TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024085978
公報種別
公開特許公報(A)
公開日
2024-06-27
出願番号
2022200813
出願日
2022-12-16
発明の名称
地図評価装置
出願人
本田技研工業株式会社
代理人
個人
,
個人
主分類
G08G
1/01 20060101AFI20240620BHJP(信号)
要約
【課題】自車両の走行時における地図生成を効率的に行う。
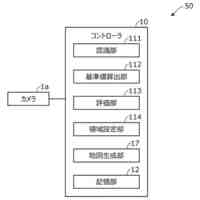
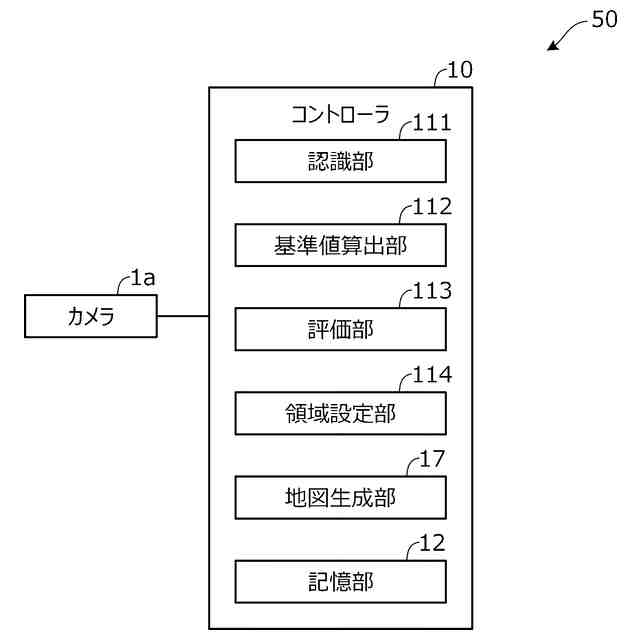
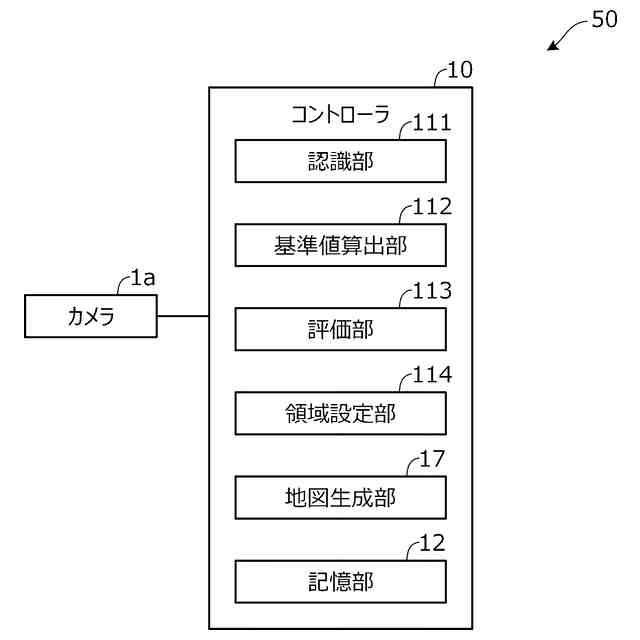
【解決手段】地図評価装置50は、自車両の周囲の外部状況を認識する認識部111と、認識部111の認識結果を含む認識情報を記憶する記憶部12と、認識部111の認識結果に基づき地図を生成する地図生成部17と、記憶部12に記憶された認識情報に基づいて、地図の評価に用いる評価基準値を算出する基準値算出部112と、評価基準値の算出に用いられた認識情報の評価基準値に対する偏差に基づいて地図の信頼度を算出する評価部113と、を備える。
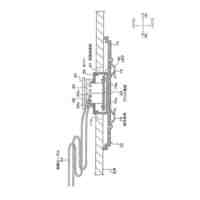
【選択図】図3
特許請求の範囲
【請求項1】
自車両の周囲の外部状況を認識する認識部と、
前記認識部の認識結果を含む認識情報を記憶する記憶部と、
前記認識部の認識結果に基づき地図を生成する地図生成部と、
前記記憶部に記憶された前記認識情報に基づいて、前記地図の評価に用いる評価基準値を算出する基準値算出部と、
前記評価基準値の算出に用いられた前記認識情報の前記評価基準値に対する偏差に基づいて前記地図の信頼度を算出する信頼度算出部と、を備えることを特徴とする地図評価装置。
続きを表示(約 1,600 文字)
【請求項2】
請求項1に記載の地図評価装置において、
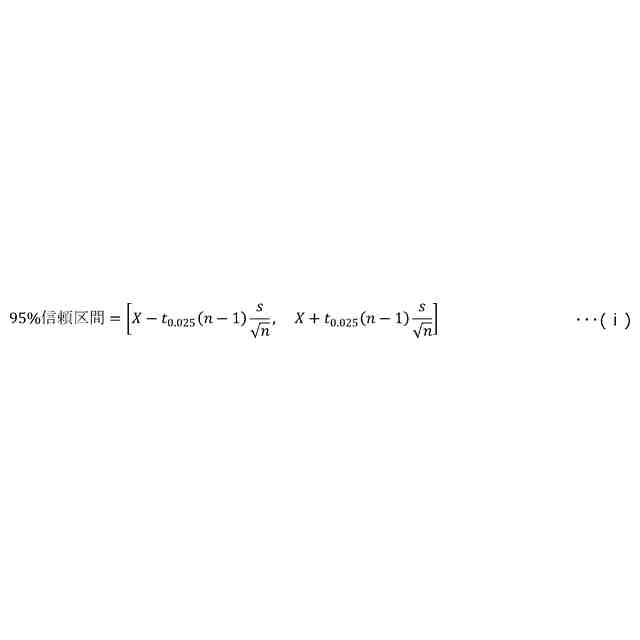
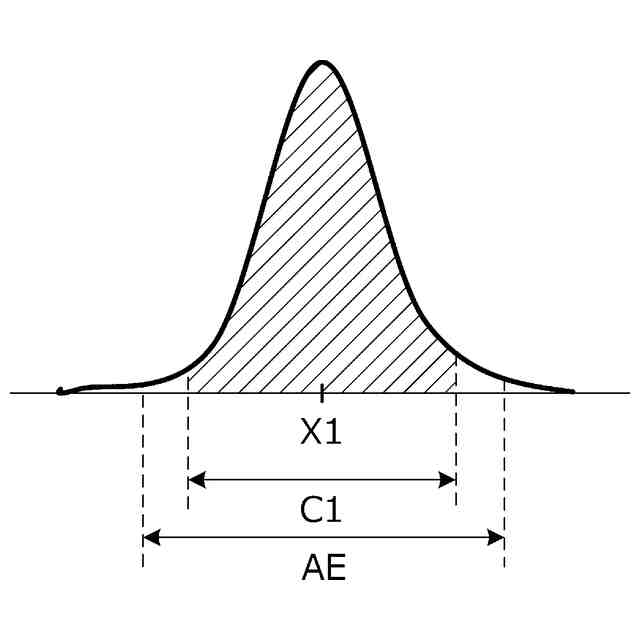
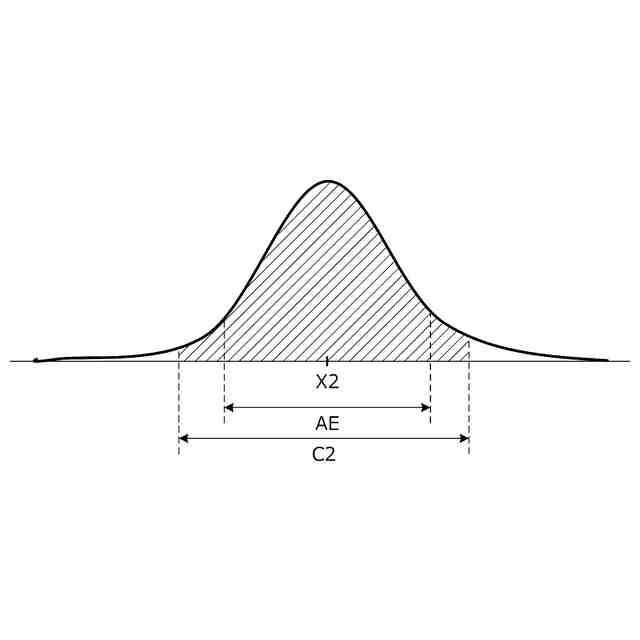
前記信頼度算出部は、前記評価基準値の算出に用いられた前記認識情報のサンプル数と該認識情報の前記評価基準値に対する偏差のばらつき度合いとに基づき、前記評価基準値に対する信頼区間の幅を前記信頼度として算出することを特徴とする地図評価装置。
【請求項3】
請求項1または2に記載の地図評価装置において、
前記自車両は、自動運転機能または運転支援機能を有する車両であって、前記地図生成部により生成された前記地図に基づいて自律走行可能であり、
前記地図評価装置は、前記信頼度算出部により算出された前記信頼度に基づいて、前記自律走行に前記地図を利用可能であるか否かを判定する判定部をさらに備え、
前記判定部は、前記信頼度が所定程度以上であるとき、前記自律走行に前記地図を利用可能であると判定することを特徴とする地図評価装置。
【請求項4】
請求項1または2に記載の地図評価装置において、
前記信頼度算出部により算出された前記信頼度に基づき、前記自車両の自動運転レベルを設定する運転レベル設定部をさらに備えることを特徴とする地図評価装置。
【請求項5】
請求項1または2に記載の地図評価装置において、
前記認識部は、前記自車両の周囲の物体を認識し、
前記地図生成部は、前記認識部の認識結果に基づき前記物体の情報を含む前記地図を生成し、
前記記憶部は、前記物体の認識位置を含む前記認識情報を記憶し、
前記基準値算出部は、前記認識情報により示される前記認識位置の平均値を前記評価基準値として算出し、
前記信頼度算出部は、前記評価基準値の算出に用いられた前記認識位置の前記評価基準値に対する偏差に基づいて前記地図の前記信頼度を算出することを特徴とする地図評価装置。
【請求項6】
請求項1または2に記載の地図評価装置において、
評価対象領域を設定する領域設定部をさらに備え、
前記認識部は、前記自車両が走行する道路の区画線を認識し、
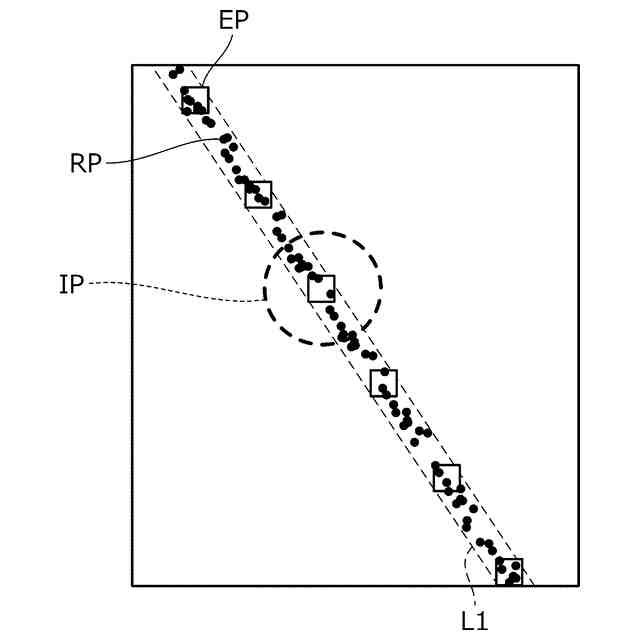
前記地図生成部は、前記認識部の認識結果に基づき前記区画線の情報を含む前記地図を生成し、
前記記憶部は、前記区画線の前記道路の延在方向および幅方向の認識位置を含む前記認識情報を記憶し、
前記領域設定部は、前記地図上における前記区画線上に前記評価対象領域を設定し、
前記基準値算出部は、前記延在方向の認識位置が前記評価対象領域に含まれる前記認識情報を前記記憶部から取得し、取得した前記認識情報により示される前記幅方向の認識位置の平均値を前記評価基準値として算出し、
前記信頼度算出部は、前記評価基準値の算出に用いられた前記幅方向の認識位置の前記評価基準値に対する偏差に基づいて前記地図の前記信頼度を算出することを特徴とする地図評価装置。
【請求項7】
請求項6に記載の地図評価装置において、
前記領域設定部は、前記地図上における前記区画線上に所定の間隔で複数の前記評価対象領域を設定することを特徴とする地図評価装置。
【請求項8】
請求項7に記載の地図評価装置において、
前記記憶部は、さらに前記信頼度算出部により算出された前記地図の前記信頼度を記憶し、
前記領域設定部は、前記道路に設定された前記評価対象領域どうしの間隔を、前記記憶部に記憶された前記評価対象領域の前記地図の前記信頼度に基づき変更することを特徴とする地図評価装置。
【請求項9】
請求項7に記載の地図評価装置において、
前記領域設定部は、前記道路に設定された前記評価対象領域どうしの間隔を、前記道路の属性に基づき変更することを特徴とする地図評価装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、地図情報の精度を評価する地図評価装置に関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
従来より、車載カメラにより取得された撮像画像を解析して、自車両が走行した道路の状況を認識するようにした装置が知られている(例えば特許文献1参照)。特許文献1記載の装置は、地図データに基づき生成された目的地までの案内ルートから自車両が逸脱したとき、認識した道路状況に基づき地図データの誤りの内容を判断する。
【先行技術文献】
【特許文献】
【0003】
特開2010-223901号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上記特許文献1記載の装置のように、自車両が案内ルートを逸脱したときに地図データの誤りを検出するようにしたのでは、地図データを効率的に評価できない。
【課題を解決するための手段】
【0005】
本発明の一態様である地図評価装置は、自車両の周囲の外部状況を認識する認識部と、認識部の認識結果を含む認識情報を記憶する記憶部と、認識部の認識結果に基づき地図を生成する地図生成部と、記憶部に記憶された認識情報に基づいて、地図の評価に用いる評価基準値を算出する基準値算出部と、評価基準値の算出に用いられた認識情報の評価基準値に対する偏差に基づいて地図の信頼度を算出する信頼度算出部と、を備える。
【発明の効果】
【0006】
本発明によれば、地図情報を適切に評価する。
【図面の簡単な説明】
【0007】
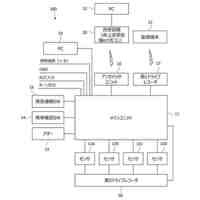
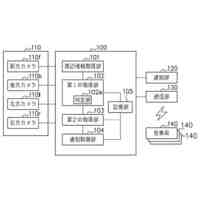
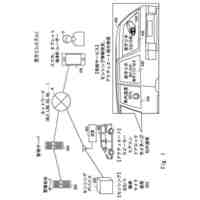
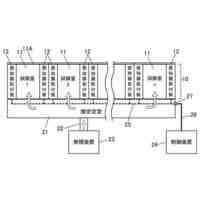
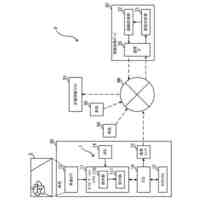
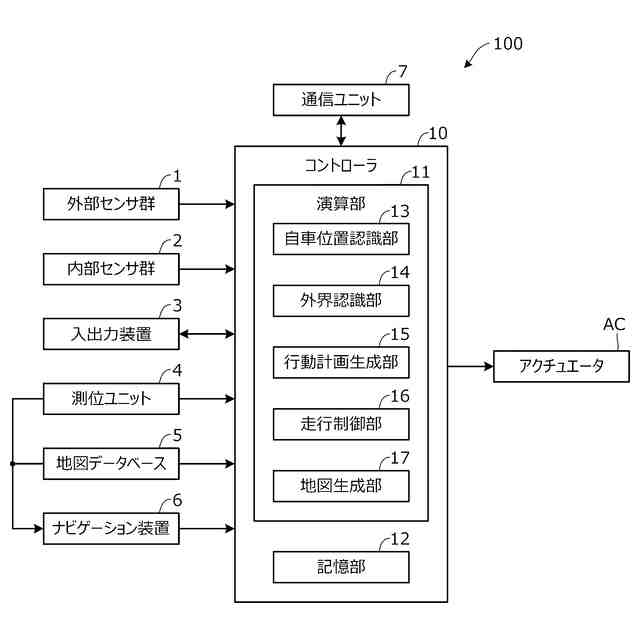
本発明の実施形態に係る地図評価装置を有する車両制御システムの全体構成を概略的に示すブロック図。
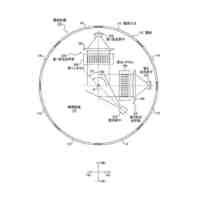
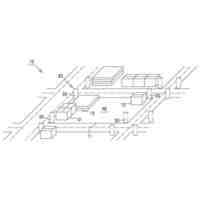
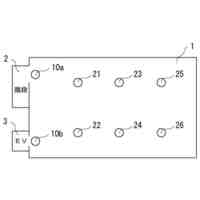
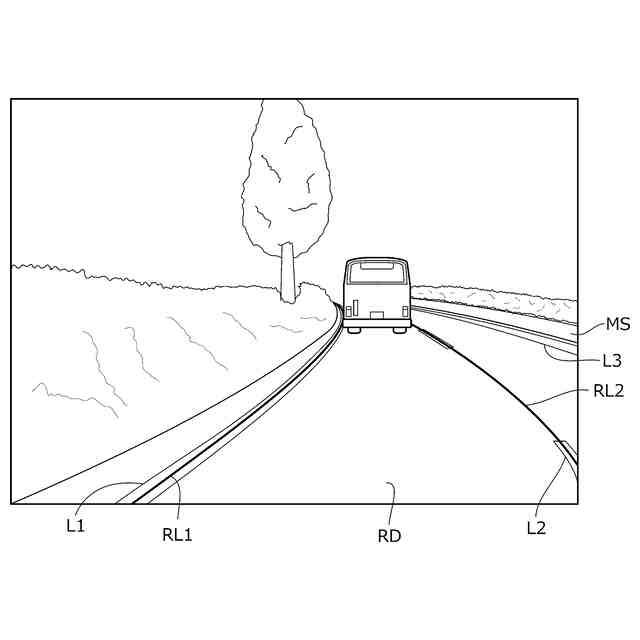
地図に含まれる区画線の情報を模式的に示す図。
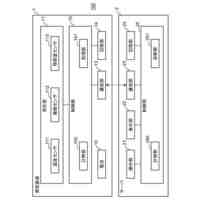
本発明の実施形態に係る地図評価装置の要部構成を示すブロック図。
図1の区画線の認識結果を含む認識情報の一例を示す図。
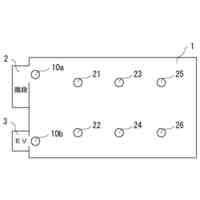
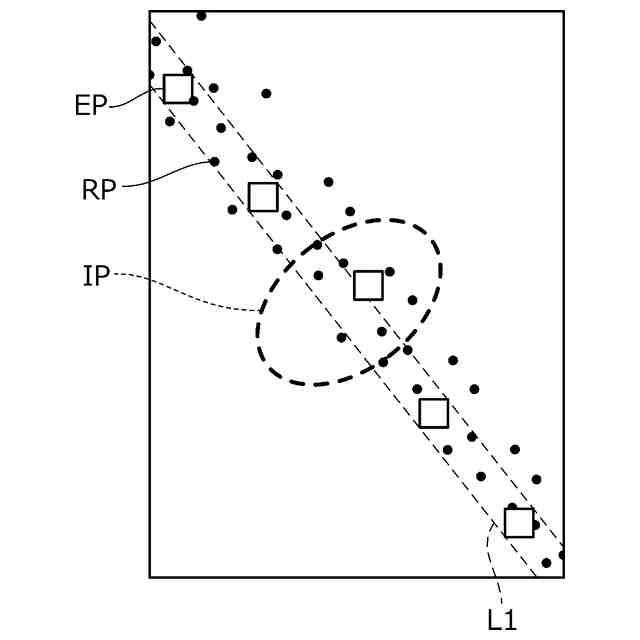
図1の区画線の認識結果を含む認識情報の他の例を示す図。
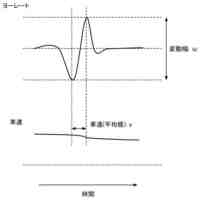
評価基準値に対する信頼区間を説明するための図。
評価基準値に対する信頼区間を説明するための図。
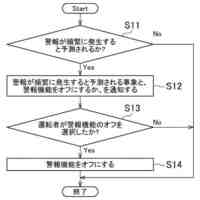
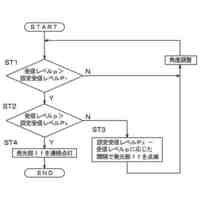
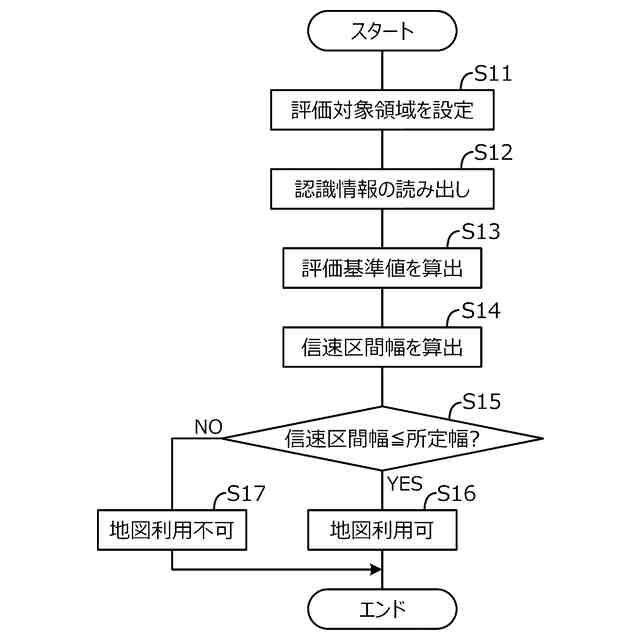
図3のコントローラで実行される処理の一例を示すフローチャート。
【発明を実施するための形態】
【0008】
以下、図1~図6を参照して本発明の実施形態について説明する。本発明の実施形態に係る地図評価装置は、例えば自動運転機能を有する車両、すなわち自動運転車両に搭載される。なお、本実施形態に係る地図評価装置が搭載される車両を、他車両と区別して自車両と呼ぶことがある。自車両は、内燃機関(エンジン)を走行駆動源として有するエンジン車両、走行モータを走行駆動源として有する電気自動車、エンジンと走行モータとを走行駆動源として有するハイブリッド車両のいずれであってもよい。自車両は、ドライバによる運転操作が不要な自動運転モードでの走行だけでなく、ドライバの運転操作による手動運転モードでの走行も可能である。
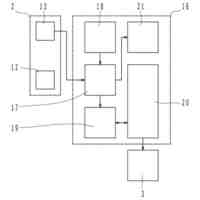
【0009】
まず、自動運転に係る自車両の概略構成について説明する。図1は、本発明の実施形態に係る地図評価装置を有する自車両の車両制御システム100の全体構成を概略的に示すブロック図である。図1に示すように、車両制御システム100は、コントローラ10と、コントローラ10にそれぞれ通信可能に接続された外部センサ群1と、内部センサ群2と、入出力装置3と、測位ユニット4と、地図データベース5と、ナビゲーション装置6と、通信ユニット7と、走行用のアクチュエータACとを主に有する。
【0010】
外部センサ群1は、自車両の周辺情報である外部状況を検出する複数のセンサ(外部センサ)の総称である。例えば外部センサ群1には、自車両の全方位の照射光に対する散乱光を測定して自車両から周辺の障害物までの距離を測定するライダ、電磁波を照射し反射波を検出することで自車両の周辺の他車両や障害物等を検出するレーダ、自車両に搭載され、CCDやCMOS等の撮像素子を有して自車両の周辺(前方、後方および側方)を撮像するカメラなどが含まれる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
防犯装置
1か月前
個人
非常放送システム
2か月前
個人
バス送迎支援システム
2か月前
個人
降車漏れ通報システム
10日前
株式会社ユピテル
システム等
1か月前
スズキ株式会社
運転支援装置
1か月前
スズキ株式会社
車線案内装置
1か月前
スズキ株式会社
運転支援装置
1か月前
株式会社ミヤワキ
測定装置
21日前
ホーチキ株式会社
煙感知器
11日前
ホーチキ株式会社
煙感知器
11日前
上田技研産業株式会社
音発出装置
今日
能美防災株式会社
警報器
3か月前
中国電力株式会社
安全管理システム
1か月前
能美防災株式会社
表示灯
2か月前
トヨタ自動車株式会社
遠隔操作装置
1か月前
トヨタ自動車株式会社
運転診断装置
今日
トヨタ自動車株式会社
見守りシステム
今日
ニッタン株式会社
情報発信装置
25日前
株式会社アガタ
閉空間監視装置
2か月前
オクト産業株式会社
自動車用安全装置
24日前
ニッタン株式会社
感度試験装置
2か月前
トヨタ自動車株式会社
制御装置
2か月前
ホーチキ株式会社
感知器ベース
4日前
能美防災株式会社
火災感知器
1か月前
株式会社デンソーウェーブ
監視システム
1か月前
株式会社SUBARU
車両管理システム
4日前
トヨタ自動車株式会社
情報収集システム
2か月前
株式会社京三製作所
車両検出装置
2か月前
ホーチキ株式会社
防災盤の筐体構造
21日前
トヨタ自動車株式会社
運転支援装置
2か月前
本田技研工業株式会社
地図評価装置
4日前
竹中エンジニアリング株式会社
緊急呼出システム
3か月前
竹中エンジニアリング株式会社
緊急呼出システム
3か月前
トヨタ自動車株式会社
映像処理方法
11日前
ニッタン株式会社
火災報知システム
21日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ