TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024054508
公報種別
公開特許公報(A)
公開日
2024-04-17
出願番号
2022160760
出願日
2022-10-05
発明の名称
車両位置推定装置
出願人
三菱電機株式会社
代理人
弁理士法人ぱるも特許事務所
主分類
G01C
21/28 20060101AFI20240410BHJP(測定;試験)
要約
【課題】車両がレーン変更をおこなう場合においても、車両の位置推定精度が劣化することを抑制し現在位置を正確に推定する必要がある。
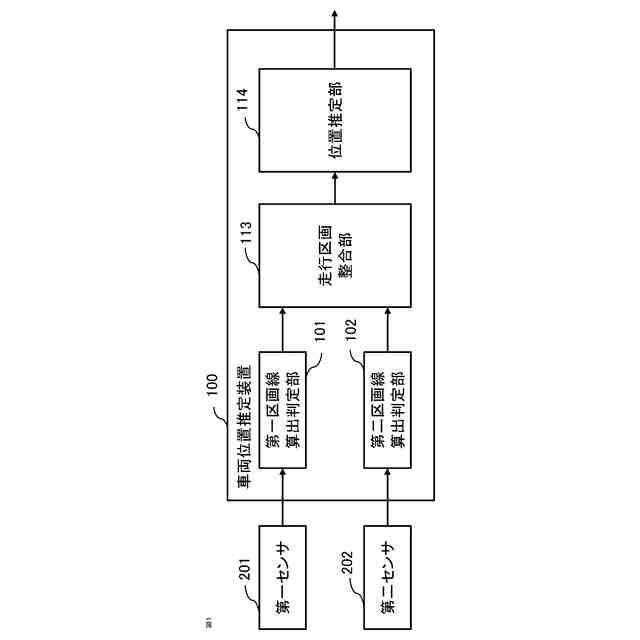
【解決手段】車両と区画線の間の第一の距離を算出し車両による区画線の横断の有無を判定する第一区画線算出判定部、車両と区画線の間の第二の距離を算出し車両による区画線の横断の有無を判定する第二区画線算出判定部、第一区画線算出判定部によって判定された区画線の横断の有無と、第二区画線算出判定部によって判定された区画線の横断の有無と、に基づいて第一の距離または第二の距離の少なくとも一方を整合させる走行区画整合部、および、走行区画整合部によって整合された第一の距離または第二の距離に基づいて車両の位置を推定する位置推定部、を備えた車両位置推定装置。
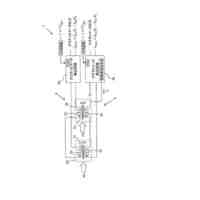
【選択図】図1
特許請求の範囲
【請求項1】
路面の区画線の位置を検出して車両と前記区画線の間の第一の距離を算出し、前記第一の距離に基づいて前記車両による前記区画線の横断の有無を判定する第一区画線算出判定部、
路面の前記区画線の位置を検出して前記車両と前記区画線の間の第二の距離を算出し、前記第二の距離に基づいて前記車両による前記区画線の横断の有無を判定する第二区画線算出判定部、
前記第一区画線算出判定部によって判定された前記車両による前記区画線の横断の有無と、前記第二区画線算出判定部によって判定された前記車両による前記区画線の横断の有無と、に基づいて前記第一の距離または前記第二の距離の少なくとも一方を整合させる走行区画整合部、および、
前記走行区画整合部によって整合された前記第一の距離または前記第二の距離に基づいて前記車両の位置を推定する位置推定部、を備えた車両位置推定装置。
続きを表示(約 2,000 文字)
【請求項2】
前記第一区画線算出判定部は、第一センサからの信号に基づいて前記区画線の位置を検出し、
前記第二区画線算出判定部は、第二センサからの信号に基づいて前記区画線の位置を検出する、請求項1に記載の車両位置推定装置。
【請求項3】
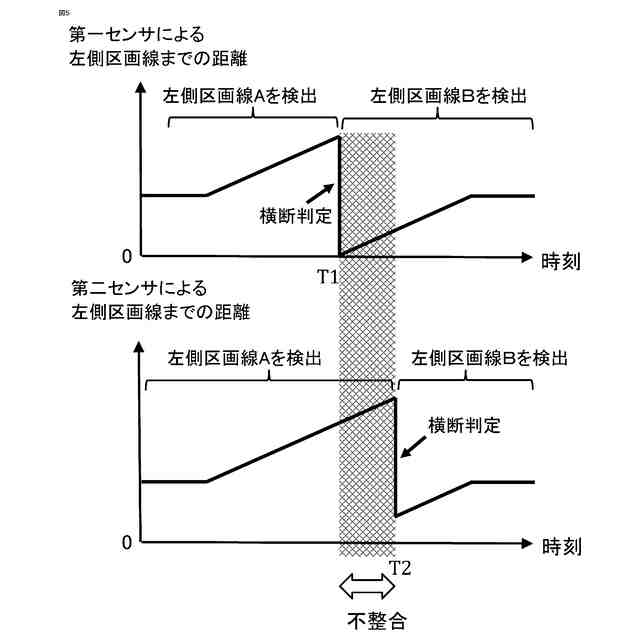
前記第一区画線算出判定部は、前記第一の距離が予め定められた横断判定時間内に予め定められた横断判定距離よりも大きく変化した場合、または前記区画線の位置の左右が切り替わった場合に、前記車両が前記区画線を横断した、と判定し、
前記第二区画線算出判定部は、前記第二の距離が前記横断判定時間内に前記横断判定距離よりも大きく変化した場合、または前記区画線の位置の左右が切り替わった場合に、前記車両が前記区画線を横断した、と判定する、請求項1に記載の車両位置推定装置。
【請求項4】
前記走行区画整合部は、前記第一区画線算出判定部と前記第二区画線算出判定部のうちのいずれかが前記車両が前記区画線を横断したと判定した場合に、前記第一の距離または前記第二の距離の少なくとも一方の整合を開始する請求項1に記載の車両位置推定装置。
【請求項5】
前記走行区画整合部は、距離の整合を開始した後予め定められた整合継続時間が経過した後に距離の整合を終了する請求項4に記載の車両位置推定装置。
【請求項6】
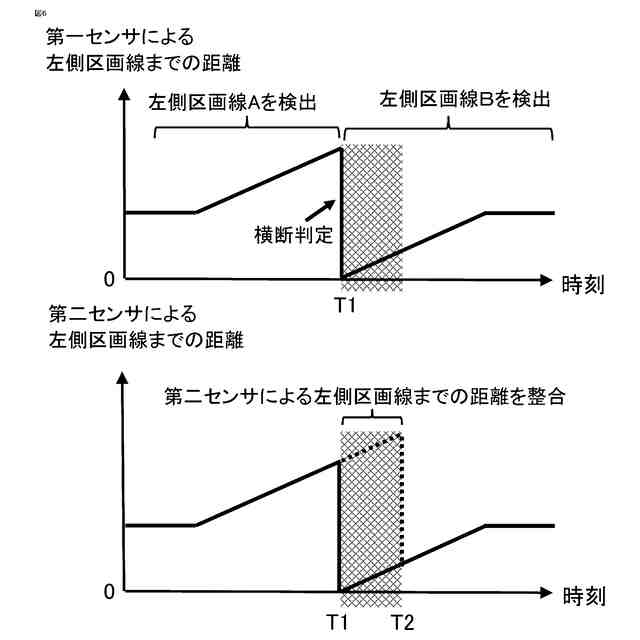
前記走行区画整合部は、前記第一区画線算出判定部と前記第二区画線算出判定部のうち一方が他方よりも早く前記車両が前記区画線を横断したと判定した場合、前記一方の区画線算出判定部の算出した距離に他方の区画線算出判定部の算出した距離を一致させる距離の整合を開始する請求項1に記載の車両位置推定装置。
【請求項7】
前記走行区画整合部は、前記他方の区画線算出判定部によって前記車両が前記区画線を横断したと判定された場合に、前記他方の区画線算出判定部の算出した距離の整合を終了する請求項6に記載の車両位置推定装置。
【請求項8】
前記走行区画整合部は、前記第一区画線算出判定部と前記第二区画線算出判定部のうちのいずれかが前記車両が前記区画線を横断したと判定した場合に、前記区画線とは別の区画線との距離によって前記第一の距離および前記第二の距離の整合を開始する請求項1に記載の車両位置推定装置。
【請求項9】
前記第一区画線算出判定部は、前記車両と前記車両の右側の区画線の間の第一の右側距離の算出および前記第一の右側距離に基づく前記車両による前記右側の区画線の横断の有無の判定、または、前記車両と前記車両の左側の区画線の間の第一の左側距離の算出および前記第一の左側距離に基づく前記車両による前記左側の区画線の横断の有無の判定、の少なくとも一方を実行し、
前記第二区画線算出判定部は、前記車両と前記車両の右側の区画線の間の第二の右側距離の算出および前記第二の右側距離に基づく前記車両による前記右側の区画線の横断の有無の判定、または、前記車両と前記車両の左側の区画線の間の第二の左側距離の算出と、前記第二の左側距離に基づく前記車両による前記左側の区画線の横断の有無の判定、の少なくとも一方を実行し、
前記走行区画整合部は、
前記第一区画線算出判定部と前記第二区画線算出判定部のうちのいずれかが前記車両が前記区画線を左から右へ横断したと判定した場合に、前記第一の右側距離および前記第二の右側距離の前記車両と前記車両が横断した前記区画線の右隣の区画線との距離による整合、または前記第一の左側距離および前記第二の左側距離の前記車両と前記車両が横断した前記区画線との距離による整合の少なくとも一方の整合を開始し、
前記第一区画線算出判定部と前記第二区画線算出判定部のうちのいずれかが前記車両が前記区画線を右から左へ横断したと判定した場合に、前記第一の右側距離および前記第二の右側距離の前記車両と前記車両が横断した前記区画線との距離による整合、または前記第一の左側距離および前記第二の左側距離の前記車両と前記車両が横断した前記区画線の左隣の区画線との距離による整合の少なくとも一方の整合を開始する、請求項8に記載の車両位置推定装置。
【請求項10】
前記車両の走行レーンが変更操作される場合に走行区画変更操作情報を取得する走行区画変更操作情報取得部を備え、
前記第一区画線算出判定部は、前記走行区画変更操作情報と前記第一の距離とに基づいて前記車両による前記区画線の横断の有無を判定し、
前記第二区画線算出判定部は、前記走行区画変更操作情報と前記第二の距離とに基づいて前記車両による前記区画線の横断の有無を判定する、請求項1に記載の車両位置推定装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本願は、車両位置推定装置に関するものである。
続きを表示(約 2,300 文字)
【背景技術】
【0002】
車両が路面を走行中に、車両の正確な位置を推定することが重要である。従来から、複数の検出手段の観測データを基に車両の位置を推定する技術が知られている。ここで検出手段は、車両に搭載され外部環境を検出するセンサであってもよいが、車両の外部に設けられ車両の位置、速度等の運動諸元を検出するセンサであってもよい。
【0003】
地球航法衛星システム(GNSS:Global Navigation Satellite System)によって車両の位置を算出する。そして、車両の位置を地図上で特定し、車両周辺の物体との距離を算出する。さらに車載センサによって周辺物体と車両との距離を検出する。これら二通りの手段によって算出した距離の偏差を最小化することで、車両の位置を正確に推定する技術が開示されている。(例えば特許文献1)
【先行技術文献】
【特許文献】
【0004】
特許第6203982号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
特許文献1に開示されている技術は、各検出手段で観測された周辺物体が同一の物体であることを前提としている。車両の周辺に類似する形状および色彩を有する物体が複数存在する場合には、各手段がそれぞれ異なる物体について車両までの距離を検出する場合が考えられる。このような場合に、二種類の算出された距離の偏差が最小となるように車両位置を修正した場合に車両の位置推定精度が劣化する場合がある。
【0006】
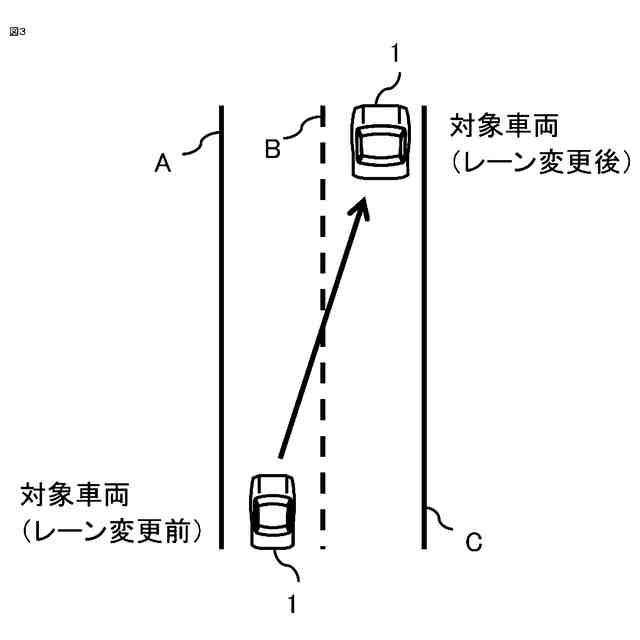
特にこの問題は、車両位置の推定に走行中の道路の区画線までの距離を用いた場合に発生する。この問題は、車両がレーン(走行車線)変更のために区画線を横断する運動をおこなった場合に顕著に現れる。なぜならば、各々の区画線の形状及び色は類似しているからである。車両のレーン変更の際には、各検出手段が求めた「車両からみて右側及び左側の区画線」について齟齬が発生する頻度が高いためである。
【0007】
本願は上記のような問題点を解決するためになされたものである。車両と区画線までの距離を用いて車両の位置を推定する際に、車両がレーン変更をおこなう場合においても、車両の位置推定精度が劣化することを抑制し現在位置を正確に推定することのできる車両位置推定装置を得ることを目的としている。
【課題を解決するための手段】
【0008】
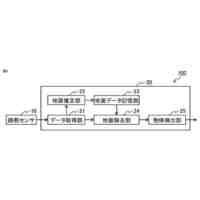
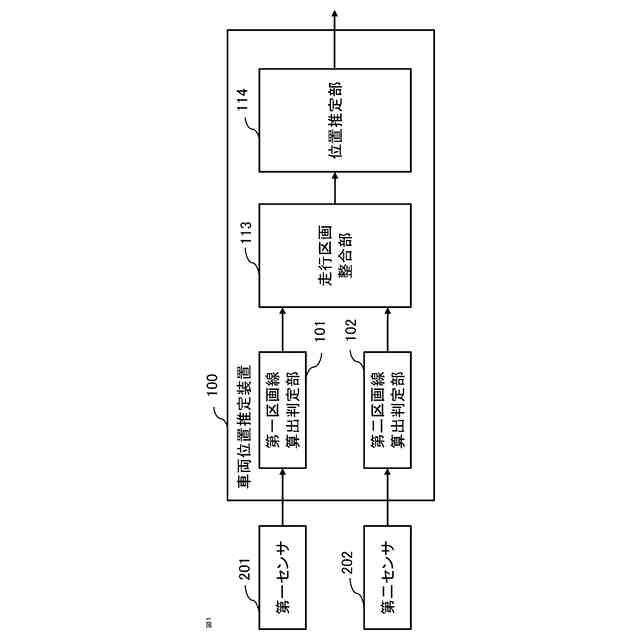
本願に係る車両位置推定装置は、
路面の区画線の位置を検出して車両と区画線の間の第一の距離を算出し、第一の距離に基づいて車両による区画線の横断の有無を判定する第一区画線算出判定部、
路面の区画線の位置を検出して車両と区画線の間の第二の距離を算出し、第二の距離に基づいて車両による区画線の横断の有無を判定する第二区画線算出判定部、
第一区画線算出判定部によって判定された車両による区画線の横断の有無と、第二区画線算出判定部によって判定された車両による区画線の横断の有無と、に基づいて第一の距離または第二の距離の少なくとも一方を整合させる走行区画整合部、および、
走行区画整合部によって整合された第一の距離または第二の距離に基づいて車両の位置を推定する位置推定部、を備えたものである。
【発明の効果】
【0009】
本願に係る車両位置推定装置によれば、車両と区画線までの距離を用いて車両の位置を推定する際に、車両がレーン変更をおこなう場合においても、車両の位置推定精度が劣化することを抑制し現在位置を正確に推定することができる。
【図面の簡単な説明】
【0010】
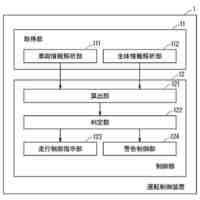
実施の形態1に係る車両位置推定装置の構成図である。
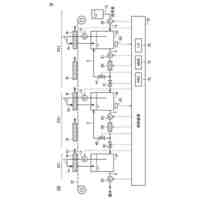
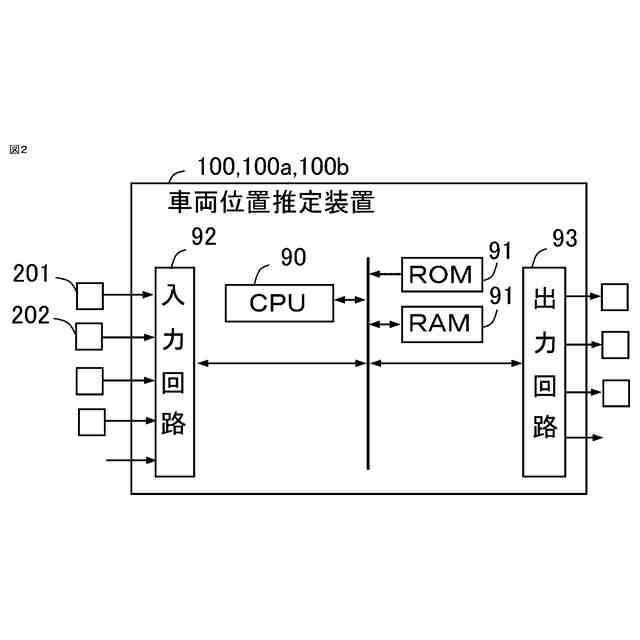
実施の形態1に係る車両位置推定装置のハードウェア構成図である。
実施の形態1に係る車両のレーン変更について示す図である。
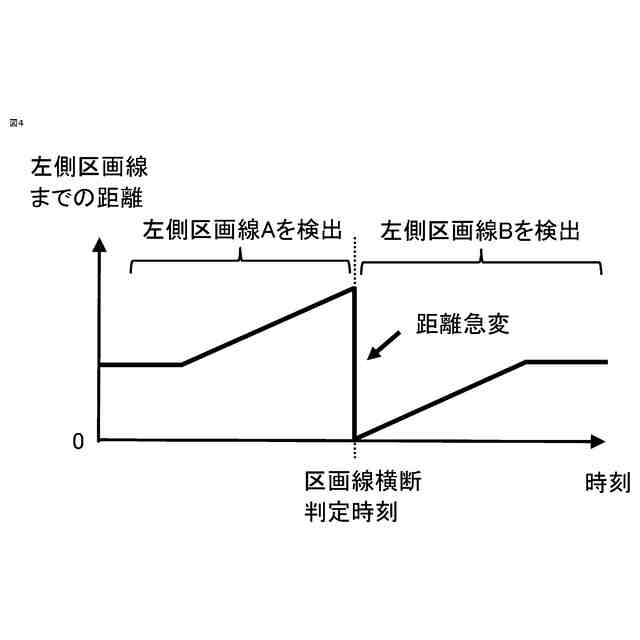
実施の形態1に係る車両のレーン変更に伴う区画線までの距離を示す図である。
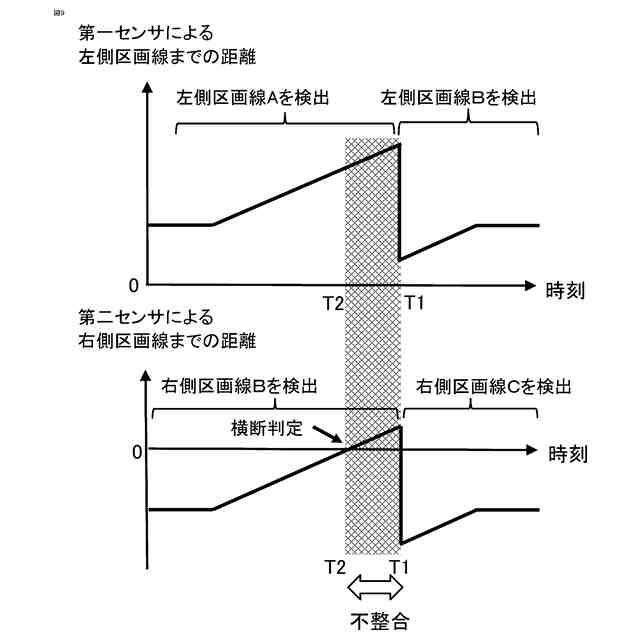
実施の形態1に係る車両のレーン変更に伴う第一センサと第二センサによる区画線までの距離を示す図である。
実施の形態1に係る車両のレーン変更に伴う第一センサと第二センサによる区画線までの距離の整合を示す図である。
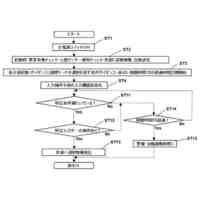
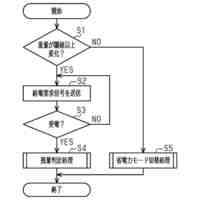
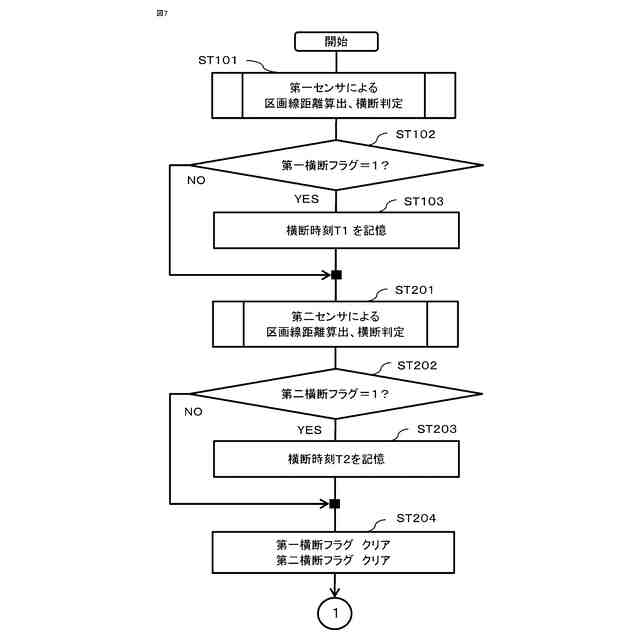
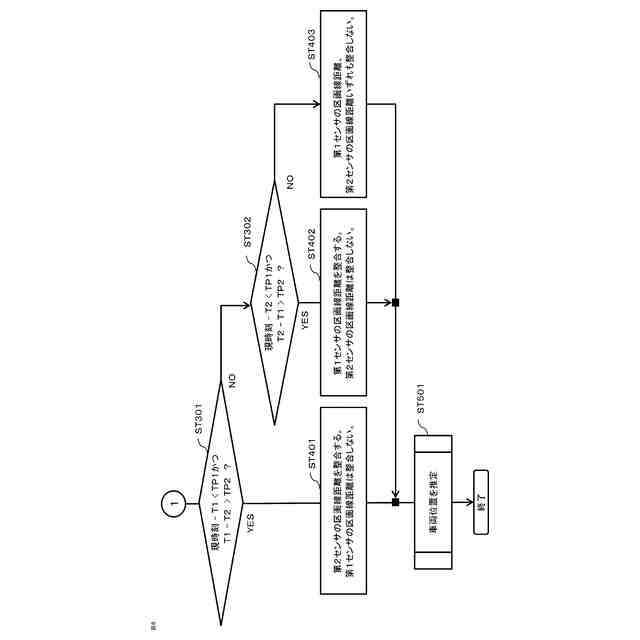
実施の形態1に係る車両位置推定装置の処理を示す第一のフローチャートである。
実施の形態1に係る車両位置推定装置の処理を示す第二のフローチャートである。
実施の形態2に係る車両のレーン変更に伴う第一センサと第二センサによる区画線までの距離を示す図である。
実施の形態2に係る車両のレーン変更に伴う第一センサと第二センサによる区画線までの距離の整合を示す第一の図である。
実施の形態2に係る車両のレーン変更に伴う第一センサと第二センサによる区画線までの距離の整合を示す第二の図である。
実施の形態2に係る車両位置推定装置の処理を示す第一のフローチャートである。
実施の形態2に係る車両位置推定装置の処理を示す第二のフローチャートである。
実施の形態3に係る車両位置推定装置の構成図である。
実施の形態3に係る車両位置推定装置の処理を示す第一のフローチャートである。
実施の形態4に係る車両位置推定装置の構成図である。
実施の形態4に係る車両位置推定装置の処理を示すフローチャートである。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
三菱電機株式会社
半導体装置
6日前
三菱電機株式会社
電力変換装置
今日
三菱電機株式会社
移動体制御装置
今日
三菱電機株式会社
自動運転システム
今日
三菱電機株式会社
ピックアップステージ
6日前
三菱電機株式会社
半導体装置、電力変換装置
6日前
三菱電機株式会社
運転制御装置及び運転制御方法
6日前
三菱電機株式会社
加熱調理器及び加熱調理システム
6日前
三菱電機株式会社
走行支援システム及び走行支援方法
1日前
三菱電機株式会社
無線通信システム、および、学習装置
6日前
三菱電機株式会社
物体検出装置、物体検出システムおよび運転支援システム
今日
三菱電機ビルソリューションズ株式会社
洗浄装置および洗浄方法
6日前
三菱電機株式会社
発光部、光源ユニット及び照明器具
今日
三菱電機株式会社
はんだ噴流の評価装置及び評価システム
今日
三菱電機株式会社
避難所決定装置、エネルギー管理装置、エネルギー管理システム、避難所決定方法およびプログラム
今日
株式会社チノー
放射温度計
8日前
日本精機株式会社
センサユニット
7日前
個人
コンベックスルール用測定部品
14日前
株式会社テイエルブイ
処理装置
1日前
トヨタ自動車株式会社
給水治具
13日前
大和製衡株式会社
組合せ計量装置
6日前
大和製衡株式会社
組合せ計量装置
6日前
大和製衡株式会社
組合せ計量装置
6日前
三菱マテリアル株式会社
温度センサ
13日前
トヨタ自動車株式会社
表示装置
7日前
ニシム電子工業株式会社
液位検出装置
7日前
豊田合成株式会社
重量測定装置
13日前
住友金属鉱山株式会社
検査装置
6日前
住友金属鉱山株式会社
セレン評価方法
6日前
株式会社ティアンドデイ
温度測定装置
13日前
マグネデザイン株式会社
GSR素子の製造方法
1日前
笹田磁気計測研究所株式会社
磁気傾度計
8日前
株式会社ダイナックス
電流検出器
6日前
マグネデザイン株式会社
磁界検出素子の製造方法
1日前
本田技研工業株式会社
外界認識装置
8日前
トヨタ自動車株式会社
情報処理装置
7日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ