TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024060163
公報種別
公開特許公報(A)
公開日
2024-05-02
出願番号
2022167330
出願日
2022-10-19
発明の名称
船舶推進システムおよび船舶
出願人
ヤマハ発動機株式会社
代理人
弁理士法人あい特許事務所
主分類
B63H
21/21 20060101AFI20240424BHJP(船舶またはその他の水上浮揚構造物;関連艤装品)
要約
【課題】横移動のためのキャリブレーションを容易にできる船舶推進システムを提供する。
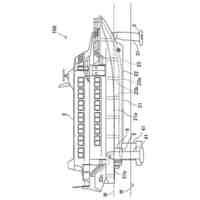
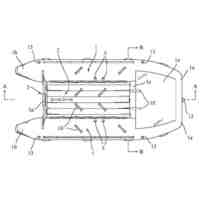
【解決手段】船舶推進システム100は、2つの推進機OM,EM、ジョイスティックユニット18およびメインコントローラ101を含む。2つの推進機の配置は、船体の中心線に関して非対称である。メインコントローラは、ジョイスティックユニットが発生する右横移動指令/左横移動指令に応じて、2つの推進機の一方に後進推進力を発生させ、それらの他方に前進推進力を発生させる右横移動制御/左横移動制御を実行する。メインコントローラは、右横移動制御/左横移動制御における前進推進力と後進推進力との比を表す右横移動スラスト比/左横移動スラスト比を記憶するメモリ101Mを有する。メインコントローラは、キャリブレーションモードにおいて、右横移動スラスト比および左横移動スラスト比の一方が設定されると、その逆数をその他方の初期値として設定する。
【選択図】図7
特許請求の範囲
【請求項1】
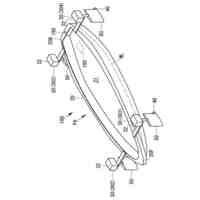
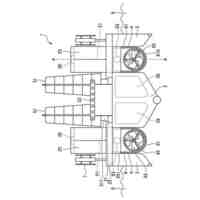
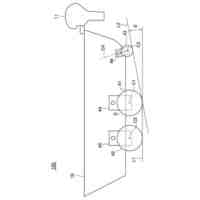
船体に取り付けられる第1推進機と、
前記船体の前後方向に沿う中心線に関して前記第1推進機と非対称な位置で前記船体に取り付けられる第2推進機と、
前記船体を右方向および左方向のうちの一方に横移動させる第1横移動指令、および前記船体を右方向および左方向のうちの他方に横移動させる第2横移動指令を発生する横移動指令発生器と、
前記第1横移動指令に応じて、前記第1推進機および前記第2推進機の一方に後進推進力を発生させ、かつ前記第1推進機および前記第2推進機の他方に前進推進力を発生させる第1横移動制御を実行し、前記第2横移動指令に応じて前記第1推進機および前記第2推進機の一方に前進推進力を発生させ、かつ前記第1推進機および前記第2推進機の他方に後進推進力を発生させる第2横移動制御を実行するコントローラと、を含み、
前記コントローラは、前記第1横移動制御における前進推進力と後進推進力との比を表す第1横移動スラスト比と、前記第2横移動制御における前進推進力と後進推進力との比を表す第2横移動スラスト比とを記憶するメモリを有し、前記メモリに記憶されている第1横移動スラスト比に従って前記第1横移動制御における前進推進力および後進推進力を設定し、前記メモリに記憶されている第2横移動スラスト比に従って前記第2横移動制御における前進推進力および後進推進力を設定し、
前記コントローラは、前記第1横移動スラスト比および前記第2横移動スラスト比を設定するキャリブレーションモードにおいて、前記第1横移動スラスト比および前記第2横移動スラスト比の一方が設定されると、その逆数を前記第1横移動スラスト比および前記第2横移動スラスト比の他方の初期値として設定する、船舶推進システム。
続きを表示(約 870 文字)
【請求項2】
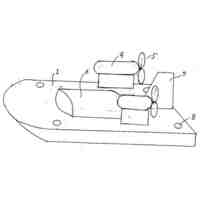
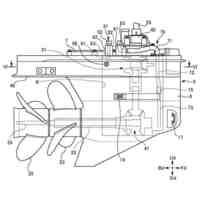
前記第1推進機がエンジン推進機であり、前記第2推進機が電動推進機である、請求項1に記載の船舶推進システム。
【請求項3】
前記第1推進機が前記中心線上に配置され、前記第2推進機が前記中心線からずれて配置される、請求項1に記載の船舶推進システム。
【請求項4】
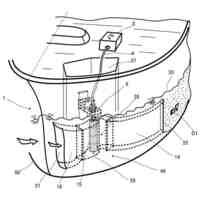
前記第1推進機および前記第2推進機が前記船体の船尾に取り付けられる、請求項3に記載の船舶推進システム。
【請求項5】
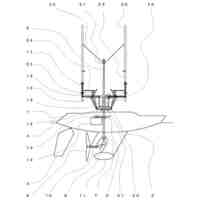
前記第1推進機は、前記船体のキールよりも下方にプロペラ回転軸線が配置され、
前記第2推進機は、前記船体のキールよりも上方にプロペラ回転軸線が配置される、請求項1に記載の船舶推進システム。
【請求項6】
船体に取り付けられる第1推進機と、
前記船体の前後方向に沿う中心線に関して前記第1推進機と非対称な位置で前記船体に取り付けられる第2推進機と、
前記船体を右方向および左方向のうちの一方に横移動させる第1横移動指令、および前記船体を右方向および左方向のうちの他方に横移動させる第2横移動指令を発生する横移動指令発生器と、
前記第1横移動指令に応じて、前記第1推進機および前記第2推進機の一方に後進推進力を発生させ、かつ前記第1推進機および前記第2推進機の他方に前進推進力を発生させる第1横移動制御を実行し、前記第2横移動指令に応じて前記第1推進機および前記第2推進機の一方に前進推進力を発生させ、かつ前記第1推進機および前記第2推進機の他方に後進推進力を発生させる第2横移動制御を実行するコントローラと、を含み、
前記第1横移動制御における前記前進推進力および前記後進推進力の大小関係と、前記第2横移動制御における前記前進推進力および前記後進推進力の大小関係とが反転する、船舶推進システム。
【請求項7】
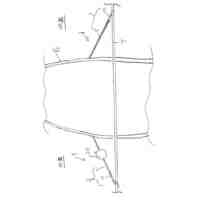
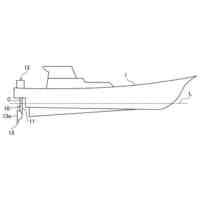
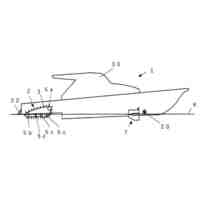
船体と、
前記船体に装備される、請求項1~6のいずれか一項に記載の船舶推進システムと、を含む、船舶。
発明の詳細な説明
【技術分野】
【0001】
この発明は、船舶推進システムおよびそれを備える船舶に関する。
続きを表示(約 2,500 文字)
【背景技術】
【0002】
特許文献1は、左舷および右舷の前後進プロペラと、それらをそれぞれ駆動する2つのエンジンと、左舷および右舷の前後進プロペラの後方にそれぞれ配置された2つの舵と、船頭に配置されるサイドスラスタとを備えた船舶を開示している。特許文献1は、さらに、ジョイスティックレバーの操作に応じて前後進プロペラおよびサイドスラスタから推力を発生させて、船舶を移動および回頭させることが開示されている。そして、横移動についての校正、斜め移動についての校正、および回頭についての校正に言及されており、とくに回頭についての校正について詳しく説明されている。
【先行技術文献】
【特許文献】
【0003】
特開2017-178290号公報(段落0027、0028)
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1には、横移動についての校正に関しては、詳しい記述はない。
【0005】
船舶の旋回中心は、船体の構造、様々な艤装機器の配置、積載物等に依存するので、個々の船舶で位置が異なっている。また、同じ仕様の推進機であっても、同じ推進力指令に対して出力される推進力にはばらつきがあり、さらには船体に実際に作用する推進力が同じとも限らない。そのため、とりわけ、船体を横移動、すなわち、回頭することなく左右に平行移動させる船体挙動を実現するためには、個々の船舶において、事前にキャリブレーション(校正)を実行する必要がある。横移動は、2機以上の推進機が船体に備えられる場合に可能である。具体的には、2機の推進機が発生する推進力の合力ベクトルが、旋回中心を通って左右方向に延びる作用線上で作用することにより、横移動が達成される。旋回中心の位置は未知であるので、船体が実際に横移動するようにジョイスティック等の操作子を操作し、そのときの推進機の制御状態(運転状態)をメモリに記憶させることにより、キャリブレーションが達成される。右方向の横移動と左方向の横移動とでは、条件が異なるので、基本的には、横移動のキャリブレーションは、右方向および左方向に関してそれぞれ行う必要がある。
【0006】
この発明の一実施形態は、横移動のためのキャリブレーションを容易にすることができる船舶推進システムおよび船舶を提供する。
【0007】
また、この発明の一実施形態は、横移動の際に良好な船体挙動を得ることができる船舶推進システムおよび船舶を提供する。
【課題を解決するための手段】
【0008】
この発明の一実施形態は、船体に取り付けられる第1推進機と、前記船体の前後方向に沿う中心線に関して前記第1推進機と非対称な位置で前記船体に取り付けられる第2推進機と、前記船体を右方向および左方向のうちの一方に横移動させる第1横移動指令、および前記船体を右方向および左方向のうちの他方に横移動させる第2横移動指令を発生する横移動指令発生器と、コントローラとを含む、船舶推進システムを提供する。前記コントローラは、前記第1横移動指令に応じて、前記第1推進機および前記第2推進機の一方に後進推進力を発生させ、かつ前記第1推進機および前記第2推進機の他方に前進推進力を発生させる第1横移動制御を実行し、前記第2横移動指令に応じて前記第1推進機および前記第2推進機の一方に前進推進力を発生させ、かつ前記第1推進機および前記第2推進機の他方に後進推進力を発生させる第2横移動制御を実行する。前記コントローラは、前記第1横移動制御における前進推進力と後進推進力との比を表す第1横移動スラスト比と、前記第2横移動制御における前進推進力と後進推進力との比を表す第2横移動スラスト比とを記憶するメモリを有し、前記メモリに記憶されている第1横移動スラスト比に従って前記第1横移動制御における前進推進力および後進推進力を設定し、前記メモリに記憶されている第2横移動スラスト比に従って前記第2横移動制御における前進推進力および後進推進力を設定する。前記コントローラは、前記第1横移動スラスト比および前記第2横移動スラスト比を設定するキャリブレーションモードにおいて、前記第1横移動スラスト比および前記第2横移動スラスト比の一方が設定されると、その逆数を前記第1横移動スラスト比および前記第2横移動スラスト比の他方の初期値として設定する。
【0009】
この構成によれば、キャリブレーションモードにおいて、一方向への横移動のための横移動スラスト比が設定されると、他方への横移動のための横移動スラスト比の初期値が適切に設定される。それにより、他方への横移動のためのキャリブレーションが容易になる。したがって、横移動のためのキャリブレーションが容易になる。
【0010】
第1推進機および第2推進機は、船体の中心線に関して非対称な配置で船体に取り付けられる。そのため、たとえば、第1推進機が発生する推進力が船体に有効に作用する割合と、第2推進機が発生する推進力が船体に有効に作用する割合とは、必ずしも等しくなく、とりわけ各推進機が発生する水流と船体との相互作用に依存する。具体的には、横移動に際して、第1推進機および第2推進機の一方の水流が船体へと向かうとき、その水流と船体との相互作用の大小によって、船体に有効に働く推進力が影響を受ける。この影響は、左右一方への横移動とその他方への横移動とでは、船体の中心線に対して、非対称に現れる。そこで、この実施形態では、キャリブレーションモードにおいて、第1横移動スラスト比および第2横移動スラスト比の一方が設定されると、その逆数を第1横移動スラスト比および第2横移動スラスト比の他方の初期値として設定する。それにより、第1推進機および第2推進機の非対称配置を考慮した適切な初期値を設定できるので、その後のキャリブレーションが容易になる。
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPatで参照する
関連特許
ヤマハ発動機株式会社
鞍乗型車両
3日前
ヤマハ発動機株式会社
情報処理方法および装置、船舶、プログラム
5日前
ヤマハ発動機株式会社
リーン車両
2日前
個人
浮遊人工島
9か月前
個人
水難救命スーツ
4か月前
個人
船舶用プロペラ
3か月前
個人
水素製造船
8か月前
個人
係留装置 調理器具
9か月前
個人
風力自在航行システム
11か月前
個人
太陽光発電装置
11か月前
個人
流体抵抗低減省エネ船
2か月前
公立大学法人大阪
船舶
12か月前
個人
簡易型ライフジャケット
4か月前
個人
浮体式洋上風力発電方式
5か月前
個人
海流発電用三胴船
6か月前
株式会社未来予測研究所
滑空船
12か月前
個人
船舶推進装置
4か月前
川崎重工業株式会社
水中翼船
9か月前
個人
魚雷防御装置及び魚雷防御方法
11か月前
個人
水難救助信号発信機
12か月前
石田造船株式会社
三胴型旅客船
8か月前
個人
船舶の制動装置
8か月前
株式会社ユニオンジャパン
ボート
9か月前
株式会社アビヨン・プロ
救命胴衣
9か月前
個人
船舶
11か月前
ヤマハ発動機株式会社
船舶
5か月前
個人
浮体式足場のブイ組立体
4か月前
横堀カーショップ合同会社
開閉装置
10か月前
トヨタ自動車株式会社
ガンネル治具
10日前
個人
海洋「いかだ」上の風力発電システム
2か月前
ヤマハ発動機株式会社
救難艇
4か月前
スズキ株式会社
船外機
11か月前
スズキ株式会社
船外機
11か月前
個人
キャタピラ推進式高速船
1か月前
スズキ株式会社
船外機
11か月前
BOYLE株式会社
ポッド型推進装置
10か月前
続きを見る
他の特許を見る










 特許ウォッチ
特許ウォッチ