TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024057952
公報種別
公開特許公報(A)
公開日
2024-04-25
出願番号
2022164964
出願日
2022-10-13
発明の名称
運搬装置
出願人
株式会社リコー
代理人
弁理士法人酒井国際特許事務所
主分類
B66F
9/24 20060101AFI20240418BHJP(巻上装置;揚重装置;牽引装置)
要約
【課題】台車等の運搬対象物の回収に適切なAGVのフォーク幅で回収動作できる運搬装置を提供する。
【解決手段】本発明は、運搬装置であって、台車の台車幅を算出する台車幅算出部と、前記台車の車輪の端部間の車輪端部間距離を算出する車輪端部間距離算出部と、前記台車幅と前記車輪端部間距離に基づいて、前記運搬装置のフォーク幅を算出するフォーク幅算出部と、算出した前記フォーク幅に基づいて前記運搬装置のフォークの幅を変更するフォーク幅制御部と、を有する。
【選択図】図1
特許請求の範囲
【請求項1】
運搬装置であって、
台車の台車幅を算出する台車幅算出部と、
前記台車の車輪の端部間の車輪端部間距離を算出する車輪端部間距離算出部と、
前記台車幅と前記車輪端部間距離に基づいて、前記運搬装置のフォーク幅を算出するフォーク幅算出部と、
算出した前記フォーク幅に基づいて前記運搬装置のフォークの幅を変更するフォーク幅制御部と、
を有する運搬装置。
続きを表示(約 680 文字)
【請求項2】
前記運搬装置から前記台車のかご部までの第一の距離データを取得する第一のセンサを有し、
前記台車幅算出部は、前記第一のセンサで得られた前記第一の距離データに基づいて前記台車の台車幅を算出する、請求項1に記載の運搬装置。
【請求項3】
前記運搬装置から前記台車の車輪部までの第二の距離データを取得する第二のセンサを有し、
前記車輪端部間距離算出部は、前記第二のセンサで得られた前記第二の距離データに基づいて前記車輪端部間距離を算出する、請求項2に記載の運搬装置。
【請求項4】
前記フォーク幅算出部は、前記第一のセンサを用いた前記台車幅の算出と、前記第二のセンサを用いた前記車輪端部間距離の算出を、前記台車の種類に応じて切り替える、請求項3に記載の運搬装置。
【請求項5】
前記フォーク幅算出部は、前記車輪端部間距離が前記台車幅よりも大きい場合、前記フォーク幅を前記車輪端部間距離に設定する、請求項1から4のいずれか一に記載の運搬装置。
【請求項6】
前記フォーク幅算出部は、前記車輪端部間距離が前記台車幅よりも小さい場合、前記フォーク幅を前記台車幅に設定する、請求項1から4のいずれか一に記載の運搬装置。
【請求項7】
前記フォーク幅算出部は、前記第一のセンサを用いた前記台車幅の算出、および前記第二のセンサを用いた前記車輪端部間距離の算出のどちらも算出できない場合に、前記フォーク幅を算出せず異常を報知する、請求項3または4に記載の運搬装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、運搬装置に関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
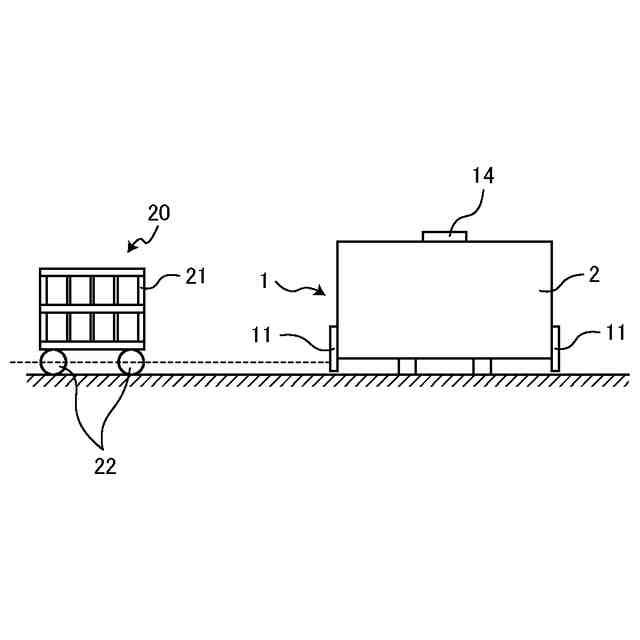
工場または物流倉庫等では、パレットまたは台車等を使用して物を搬送することが一般的である。また、工場または物流倉庫等内では、様々な形態の台車等が混在している事例が多くあり、かご台車または6輪台車等が存在する。これらの複数の形状の台車とパレットの両方を搬送できるリフタータイプのAGV(Automatic Guided Vehicle)等の運搬装置が開発されている。
【0003】
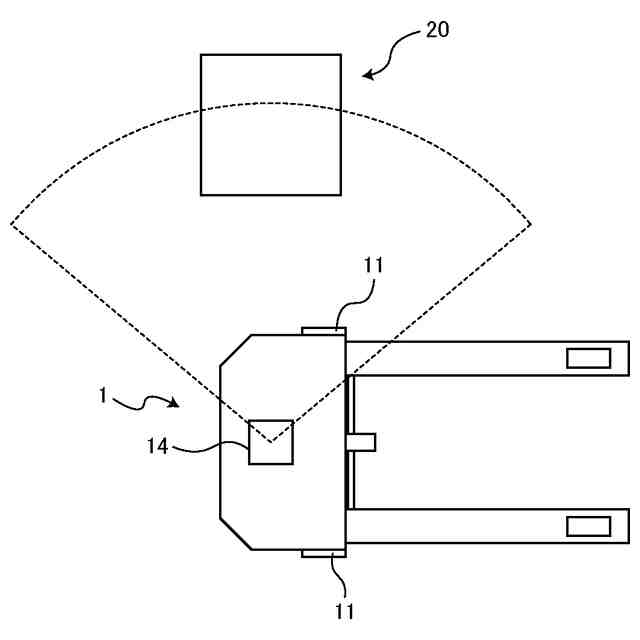
AGV等によるパレットまたは台車等の運搬対象物の回収動作において、AGVは、運搬対象物の付近までは上位システム等からの指示を受けて走行を行う。そして、実際に台車またはパレットが置かれている位置または角度に合わせてのアプローチ動作においては、AGVが、運搬対象物の検出を行い、その位置を微調整している。台車等の運搬対象物の検出においては、測距センサ(LRF(Laser Range Finder)等)を用いて、台車のフレームまたは台車等に装着された識別板を検出し、台車の位置、角度、幅を求めることが行われている。
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、背の低い台車、識別板を装着できない台車等の場合には、台車を検出することができない。また、台車の車輪が、かご部からはみ出しているような場合、台車の回収時にAGVのフォーク部が台車の車輪に接触し、台車を押し出してしまう等、適切なフォーク幅で台車の回収動作を行うことができない。
【0005】
本発明は、台車等の運搬対象物の回収に適切なAGVのフォーク幅で回収動作できる運搬装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
上述した課題を解決し、目的を達成するために、本発明は、運搬装置であって、台車の台車幅を算出する台車幅算出部と、前記台車の車輪の端部間の車輪端部間距離を算出する車輪端部間距離算出部と、前記台車幅と前記車輪端部間距離に基づいて、前記運搬装置のフォーク幅を算出するフォーク幅算出部と、算出した前記フォーク幅に基づいて前記運搬装置のフォークの幅を変更するフォーク幅制御部と、を有する。
【発明の効果】
【0007】
本発明によれば、台車等の運搬対象物の回収に適切なAGVのフォーク幅で回収動作できる、という効果を奏する。
【図面の簡単な説明】
【0008】
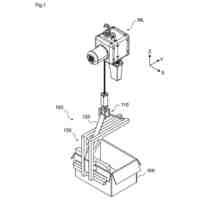
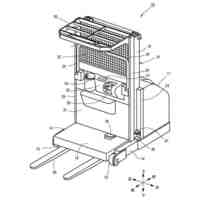
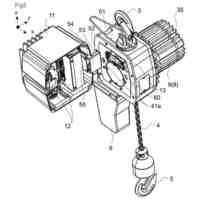
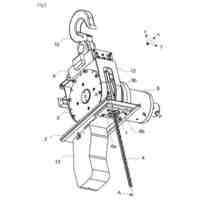
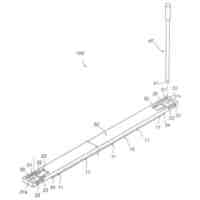
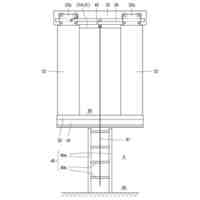
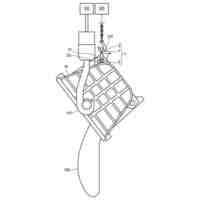
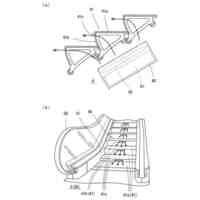
図1は、本実施の形態にかかる運搬装置の一例の斜視図である。
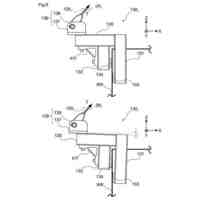
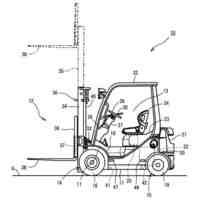
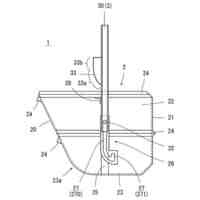
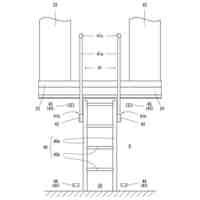
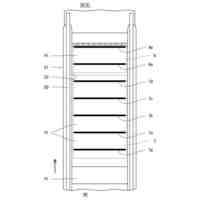
図2は、本実施の形態にかかる運搬装置の一例の側面図である。
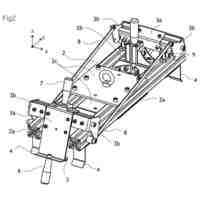
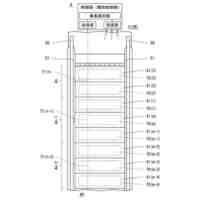
図3は、本実施の形態にかかる運搬装置の一例の上面図である。
図4は、本実施の形態にかかる運搬装置の一例の正面図である。
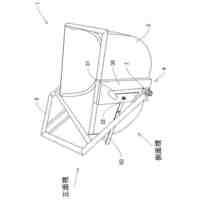
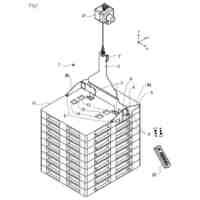
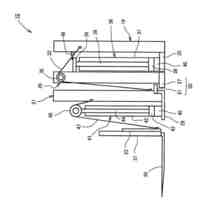
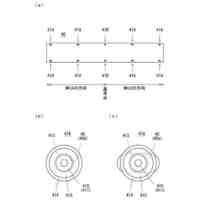
図5は、本実施の形態にかかる運搬装置の運搬対象物の一例であるかご台車の斜視図である。
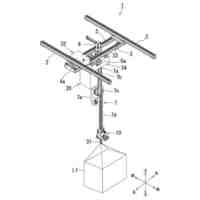
図6は、本実施の形態にかかる運搬装置の上面測距センサを用いたかご台車の検出範囲の一例の鳥瞰図である。
図7は、本実施の形態にかかる運搬装置の上面測距センサを用いたかご台車の検出範囲の一例を説明するための図である。
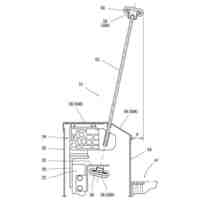
図8は、本実施の形態にかかる運搬装置の側面測距センサを用いたかご台車の検出範囲の一例の鳥瞰図である。
図9は、本実施の形態にかかる運搬装置の側面測距センサを用いたかご台車の検出範囲の一例を説明するための図である。
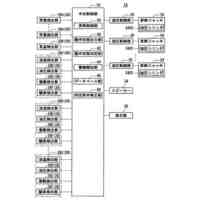
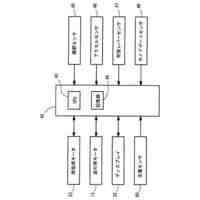
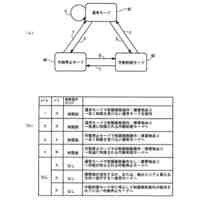
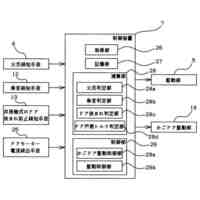
図10-1は、本実施の形態にかかる運搬装置の機能構成の一例を示す図である。
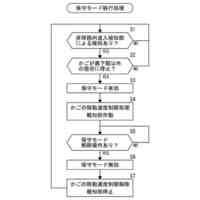
図10-2は、本実施の形態にかかる運搬装置によるかご台車の回収動作の流れの一例を示すフローチャートである。
【発明を実施するための形態】
【0009】
以下に添付図面を参照して、運搬装置の実施の形態を詳細に説明する。
【0010】
まず、図1~4を用いて、本実施の形態にかかる運搬装置の構成の一例について説明する。図1は、本実施の形態にかかる運搬装置の一例の斜視図である。図2は、本実施の形態にかかる運搬装置の一例の側面図である。図3は、本実施の形態にかかる運搬装置の一例の上面図である。図4は、本実施の形態にかかる運搬装置の一例の正面図である。なお、後述する前後方向とは、図2の左右方向を指し、左方向を前方、右方向を後方とする。後述する上下方向とは、図2の上下方向を指すものとする。後述する左右方向とは、図3の上下方向を指し、図3の上方向を右方向、図3の下方向を左方向とする。また、他の図面において前後方向、上下方向、および左右方向を説明する際は、図2または図3に対応した方向を指すものとする。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
高低間移動補助装置
8か月前
ユニパルス株式会社
吊具
2か月前
ユニパルス株式会社
吊具
2か月前
ユニパルス株式会社
吊具装置
9か月前
個人
吊りバケット装置
5か月前
ユニパルス株式会社
吊具装置
9か月前
株式会社フジタ
昇降装置
7か月前
株式会社豊田自動織機
産業車両
5か月前
株式会社豊田自動織機
荷役車両
24日前
株式会社豊田自動織機
荷役車両
10日前
株式会社豊田自動織機
荷役車両
5か月前
株式会社豊田自動織機
荷役車両
5か月前
株式会社豊田自動織機
荷役車両
1か月前
株式会社豊田自動織機
産業車両
8か月前
ユニパルス株式会社
物品昇降装置
7か月前
株式会社アイセイ
搬送装置
6か月前
ユニパルス株式会社
荷役助力装置
5日前
有限会社矢島製作所
ローダ
9か月前
株式会社ノセ技研
バケット
5か月前
株式会社北川鉄工所
吊荷制御方法
1か月前
ユニパルス株式会社
荷役助力装置
7か月前
ダイコー興産株式会社
引掛具
9か月前
フジテック株式会社
エレベータ
2か月前
株式会社豊田自動織機
フォークリフト
6か月前
フジテック株式会社
エレベータ
3か月前
フジテック株式会社
エレベータ
8か月前
大同特殊鋼株式会社
治具
1か月前
フジテック株式会社
エレベータ
3か月前
フジテック株式会社
乗客コンベア
8か月前
フジテック株式会社
乗客コンベア
10か月前
フジテック株式会社
乗客コンベア
10か月前
フジテック株式会社
乗客搬送装置
2か月前
フジテック株式会社
乗客コンベア
8か月前
フジテック株式会社
乗客コンベア
7か月前
フジテック株式会社
乗客コンベア
8か月前
フジテック株式会社
乗客コンベア
9か月前
続きを見る
他の特許を見る








 特許ウォッチ
特許ウォッチ