TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024059168
公報種別
公開特許公報(A)
公開日
2024-05-01
出願番号
2022166678
出願日
2022-10-18
発明の名称
物体検出装置、物体検出システムおよび運転支援システム
出願人
三菱電機株式会社
代理人
弁理士法人ぱるも特許事務所
主分類
G08G
1/01 20060101AFI20240423BHJP(信号)
要約
【課題】処理負荷を抑制しつつ高い精度で物体を検出する物体検出装置を提供する。
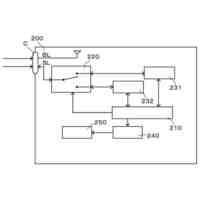
【解決手段】路側に設置された路側センサ10から出力される複数の計測点の位置情報を含む点群データを用いて対象物を検出する物体検出装置20であって、路側センサ10から点群データを取得するデータ取得部21と、データ取得部21から取得した点群データから地面の位置を示す地面データを生成する地面推定部22と、地面データを用いて、データ取得部21から取得した点群データから地面の上の計測点の計測データを除去した地面除去データを生成する地面除去部24と、地面除去データから対象物を検出する物体検出部25とを備え、地面推定部22は、データ取得部21から点群データを取得して地面データを生成する地面推定処理をあらかじめ定められたタイミングで実行する。
【選択図】図2
特許請求の範囲
【請求項1】
路側に設置された路側センサから出力される複数の計測点の位置情報を含む点群データを用いて対象物を検出する物体検出装置であって、
前記路側センサから前記点群データを取得するデータ取得部と、
前記データ取得部から取得した前記点群データから地面の位置を示す地面データを生成して出力する地面推定部と、
前記地面データを記憶する地面データ記憶部と、
前記地面データ記憶部から取得した前記地面データを用いて、前記データ取得部から取得した前記点群データから前記地面の上の計測点の計測データを除去した地面除去データを生成して出力する地面除去部と、
前記地面除去データから前記対象物を検出し、検出結果を対象物検出情報として出力する物体検出部とを備え、
前記地面推定部は、前記データ取得部から前記点群データを取得して前記地面データを生成する地面推定処理をあらかじめ定められたタイミングで実行することを特徴とする物体検出装置。
続きを表示(約 1,200 文字)
【請求項2】
前記地面推定部は、前記データ取得部が初めて前記路側センサから前記点群データを取得したときに前記地面推定処理を実行することを特徴とする請求項1に記載の物体検出装置。
【請求項3】
前記地面推定部は、あらかじめ定められた時間間隔で前記地面推定処理を実行し、
前記地面推定処理の時間間隔は、前記地面除去部が前記データ取得部から前記点群データを取得して前記地面除去データを生成する地面除去処理の時間間隔よりも長いことを特徴とする請求項1に記載の物体検出装置。
【請求項4】
前記地面推定部は、前記路側センサの検出範囲に移動体が存在しないことが確認されたときに前記地面推定処理を実行することを特徴とする請求項1に記載の物体検出装置。
【請求項5】
前記地面推定処理の頻度が、過去に生成された前記地面データの信頼度をもとに決定されることを特徴とする請求項1に記載の物体検出装置。
【請求項6】
前記路側センサに加えられた外乱を測定する外乱センサから外乱値を取得し、前記外乱値の大きさがあらかじめ定められた外乱しきい値を超えたときに外乱検出信号を出力する外乱検出部を備え、
前記地面推定部は、前記外乱検出信号を取得したときに前記地面推定処理を実行することを特徴とする請求項1から5のいずれか1項に記載の物体検出装置。
【請求項7】
前記地面推定部は、信頼度を含む前記地面データを出力し、
前記地面除去部は、前記地面データ記憶部に記憶されている複数の前記地面データの中から前記信頼度が最も高い前記地面データを用いて地面除去データを生成する
ことを特徴とする請求項1から5のいずれか1項に記載の物体検出装置。
【請求項8】
前記地面除去部は、前記地面データ記憶部に記憶されている複数の前記地面データから1つの合成地面データを生成し、前記合成地面データが示す平面を前記地面として地面除去データを生成し、
前記地面データが位置および高さで示されているときは、前記合成地面データにおける指定位置の高さの値は、それぞれの前記地面データにおける前記指定位置の高さの値を平均したものであり、
前記地面データが角度および距離で示されているときは、前記合成地面データにおける指定角度における距離の値は、それぞれの前記地面データにおける前記指定角度における距離の値を平均したものであることを特徴とする請求項1から5のいずれか1項に記載の物体検出装置。
【請求項9】
前記路側センサと、
請求項1から5のいずれか1項に記載の物体検出装置とを備えた物体検出システム。
【請求項10】
前記路側センサと、
前記外乱センサと、
請求項6に記載の物体検出装置とを備えた物体検出システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本願は、物体検出装置、物体検出システムおよび運転支援システムに関するものである。
続きを表示(約 2,600 文字)
【背景技術】
【0002】
路側に設置されているLiDAR(Light Detection and Ranging)あるいはステレオカメラなどの路側センサを用いて、歩道に存在する通行人および車道に存在する車両および障害物などの物体を検出し、検出結果を用いて車両の運転を支援する技術が開発されている。路側センサを用いて物体を検出するときに、路側センサが取得した点群データから地面上の計測点の計測データを除去することによって物体の検出精度を高めることができる。例えば、路側センサが取得した点群データから地面上の計測点の計測データを除去する方法として、地面推定処理を実施せずに路側センサが取得した点群データにおいて所定の高さ以下の計測点データを地面上の計測点の計測データとして除去する方法、あるいは、路側センサが点群データを取得するごとにRANSAC(Random Sampling Consensus)アルゴリズムを用いて地面推定する方法が提案されている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開2021-43475号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に示された物体検出装置において、路側センサが取得した点群データにおいて所定の高さ以下の計測点データを地面上の計測点の計測データとして除去する方法を用いると、処理負荷は小さいものの地面上の計測点の計測データを除去する精度が低くなり、路側センサが点群データを取得するごとにRANSACアルゴリズムによる方法を用いて地面推定をすると、地面推定の精度は高いものの処理負荷が大きくなり、いずれの方法においても処理負荷を抑制しつつ高い精度で物体を検出することができないという課題があった。
【0005】
本願は、上述の課題を解決するためになされたものであり、処理負荷を抑制しつつ高い精度で物体を検出する物体検出装置、物体検出システムおよび運転支援システムを提供することと目的とする。
【課題を解決するための手段】
【0006】
本願に開示される物体検出装置は、路側に設置された路側センサから出力される複数の計測点の位置情報を含む点群データを用いて対象物を検出する物体検出装置であって、路側センサから点群データを取得するデータ取得部と、データ取得部から取得した点群データから地面の位置を示す地面データを生成して出力する地面推定部と、地面データを記憶する地面データ記憶部と、地面データ記憶部から取得した地面データを用いて、データ取得部から取得した点群データから地面の上の計測点の計測データを除去した地面除去データを生成して出力する地面除去部と、地面除去データから対象物を検出し、検出結果を対象物検出情報として出力する物体検出部とを備え、地面推定部は、データ取得部から点群データを取得して地面データを生成する地面推定処理をあらかじめ定められたタイミングで実行することを特徴とする。
【発明の効果】
【0007】
本願に開示される物体検出装置は、路側に設置された路側センサから出力される複数の計測点の位置情報を含む点群データを用いて対象物を検出する物体検出装置であって、路側センサから点群データを取得するデータ取得部と、データ取得部から取得した点群データから地面の位置を示す地面データを生成して出力する地面推定部と、地面データを記憶する地面データ記憶部と、地面データ記憶部から取得した地面データを用いて、データ取得部から取得した点群データから地面の上の計測点の計測データを除去した地面除去データを生成して出力する地面除去部と、地面除去データから対象物を検出し、検出結果を対象物検出情報として出力する物体検出部とを備え、地面推定部は、データ取得部から点群データを取得して地面データを生成する地面推定処理をあらかじめ定められたタイミングで実行するので、処理負荷を抑制しつつ高い精度で物体を検出することができる。
【図面の簡単な説明】
【0008】
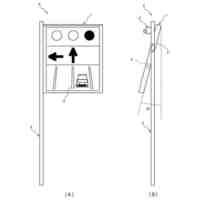
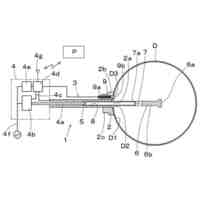
路側センサおよび検出する物体の例を示す図である。
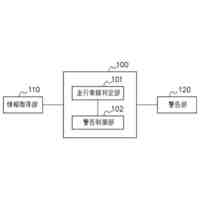
実施の形態1による物体検出装置の構成を示すブロック図である。
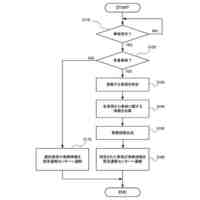
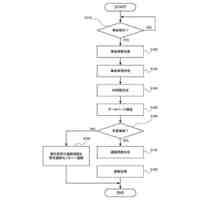
実施の形態1による物体検出装置の動作を説明するフローチャートである。
実施の形態2による物体検出装置の構成を示すブロック図である。
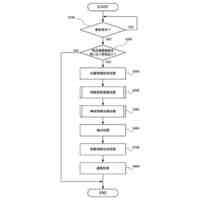
実施の形態2による物体検出装置の動作を説明するフローチャートである。
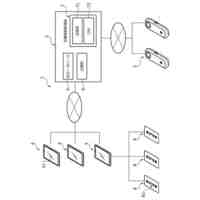
実施の形態3による物体検出システムの構成を示すブロック図である。
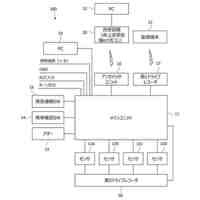
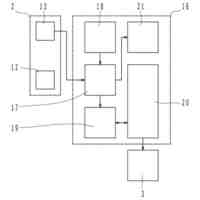
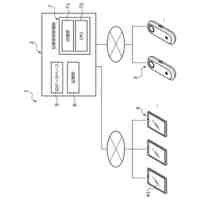
実施の形態1による物体検出システムのハードウェア構成の一例を示す模式図である。
実施の形態1による物体検出システムのハードウェア構成の別の一例を示す模式図である。
実施の形態2による物体検出システムのハードウェア構成の一例を示す模式図である。
実施の形態2による物体検出システムのハードウェア構成の別の一例を示す模式図である。
実施の形態3による運転支援情報生成装置のハードウェア構成の一例を示す模式図である。
実施の形態3による運転支援情報生成装置のハードウェア構成の別の一例を示す模式図である。
【発明を実施するための形態】
【0009】
以下、本願を実施するための実施の形態に係る物体検出装置、物体検出システムおよび運転支援システムについて、図面を参照して詳細に説明する。なお、各図において同一符号は同一もしくは相当部分を示している。
【0010】
実施の形態1.
図1は、路側センサ10および検出する物体の例を示す図である。路側センサ10は、例えば、路上から数メートルの高さに、物体を検出する範囲をカバーするように姿勢が固定された状態で設置される。路側センサ10は、例えば、LiDARあるいはステレオカメラである。路側センサ10は、例えば、検知エリアの地面103の上にある歩行者101あるいは車両102を検出するためのものである。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
三菱電機株式会社
冷却装置
4日前
三菱電機株式会社
静止誘導器
5日前
三菱電機株式会社
半導体装置
今日
三菱電機株式会社
無線センサ装置
6日前
三菱電機株式会社
車両追跡システム
今日
三菱電機株式会社
換気空気清浄システム
6日前
三菱電機株式会社
冷蔵庫および冷蔵庫システム
5日前
三菱電機株式会社
半導体装置およびその製造方法
6日前
三菱電機株式会社
車両制御装置及び車両制御方法
4日前
三菱電機株式会社
攪拌板、攪拌装置および冷却装置
4日前
三菱電機株式会社
データ処理装置及びデータ処理方法
5日前
三菱電機株式会社
保護リレー装置、および保護システム
今日
三菱電機株式会社
半導体製造装置および半導体装置の製造方法
5日前
三菱電機株式会社
伸縮式パンタグラフ機構を用いた宇宙用展開構造物
5日前
三菱電機株式会社
無線通信システム、固定局端末、および、移動局端末
4日前
三菱電機株式会社
線状体保持機構、照明装置、接続方法、および、保持方法
1日前
三菱電機株式会社
遠心送風機
今日
三菱電機株式会社
ロケット打上支援システム
今日
三菱電機株式会社
ロケット、およびロケット打上方法
今日
個人
非常放送システム
26日前
個人
飛行体衝突回避装置
1か月前
個人
自動操舵制御システム
2か月前
個人
バス送迎支援システム
1か月前
株式会社SUBARU
車両
2か月前
日本精機株式会社
車両用計器装置
2か月前
株式会社SUBARU
車両
2か月前
株式会社ユピテル
システム等
4日前
スズキ株式会社
車線案内装置
11日前
株式会社知財事業研究所
信号機
2か月前
株式会社SUBARU
サーバ装置
2か月前
能美防災株式会社
警報器
1か月前
能美防災株式会社
表示灯
1か月前
株式会社アガタ
閉空間監視装置
1か月前
個人
配車システム
1か月前
トヨタ自動車株式会社
制御装置
20日前
個人
配車システム
1か月前
続きを見る
他の特許を見る











 特許ウォッチ
特許ウォッチ