TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024085019
公報種別
公開特許公報(A)
公開日
2024-06-26
出願番号
2022199318
出願日
2022-12-14
発明の名称
車両制御装置
出願人
トヨタ自動車株式会社
代理人
弁理士法人プロスペック特許事務所
主分類
G08G
1/09 20060101AFI20240619BHJP(信号)
要約
【目的】 安全性を向上させた車両制御装置を提供する。
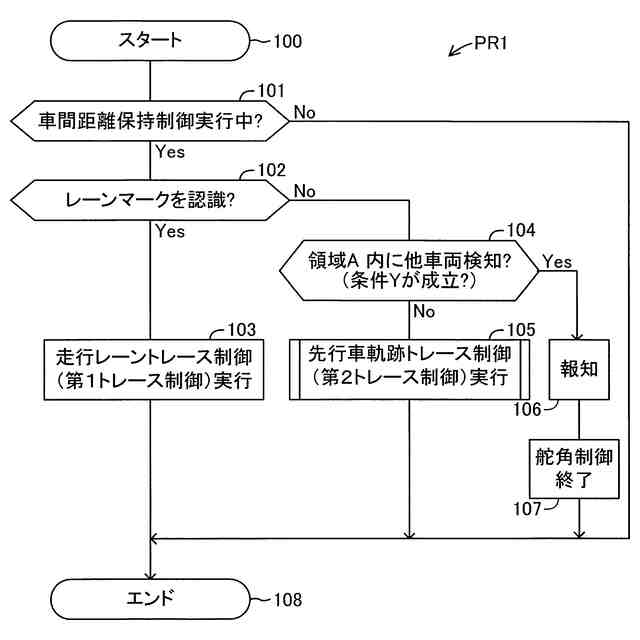
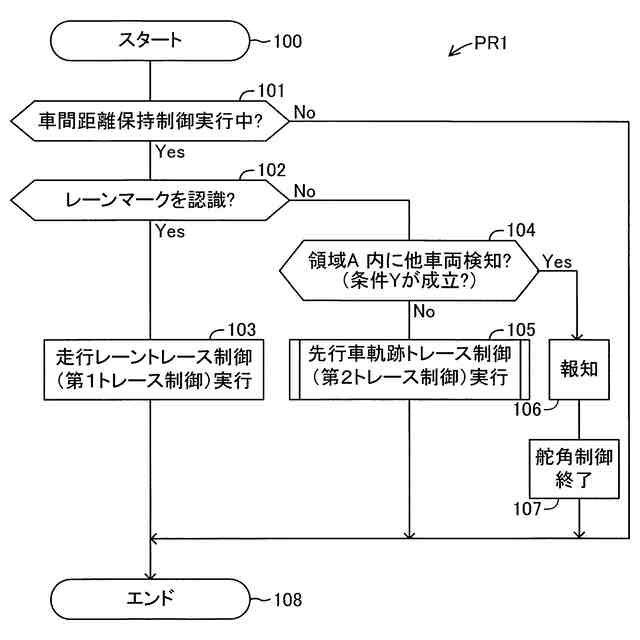
【解決手段】車両制御訴追1は、車載センサから取得した情報に基づいて、自車両が走行している走行レーンを認識し、前記走行レーンに沿って自車両が進行するように自車両を制御する第1トレース処理を実行可能であり、前記第1トレース処理を実行中に前記走行レーンを認識できなくなった状況下で自車両の前方を走行している先行車両が存在する場合に、前記先行車両の軌跡に沿って自車両が進行するように自車両を制御する。車両制御装置1は、自車両に対して並走している他車両が存在する可能性がある場合に、前記第2トレース制御を実行しない。
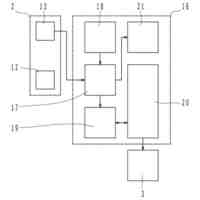
【選択図】 図3
特許請求の範囲
【請求項1】
自車両の周囲に存在する物標に関する情報及び自車両の走行状態に関する情報を取得する車載センサと、
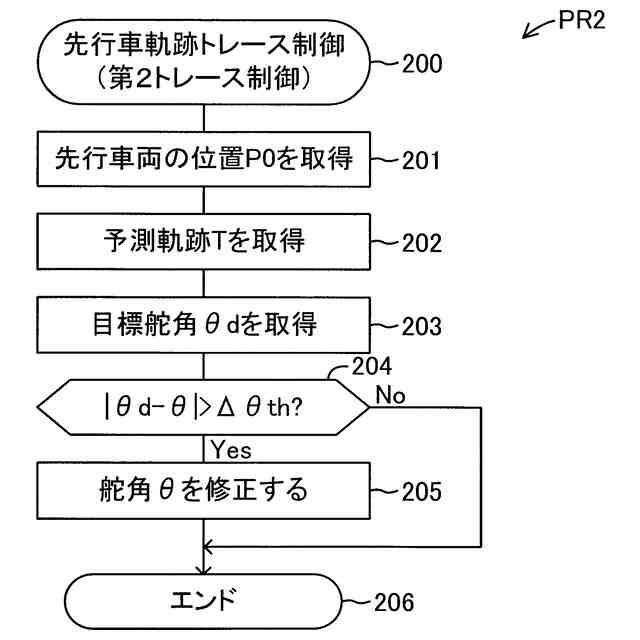
前記車載センサから取得した情報に基づいて、自車両が走行している走行レーンを認識し、前記走行レーンに沿って自車両が進行するように自車両を制御する第1トレース制御を実行可能であり、前記第1トレース制御を実行中に前記走行レーンを認識できなくなった状況下で自車両の前方を走行している先行車両が存在する場合に、前記先行車両の軌跡に沿って自車両が進行するように自車両を制御する第2トレース制御を実行可能なプロセッサと、
を備えた車両制御装置であって、
前記プロセッサは、自車両に対して並走している他車両が存在する可能性がある場合に、前記第2トレース制御を実行しない、ように構成された、車両制御装置。
続きを表示(約 530 文字)
【請求項2】
請求項1に記載の車両制御装置において、
前記プロセッサは、前記車載センサから取得した情報に基づいて、自車両の側方を含む所定の範囲に位置する他車両を検知した場合に、自車両に対して並走している他車両が存在する可能性があると判定する、車両制御装置。
【請求項3】
請求項1に記載の車両制御装置において、
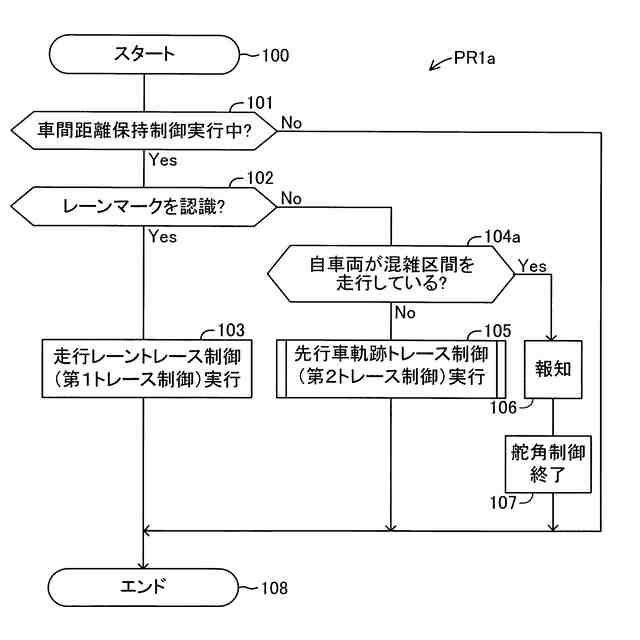
前記プロセッサは、自車両が混雑区間を走行中であると判定した場合に、自車両に対して並走している他車両が存在する可能性があると判定する、車両制御装置。
【請求項4】
請求項1に記載の車両制御装置において、
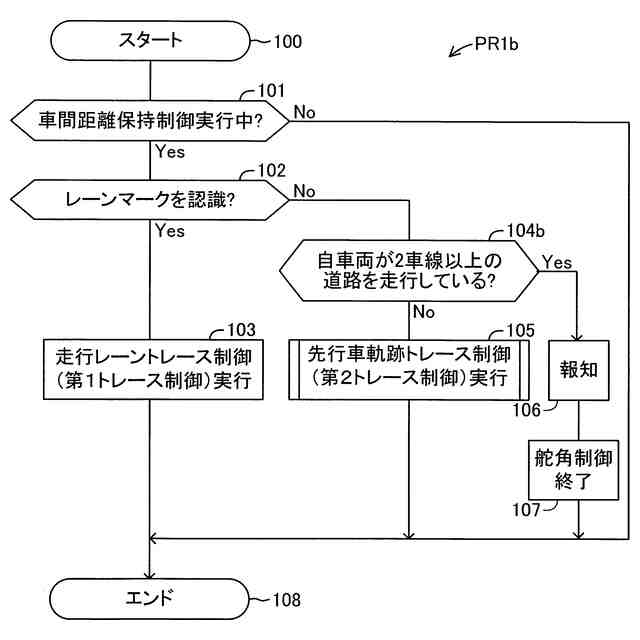
前記プロセッサは、車載センサは、自車両の進行方向の車線数が2車線以上の道路を自車両が走行している場合に、自車両に対して並走している他車両が存在する可能性があると判定する、車両制御装置。
【請求項5】
請求項1乃至請求項4のうちのいずれか1つに記載の車両制御装置において、
前記プロセッサは、
前記走行レーンを認識できなくなった状況下で、自車両に対して並走している他車両が存在する可能性があると判定した場合に、自車両の制御を中止する、車両制御装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、自車両を走行レーンに沿って走行させる車両制御装置に関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
自車両を走行レーンに沿って走行させる車両制御装置が提案されている(例えば、下記特許文献1を参照。)。特許文献1の車両制御装置は、カメラ及びプロセッサを含む。カメラは、車両の前景を逐次撮影して、画像データを取得する。プロセッサは、画像データを解析して、自車両が走行している走行レーン及び当該走行レーンの幅方向における自車両の位置を認識する。そして、プロセッサは、当該認識結果に基づいて、自車両が走行レーンに沿って走行するように自車両(操舵装置)を制御する。
【0003】
走行レーンを区画する区画線が描画されていない区間(例えば交差点)、区画線が不鮮明である区間、路面に雪が積もっている区間などを、特許文献1の車両制御装置が搭載された車両が走行している状況下では、プロセッサが走行レーンを認識できない場合がある。この場合に、先行車両の軌跡に沿って自車両が進行するように自車両を制御する車両制御装置が提案されている(例えば、下記特許文献2を参照。)。特許文献2の車両制御装置は、走行レーンを認識している場合には、認識した走行レーンに基づいて自車両を制御し、走行レーンを認識していない場合には、先行車両の軌跡に基づいて自車両を制御する。
【先行技術文献】
【特許文献】
【0004】
特開2013―097714号公報
特開2020―050086号公報
【発明の概要】
【0005】
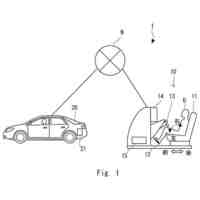
特許文献2に記載の車両制御装置は、先行車両の軌跡に基づいて自車両を制御しているときに先行車両が横位置を変化するように走行した場合、自車両も先行車両と同様に横位置が変化するように、自車両を制御する。この場合、自車両に対して並走している他車両に自車両が接近又は接触する虞がある。例えば、区画線が表示されていない交差点に自車両が進入する際に、特許文献2に記載の車両制御装置は先行車両の軌跡に基づいて自車両の走行を制御する。このとき先行車両が交差点内で横位置を変化させ、交差点を超えた後に今まで走行していた走行レーンに隣接する走行レーンに進入することがある。このような場合に自車両が先行車両に追従すると、最初から隣接レーンを走行している並走車両に自車両が接近又は接触する虞がある。
【0006】
本発明の目的の一つは、自車両の安全性を向上させることができる車両制御装置を提供することである。
【0007】
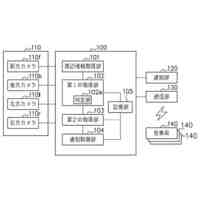
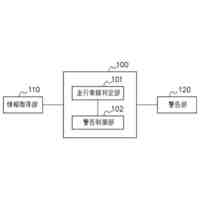
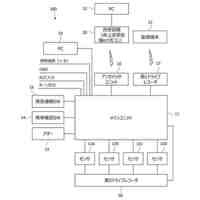
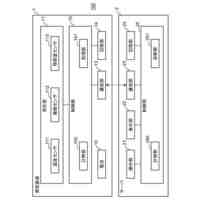
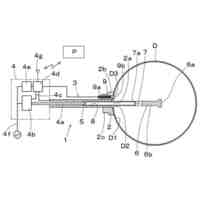
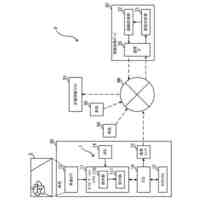
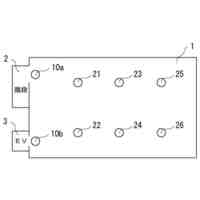
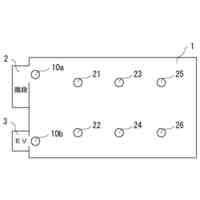
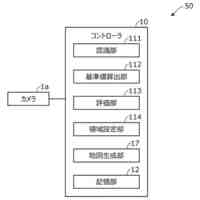
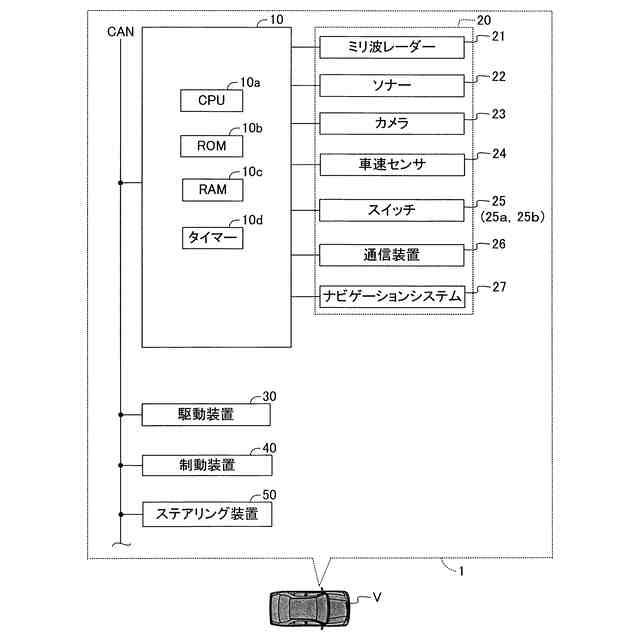
上記の目的を達成するために、本発明の車両制御装置(1)は、
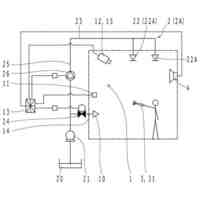
自車両(V)の周囲に存在する物標に関する情報及び自車両の走行状態に関する情報を取得する車載センサ(20)と、
前記車載センサから取得した情報に基づいて、自車両が走行している走行レーンを認識し、前記走行レーンに沿って自車両が進行するように自車両を制御する第1トレース制御を実行可能であり、前記第1トレース制御を実行中に前記走行レーンを認識できなくなった状況下で自車両の前方を走行している先行車両(V0)が存在する場合に、前記先行車両の軌跡に沿って自車両が進行するように自車両を制御する第2トレース制御を実行可能なプロセッサ(10)と、
を備える。
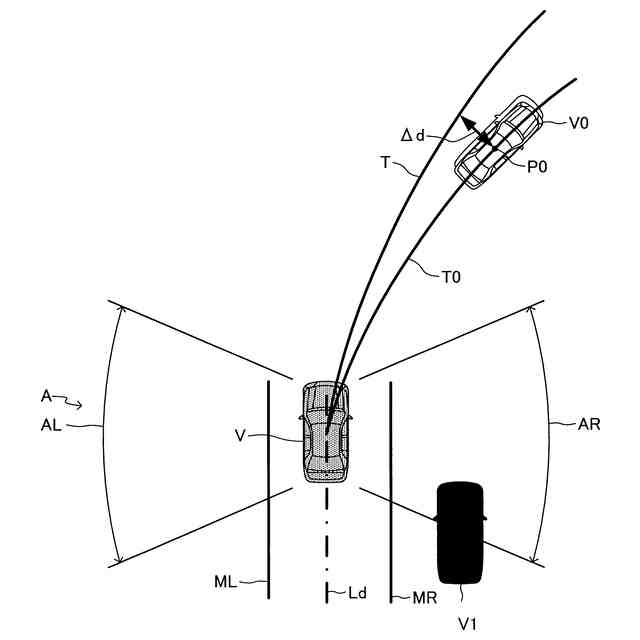
前記プロセッサは、自車両に対して並走している他車両(V1)が存在する可能性がある場合に、前記第2トレース制御を実行しない、ように構成される。
【0008】
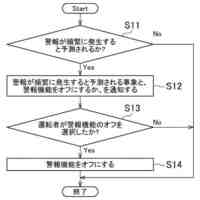
本発明によれば、自車両に対して並走している他車両(並走他車両)が存在する可能性がある場合にプロセッサは、先行車両の軌跡に沿って自車両が進行するように自車両を制御する第2トレース制御を実行しない。よって、並走他車両が存在する可能性があるときに第2トレース制御を実行することによって自車両が並走他車両に接近或いは接触することを抑制できる。このため自車両の安全性を向上させることができる。
【0009】
本発明の一態様に係る車両制御装置において、
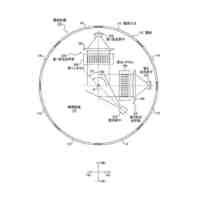
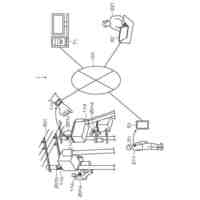
前記プロセッサは、前記車載センサから取得した情報に基づいて、自車両の側方を含む所定の範囲(A)に位置する他車両を検知した場合に、自車両に対して並走している他車両(V1)が存在する可能性があると判定する。
【0010】
車載センサから取得した情報に基づいて、自車両の周囲の所定範囲に位置する他車両を検知した場合、検知した他車両が並走他車両である可能性が極めて高い。プロセッサは、このような場合に第2トレース制御を実行しないため、自車両の安全性を向上させることができる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
防犯装置
29日前
個人
非常放送システム
2か月前
個人
バス送迎支援システム
2か月前
個人
降車漏れ通報システム
8日前
スズキ株式会社
運転支援装置
1か月前
スズキ株式会社
車線案内装置
1か月前
株式会社ユピテル
システム等
1か月前
スズキ株式会社
運転支援装置
1か月前
ホーチキ株式会社
煙感知器
9日前
ホーチキ株式会社
煙感知器
9日前
株式会社ミヤワキ
測定装置
19日前
トヨタ自動車株式会社
遠隔操作装置
1か月前
能美防災株式会社
表示灯
2か月前
能美防災株式会社
警報器
3か月前
中国電力株式会社
安全管理システム
1か月前
ホーチキ株式会社
感知器ベース
2日前
オクト産業株式会社
自動車用安全装置
22日前
ニッタン株式会社
情報発信装置
23日前
トヨタ自動車株式会社
制御装置
1か月前
株式会社アガタ
閉空間監視装置
2か月前
ニッタン株式会社
感度試験装置
2か月前
株式会社京三製作所
車両検出装置
2か月前
株式会社SUBARU
車両管理システム
2日前
能美防災株式会社
火災感知器
1か月前
株式会社デンソーウェーブ
監視システム
1か月前
トヨタ自動車株式会社
情報収集システム
2か月前
ニッタン株式会社
火災報知システム
19日前
ユニット株式会社
人感センサー音声警報器
2か月前
竹中エンジニアリング株式会社
緊急呼出システム
2か月前
トヨタ自動車株式会社
映像処理方法
9日前
ホーチキ株式会社
防災盤の筐体構造
19日前
竹中エンジニアリング株式会社
緊急呼出システム
2か月前
トヨタ自動車株式会社
運転支援装置
2か月前
本田技研工業株式会社
地図評価装置
2日前
能美防災株式会社
防犯用放水設備
19日前
トヨタ自動車株式会社
運転手推定装置
26日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ