TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024063155
公報種別
公開特許公報(A)
公開日
2024-05-10
出願番号
2024031643,2021156439
出願日
2024-03-01,2021-09-27
発明の名称
移動体、画像処理方法、およびコンピュータプログラム
出願人
キヤノン株式会社
代理人
個人
,
個人
,
個人
主分類
H04N
23/90 20230101AFI20240501BHJP(電気通信技術)
要約
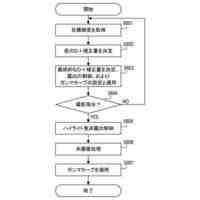
【課題】画角の設定等が容易なカメラユニットを提供する。
【解決手段】高解像度領域と低解像度領域を有する光学像を受光する光学系を有し、高解像度領域の垂直、水平画角をθv、θh、光軸の垂直、水平方向角度をφv、φh、移動体の長軸方向のドライバの視点とカメラユニットのオフセットをx、移動体の短軸方向の移動体の側面からのオフセットをy、地面高さ方向のオフセットをh、長軸方向における、ドライバの視点位置から後方の距離をd1、d2、距離d1、d2における地面上の所定の幅をw1,w2とするとき、Atan(h/(d1+x))-θv/2<φv<Atan(h/(d2+x))+θv/2、Φh_limit=max(Atan((w1-y)/(d1+x))-θh/2,Atan((w2-y)/(d2+x))-θh/2)、Φh_limit<φh<-Atan(y/(d1+x))+θh/2を満たすよう設置する。
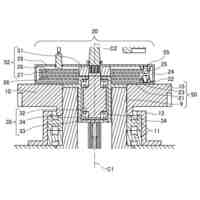
【選択図】図4
特許請求の範囲
【請求項1】
高解像度領域と低解像度領域を有する光学像を撮像手段の受光面に形成する光学系を有すると共に移動体の側方に設置されるカメラユニットを有し、
前記高解像度領域の垂直画角をθv、水平画角をθh、前記光学系の光軸の垂直方向角度をφv、水平方向角度をφh、前記移動体の長軸方向のドライバの視点と前記カメラユニットのオフセットをx、前記移動体の短軸方向の前記カメラユニットの前記移動体の側面からのオフセットをy、前記カメラユニットの地面からの高さ方向のオフセットをh、前記長軸方向における、前記ドライバの視点位置からの距離をd1、d2、前記距離d1、d2における地面上の所定の幅をw1,w2とするとき、
Atan(h/(d1+x))-θv/2<φv<Atan(h/(d2+x))+θv/2・・・(数2)
Φh_limit
=max(Atan((w1-y)/(d1+x))-θh/2,Atan((w2-y)/(d2+x))-θh/2)・・・(数3)
Φh_limit<φh<-Atan(y/(d1+x))+θh/2・・(数4)
を満たすように前記カメラユニットを設置することを特徴とする移動体。
続きを表示(約 1,500 文字)
【請求項2】
前記ドライバの視点の位置は、前記ドライバの着座位置での目の位置又は前記ドライバの座席面の中央位置であることを特徴とする請求項1に記載の移動体。
【請求項3】
前記高解像度領域と前記低解像度領域は低歪曲領域と高歪曲領域に夫々対応していることを特徴とする請求項1又は2に記載の移動体。
【請求項4】
前記光学系の焦点距離をf、半画角をθ、像面での像高をy、像高yと半画角θとの関係を表す射影特性をy(θ)とするとき、
前記低歪曲領域におけるy(θ)はf×θより大きく、前記高歪曲領域における前記射影特性とは異なることを特徴とする請求項3に記載の移動体。
【請求項5】
前記低歪曲領域は、中心射影方式(y=f×tanθ)又は等距離射影方式(y=f×θ)に近似した射影特性となるように構成されていることを特徴とする請求項4に記載の移動体。
【請求項6】
θmaxを前記光学系が有する最大の半画角とするとき、
1<f×sin(θmax)/y(θmax)≦1.9
を満足するように構成されていることを特徴とする請求項4又は5に記載の移動体。
【請求項7】
前記w1は1m,w2は4m、前記距離d1は4m、d2は20mであることを特徴とする請求項4に記載の移動体。
【請求項8】
更に、d3~d5を前記長軸方向についての前記ドライバの視点位置からの距離、w3~w5を前記距離d3~d5における地面上の所定の幅とするときに、
前記カメラユニットを
Atan(h/(d3+x))-θv/2>φv・・・・(数5)
-Atan(y/(d3+x))+θh/2>φh・・・・(数6)
Atan((w3-y)/(d3+x))-θh/2<φh・・・・(数7)
Atan((w4-y)/(d4+x))-θh/2<φh・・・・(数8)
Atan((w5-y)/(d5+x))-θh/2<φh・・・・(数9)
の条件を満たすように配置したことを特徴とする請求項1~7のいずれか1項に記載の移動体。
【請求項9】
更に、d3、d5を前記長軸方向についての、前記ドライバの視点位置からの距離、w5を前記距離d5における地面上の所定の幅とするときに、
前記カメラユニットを
Atan(h/(d3+x))-θv/2>φv・・・・(数5)
-Atan(y/(d3+x))+θh/2>φh・・・・(数6)
Atan((w5-y)/(d5+x))-θh/2<φh・・・・(数9)
の条件を満たすように配置したことを特徴とする請求項1~7のいずれか1項に記載の移動体。
【請求項10】
更に、d3~d5を前記長軸方向についての、前記ドライバの視点位置から後方の距離、w4、w5を夫々前記距離d4、d5における地面上の所定の幅とするときに、
前記カメラユニットを
Atan(h/(d3+x))-θv/2>φv・・・・(数5)
-Atan(y/(d3+x))+θh/2>φh・・・・(数6
Atan((w4-y)/(d4+x))-θh/2<φh・・・・(数8)
Atan((w5-y)/(d5+x))-θh/2<φh・・・・(数9)
の条件を満たすように配置したことを特徴とする請求項1~7のいずれか1項に記載の移動体。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、カメラユニットを有する移動体、画像処理方法、およびコンピュータプログラム等に関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
近年、車両に搭載されるルームミラー(後写鏡)を電子ルームミラーで置き換えるという要望がある。例えば特許文献1には、車両外の後方を撮像範囲とする撮像手段と車両内の表示手段で構成され、撮像手段で撮像した画像を車両内のディスプレイで表示することにより、ドライバが車両外の後方の様子を確認できる電子ルームミラーシステムが開示されている。
【0003】
他方、車両の後退時などに車両後方の死角をドライバが確認できるようにする後方確認システムがある。特許文献2には、車両後方を撮像するようにカメラを設置し、撮像画像を車室内に表示することにより、後退時などに車両後方の死角をドライバが確認できるようにするための後方確認システムが開示されている。
【先行技術文献】
【特許文献】
【0004】
特開2010-95202号公報
特開2004-345554号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
上述の電子ルームミラー用画像を撮像する撮像手段としてのカメラは、ドライバが後方の比較的遠方の様子をより精細に確認するため高解像度を有することが求められる。一方で、後方確認システム用カメラは、後退時などの衝突を回避するために、車両後方の死角や後側方を含んだより広い範囲での安全を確認するため、より広い範囲を撮像することが求められる。
【0006】
又、電子ルームミラーシステムと後方確認システムを車両に同時に搭載する場合、電子ルームミラーシステム用のカメラと、後方確認システム用のカメラを個別に搭載すると車載画像処理システムが複雑になってしまう。このような課題は、例えば、車両の周囲の状況を撮影するために複数のカメラを配置して自動運転などを行う自動運転システムにおいても同様に発生している。
【0007】
これに対して、例えば特殊な超広角レンズを用いたカメラを採用することによって、車両に設置するカメラの数を減らすことができる。しかし、超広角レンズなどを用いた場合には、広い画角は得られるものの周辺部の歪曲が大きく、高解像度で低歪曲の画像を電子サイドミラーなどに表示することが難しいという問題がある。
【0008】
従って本発明では、上記の課題を鑑みて、高解像度で低歪曲の画像を電子サイドミラーなどに表示できる移動体を提供することを1つの目的とする。
【課題を解決するための手段】
【0009】
上記目的を達成するために、移動体は、
高解像度領域と低解像度領域を有する光学像を撮像手段の受光面に形成する光学系を有すると共に移動体の側方に設置されるカメラユニットを有し、
前記高解像度領域の垂直画角をθv、水平画角をθh、前記光学系の光軸の垂直方向角度をφv、水平方向角度をφh、前記移動体の長軸方向のドライバの視点と前記カメラユニットのオフセットをx、前記移動体の短軸方向の前記カメラユニットの前記移動体の側面からのオフセットをy、前記カメラユニットの地面からの高さ方向のオフセットをh、前記長軸方向における、前記ドライバの視点位置からの距離をd1、d2、前記距離d1、d2における地面上の所定の幅をw1,w2とするとき、
Atan(h/(d1+x))-θv/2<φv<Atan(h/(d2+x))+θv/2・・・(数2)
Φh_limit
=max(Atan((w1-y)/(d1+x))-θh/2,Atan((w2-y)/(d2+x))-θh/2)・・・(数3)
Φh_limit<φh<-Atan(y/(d1+x))+θh/2・・(数4)
を満たすように前記カメラユニットを設置することを特徴とする。
【発明の効果】
【0010】
本発明によれば、高解像度で低歪曲の画像を電子サイドミラーなどに表示できる移動体を実現することができる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
キヤノン株式会社
成形体
10日前
キヤノン株式会社
撮像装置
18日前
キヤノン株式会社
記録装置
18日前
キヤノン株式会社
記録装置
6日前
キヤノン株式会社
撮像装置
10日前
キヤノン株式会社
撮像装置
10日前
キヤノン株式会社
定着装置
3日前
キヤノン株式会社
撮像装置
今日
キヤノン株式会社
測距装置
19日前
キヤノン株式会社
雲台装置
18日前
キヤノン株式会社
電子機器
25日前
キヤノン株式会社
制御装置
20日前
キヤノン株式会社
定着装置
10日前
キヤノン株式会社
記録装置
11日前
キヤノン株式会社
光学機器
25日前
キヤノン株式会社
定着装置
19日前
キヤノン株式会社
読取装置
10日前
キヤノン株式会社
カメラ装置
25日前
キヤノン株式会社
光走査装置
3日前
キヤノン株式会社
露光ヘッド
3日前
キヤノン株式会社
画像形成装置
18日前
キヤノン株式会社
定着用回転体
7日前
キヤノン株式会社
光電変換素子
18日前
キヤノン株式会社
情報処理装置
18日前
キヤノン株式会社
画像形成装置
13日前
キヤノン株式会社
画像形成装置
13日前
キヤノン株式会社
画像形成装置
6日前
キヤノン株式会社
画像形成装置
10日前
キヤノン株式会社
画像形成装置
20日前
キヤノン株式会社
画像形成装置
5日前
キヤノン株式会社
画像形成装置
5日前
キヤノン株式会社
画像形成装置
20日前
キヤノン株式会社
画像形成装置
20日前
キヤノン株式会社
画像形成装置
20日前
キヤノン株式会社
画像形成装置
20日前
キヤノン株式会社
画像形成装置
20日前
続きを見る
他の特許を見る






 特許ウォッチ
特許ウォッチ