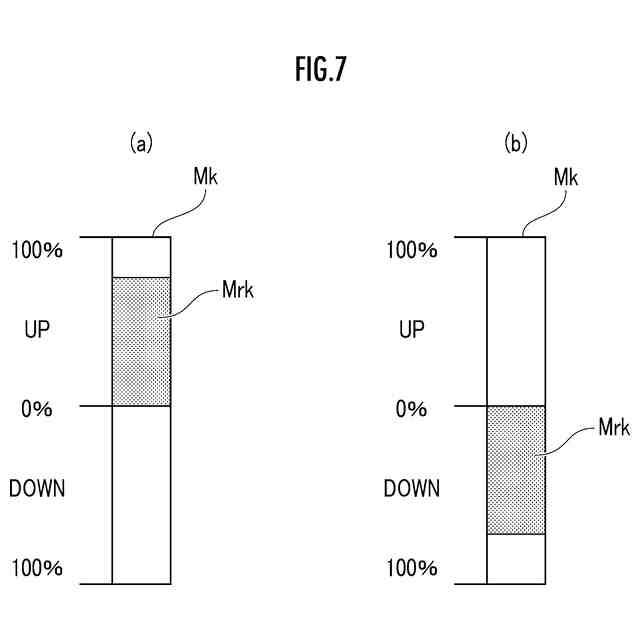
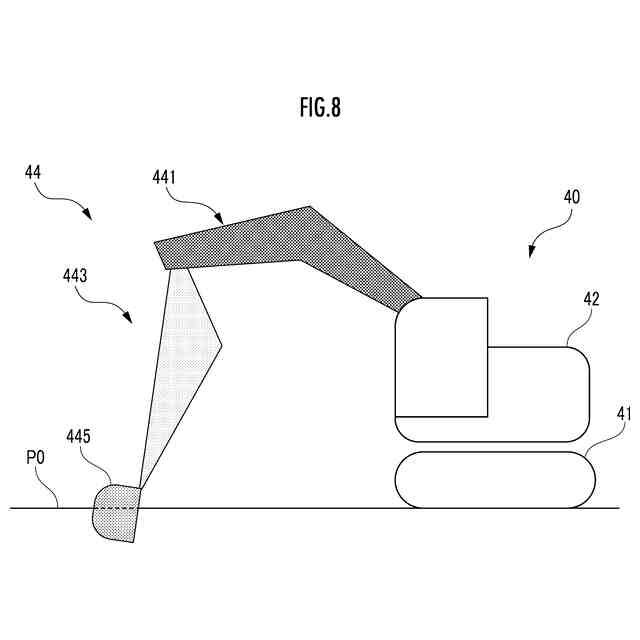
【解決手段】遠隔入力インターフェース210(出力機器)を通じて指標情報がオペレータに対して提供またはフィードバックされる。これにより、作業機構44(アタッチメント)の角関節機構の関節負荷率(負荷余裕度)を当該オペレータに視覚、聴覚および触覚のいずれか1つを通じて知覚させることができる。このため、関節機構の過負荷を回避する観点から、オペレータに適当に作業機械40を操作させることができ、ひいては当該作業機械40による作業機構44を用いた作業効率の向上が図られる。
【選択図】図1
特許請求の範囲
【請求項1】
作業機械のアタッチメントを構成する関節機構の負荷と、前記関節機構の角度の計測値に応じて定まる当該関節機構の最大出力と、に基づいて定まる前記関節機構の負荷余裕度を表わす指標情報を、前記作業機械を操作するオペレータに対して出力機器を通じて提供する
操作支援装置。
続きを表示(約 1,200 文字)
【請求項2】
請求項1に記載の操作支援装置において、
前記指標情報として、前記関節機構の最大出力に対する前記関節機構の負荷の比率である関節負荷率を、前記作業機械を操作するオペレータに前記出力機器を通じて提供する
操作支援装置。
【請求項3】
請求項1または2に記載の操作支援装置において、
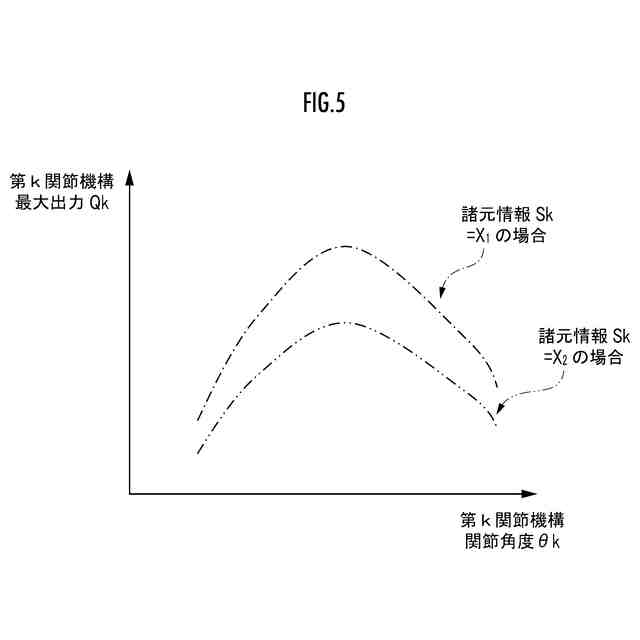
前記関節機構の関節角度の計測値に加えて、前記作業機械または前記アタッチメントの諸元を表わす諸元情報に基づいて当該関節機構の最大出力を定める
操作支援装置。
【請求項4】
請求項1または2に記載の操作支援装置において、
前記出力機器が、前記作業機械を操作するための操作レバーに、前記指標情報としての力を作用させる操作レバーアクチュエータにより構成されている
操作支援装置。
【請求項5】
請求項1又は2に記載の操作支援装置において、
入力機器を通じて設定された設定情報に基づいて、前記出力機器を通じて提供される前記指標情報を変調する
操作支援装置。
【請求項6】
請求項1または2に記載の操作支援装置において、
前記指標情報を、前記作業機械を遠隔操作する遠隔操作装置を構成する前記出力機器または当該遠隔操作装置に設けられた前記出力機器を通じて前記オペレータに対して提供する
操作支援装置。
【請求項7】
請求項6に記載の操作支援装置において、
前記遠隔操作装置は複数の前記作業機械を遠隔操作可能であり、当該複数の前記作業機械のうち前記遠隔操作装置により遠隔操作されている一の作業機械の前記指標情報を前記オペレータに対して前記出力機器を通じて提供する
操作支援装置。
【請求項8】
請求項6に記載の操作支援装置において、
前記作業機械の前記関節機構の関節角度の計測値に加えて、前記作業機械または前記アタッチメントの諸元を表わす諸元情報を、ネットワーク通信に基づいて認識し、認識した前記諸元情報に基づいて当該関節機構の最大出力を定める
操作支援装置。
【請求項9】
請求項1または2に記載の操作支援装置において、
前記出力機器が、前記指標情報としての指標画像を表示する画像出力装置により構成されている
操作支援装置。
【請求項10】
アタッチメントを構成する関節機構と、前記関節機構の負荷を計測する負荷計測器と、前記関節機構の角度を計測する角度計測器と、情報を提供可能な出力機器と、を備えた作業機械であって、
前記負荷計測器により計測される前記関節機構の負荷と、前記角度計測器により計測される前記関節機構の角度の計測値と、に基づいて定まる前記関節機構の負荷余裕度を表わす指標情報を、前記作業機械を操作するオペレータに対して前記出力機器を通じて提供する
作業機械。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、建設機械等の作業機械のオペレータによる操作を支援する装置に関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
クレーンなどの建設機械を構成するブームに実際に作用する力に基づいて操作レバーに反力を提示する技術が提案されている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開2021-042018号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、作業機械によっては、そのアタッチメントの姿勢の相違に応じて、当該アタッチメントの関節機構の最大出力が相違する。このため、アタッチメントの関節機構の負荷を操作レバーに単にフィードバックするだけでは、当該関節機構の最大出力までの出力余裕・マージンの大きさをオペレータに知覚させることができない。このため、例えば、アタッチメントが油圧駆動される場合、オペレータが予期せぬ段階で作動油圧が油圧回路を構成するリリーフバルブのリリーフ圧に到達してしまい、アタッチメントの駆動速度の低下など生産効率の低下を招く可能性がある。
【0005】
そこで、本発明は、アタッチメントの関節機構の出力余裕のオペレータによる認識精度の向上を図りうる装置等を提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明の操作支援装置は、
作業機械のアタッチメントを構成する関節機構の負荷と、前記関節機構の角度の計測値に応じて定まる当該関節機構の最大出力と、に基づいて定まる前記関節機構の負荷余裕度を表わす指標情報を、前記作業機械を操作するオペレータに対して出力機器を通じて提供する。
【0007】
当該構成の操作支援装置によれば、出力機器を通じて指標情報がオペレータに対して提供またはフィードバックされることにより、アタッチメントの関節機構の負荷余裕度を当該オペレータに知覚させることができる。このため、関節機構の過負荷を回避する観点から、オペレータに適当に作業機械を操作させることができ、ひいては当該作業機械によるアタッチメントを用いた作業効率の向上が図られる。
【0008】
本発明の操作支援装置において、
前記指標情報として、前記関節機構の最大出力に対する前記関節機構の負荷の比率である関節負荷率を、前記作業機械を操作するオペレータに前記出力機器を通じて提供する
ことが好ましい。
【0009】
当該構成の操作支援装置によれば、出力機器を通じて指標情報がオペレータに対して提供またはフィードバックされることにより、アタッチメントの関節機構の負荷余裕度を負荷余裕率の形態で当該オペレータに知覚させることができる。これにより、関節機構の関節角度に応じた最大出力の相違による負荷余裕度の変動幅が抑制されるので、その分だけ負荷余裕度をオペレータに的確に知覚させることができる。そして、関節機構の過負荷を回避する観点から、オペレータに適当に作業機械を操作させることができ、ひいては当該作業機械によるアタッチメントを用いた作業効率の向上が図られる。
【0010】
本発明の操作支援装置において、
前記関節機構の関節角度の計測値に加えて、前記作業機械または前記アタッチメントの諸元を表わす諸元情報に基づいて当該関節機構の最大出力を定める
ことが好ましい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
国立大学法人広島大学
嚥下能力評価装置及びプログラム
7日前
アース製薬株式会社
口内炎発症抑制組成物
26日前
大陽日酸株式会社
膜分離装置および膜分離方法
今日
株式会社キャタラー
導電性金属酸化物粒子及び電気化学反応用触媒粒子
19日前
国立大学法人広島大学
水溶性タンパク質内包用のホウ素ナノキャリア及びホウ素ナノキャリア複合体
8日前
株式会社トクヤマ
防曇材料、硬化体、積層体、光学物品、レンズ、及び眼鏡
27日前
大阪瓦斯株式会社
シスプラチンに起因する腎障害の予防のための経口投与用の組成物
6日前
国立大学法人広島大学
分散型データアグリゲーション方法および分散型データアグリゲーションフレームワーク
今日
日立建機株式会社
作業機械
1日前
日立建機株式会社
走行装置
2日前
日立建機株式会社
建設機械
1日前
末広産業株式会社
水路用型枠ユニット
今日
日立建機株式会社
作業機械
今日
株式会社熊谷組
山留めアンカーの位置測量方法
1日前
日立建機株式会社
作業機械
今日
住友建機株式会社
ショベル、ショベルの制御装置
今日
株式会社日立建機ティエラ
建設機械
今日
株式会社日立建機ティエラ
掘削バケット
2日前
日立建機株式会社
作業機械
今日
日立建機株式会社
作業機械
今日
株式会社日立建機ティエラ
作業車両
1日前
日立建機株式会社
作業機械の制御装置
2日前
日立建機株式会社
建設機械
1日前
日立建機株式会社
建設機械
今日
ユニチカトレーディング株式会社
井桁枠の角に挿入鉄筋を配設する方法
1日前
コベルコ建機株式会社
操作装置および操作システム
今日
株式会社小松製作所
作業機械および作業機械の制御方法
1日前
大和ハウス工業株式会社
ブロック積上げ構造物の基礎施工方法および支持部材
1日前
コベルコ建機株式会社
操作装置および操作システム
今日
コベルコ建機株式会社
操作装置および操作システム
今日
日立建機株式会社
作業機械のドリンクホルダ
今日
大和ハウス工業株式会社
基礎杭の杭頭部の補強用鉄筋籠および基礎杭の杭頭部の補強方法
今日
コベルコ建機株式会社
作業支援システム、作業機械、および作業支援プログラム
1日前
株式会社進富
鋼管矢板、鋼管矢板連結構造およびヤットコ
今日
三谷セキサン株式会社
鋼管で被覆したコンクリート製の既製杭、基礎杭構造
今日
大和ハウス工業株式会社
掘削治具、これを用いた基礎杭の補強方法、および杭構造
5日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ