TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024058745
公報種別
公開特許公報(A)
公開日
2024-04-30
出願番号
2022166029
出願日
2022-10-17
発明の名称
走行支援システム及び走行支援方法
出願人
三菱電機株式会社
代理人
弁理士法人ぱるも特許事務所
主分類
G08G
1/16 20060101AFI20240422BHJP(信号)
要約
【課題】大まかな合流車両の合流行動に即した大まかな走行支援と、対象車両と合流車両との衝突を回避する走行支援と、を状況に応じて切り替えることができる走行支援システム及び走行支援方法を提供する。
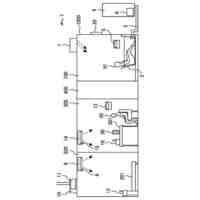
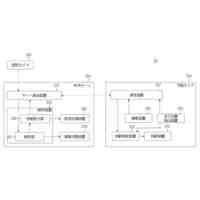
【解決手段】合流行動の予測結果に基づいて、合流時の走行が円滑になるように、対象車両の走行を支援する合流支援部と、対象車両及び合流車両の移動の予測結果に基づいて、衝突リスクを算出し、衝突リスクが低減するように対象車両の走行を支援する衝突回避支援部と、合流支援部の走行支援と衝突回避支援部の走行支援とのいずれを実施するかを決定する走行支援選択部と、を備えた走行支援システム。
【選択図】図1
特許請求の範囲
【請求項1】
対象車両の移動情報と、前記対象車両が走行している対象車線に合流する合流車線を走行している合流車両の移動情報と、前記対象車線の車線情報と、前記合流車線の車線情報と、を取得する情報取得部と、
前記対象車両の移動情報、前記合流車両の移動情報、前記対象車線の車線情報、及び前記合流車線の車線情報に基づいて、前記合流車両の前記対象車線への合流行動を予測する合流行動予測部と、
前記合流行動の予測結果に基づいて、合流時の走行が円滑になるように、少なくとも前記対象車両の走行を支援する合流支援部と、
前記対象車両の移動情報、前記合流車両の移動情報、前記対象車線の車線情報、及び前記合流車線の車線情報に基づいて、前記対象車両の移動と前記合流車両の移動を予測する移動予測部と、
前記対象車両の移動の予測結果及び前記合流車両の移動の予測結果に基づいて、前記対象車両と前記合流車両との衝突リスクを算出し、前記衝突リスクが低減するように、少なくとも前記対象車両の走行を支援する衝突回避支援部と、
前記合流支援部の走行支援と前記衝突回避支援部の走行支援とのいずれを実施するかを決定し、決定した前記合流支援部又は前記衝突回避支援部に走行支援を行わせる走行支援選択部と、
を備えた走行支援システム。
続きを表示(約 1,300 文字)
【請求項2】
前記合流行動予測部は、各車両の移動の予測結果に基づく前記衝突リスクを算出せずに、前記合流行動を予測する請求項1に記載の走行支援システム。
【請求項3】
前記合流行動予測部は、少なくとも前記合流車両の位置及び速度の一方又は双方の特徴量を入力とし、前記対象車両に対する前側又は後側の前記合流車両の合流位置の予測結果を出力する予測モデルを用いて、前記合流行動を予測する請求項1に記載の走行支援システム。
【請求項4】
前記合流支援部は、前記合流行動の予測結果に基づいて、合流時の前記対象車両と前記合流車両との車間距離を確保できるように、少なくとも前記対象車両の走行を支援する請求項1に記載の走行支援システム。
【請求項5】
前記衝突回避支援部は、各時点において、前記対象車両の位置と前記合流車両の位置との距離を算出し、各時点の距離に基づいて各時点の前記衝突リスクを算出し、各時点の前記衝突リスクが低下するように、少なくとも前記対象車両の走行を支援する請求項1に記載の走行支援システム。
【請求項6】
前記移動予測部は、各時点において、前記対象車両が位置する可能性のある移動位置範囲、及び前記合流車両が位置する可能性のある移動位置範囲を予測し、
前記衝突回避支援部は、各時点において、前記対象車両の移動位置範囲と前記合流車両の移動位置範囲との重なり度合い又は離間度合いを算出し、各時点の前記重なり度合い又は前記離間度合いに基づいて各時点の前記衝突リスクを算出し、各時点の前記衝突リスクが低下するように、少なくとも前記対象車両の走行を支援する請求項1に記載の走行支援システム。
【請求項7】
前記移動予測部は、前記合流車両が取りうる複数の移動パターンの中から選択確率が高い移動パターンを選択し、選択した移動パターンを前提とする前記合流車両の移動を予測する請求項1に記載の走行支援システム。
【請求項8】
前記走行支援選択部は、前記合流車両の位置と、前記対象車線及び前記合流車線の合流地点の位置との位置関係に基づいて、前記合流支援部の走行支援と前記衝突回避支援部の走行支援とのいずれを実施するかを決定する請求項1に記載の走行支援システム。
【請求項9】
前記走行支援選択部は、前記合流車両の位置と前記合流地点の位置との位置関係に基づいて、前記合流車両が、前記合流地点に到達する到達予測時間を予測し、前記到達予測時間に基づいて、前記合流支援部の走行支援と前記衝突回避支援部の走行支援とのいずれを実施するかを決定する請求項8に記載の走行支援システム。
【請求項10】
前記走行支援選択部は、前記合流車両の位置と前記合流地点の位置との位置関係に基づいて、前記合流車両が前記対象車線及び前記合流車線の合流地点に停止できる停止可能性を判定し、前記停止可能性に基づいて、前記合流支援部の走行支援と前記衝突回避支援部の走行支援とのいずれを実施するかを決定する請求項8に記載の走行支援システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
この本願は、走行支援システム及び走行支援方法に関するものである。
続きを表示(約 2,700 文字)
【背景技術】
【0002】
特許文献1には、自車両と周辺車両との位置関係と横位置に基づいて他車両の割り込みを予測する技術が開示されている。また、特許文献1には、変形例として合流などの道路要因に基づく割り込みの予測方法が開示されている。また、特許文献2には、合流車両の状態に応じて自車両と自車両の前側の車両との車間距離を短くする動作と、長くする動作を変化させる技術が開示されている。
【先行技術文献】
【特許文献】
【0003】
特許第6494121号
特開2021-014175号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、自車両が、車線の合流部を安全に通過するための走行支援を行うには、合流車両の状況に応じた予測が必要になる。例えば、合流車両が合流車線の終端から離れている状況では、法規及び譲り合い行動などの様々な要因による大まかな合流車両の合流行動の予測と大まかな自車両の走行支援が求められる。一方、合流車両が合流地点に近づいた状況では、自車両と合流車両との衝突の可能性が高まるため、合流車両の移動と自車両の移動とを比較的厳密に予測し、衝突を回避するような、比較的厳密な走行支援が求められる。
【0005】
しかし、特許文献1の技術では、合流車両、周辺車両、合流車線の終端における仮想車両の縦方向位置関係、及び合流車両の横位置に基づいて、比較的厳密に合流確率を予測している。しかし、上述のように、状況によっては、法規及び譲り合い等の要因による大まかな合流行動が発生するが、特許文献1のように比較的厳密に予測する技術では、大まかな合流行動を予測することは困難である。
【0006】
また、特許文献2の技術では、合流車両の状態に応じて、自車両の前後の車間距離を短くしたり、長くしたりしているが、法規及び譲り合い等の要因による大まかな合流行動を予測しているわけでない。
【0007】
そこで、本願は、大まかな合流車両の合流行動に即した大まかな走行支援と、対象車両と合流車両との衝突を回避する走行支援と、を状況に応じて切り替えることができる走行支援システム及び走行支援方法を提供することを目的とする。
【課題を解決するための手段】
【0008】
本願に係る走行支援システムは、
対象車両の移動情報と、前記対象車両が走行している対象車線に合流する合流車線を走行している合流車両の移動情報と、前記対象車線の車線情報と、前記合流車線の車線情報と、を取得する情報取得部と、
前記対象車両の移動情報、前記合流車両の移動情報、前記対象車線の車線情報、及び前記合流車線の車線情報に基づいて、前記合流車両の前記対象車線への合流行動を予測する合流行動予測部と、
前記合流行動の予測結果に基づいて、合流時の走行が円滑になるように、少なくとも前記対象車両の走行を支援する合流支援部と、
前記対象車両の移動情報、前記合流車両の移動情報、前記対象車線の車線情報、及び前記合流車線の車線情報に基づいて、前記対象車両の移動と前記合流車両の移動を予測する移動予測部と、
前記対象車両の移動の予測結果及び前記合流車両の移動の予測結果に基づいて、前記対象車両と前記合流車両との衝突リスクを算出し、前記衝突リスクが低減するように、少なくとも前記対象車両の走行を支援する衝突回避支援部と、
前記合流支援部の走行支援と前記衝突回避支援部の走行支援とのいずれを実施するかを決定し、決定した前記合流支援部又は前記衝突回避支援部に走行支援を行わせる走行支援選択部と、
を備えたものである。
【0009】
本願に係る走行支援方法は、
対象車両の移動情報と、前記対象車両が走行している対象車線に合流する合流車線を走行している合流車両の移動情報と、前記対象車線の車線情報と、前記合流車線の車線情報と、を取得する情報取得ステップと、
前記対象車両の移動情報、前記合流車両の移動情報、前記対象車線の車線情報、及び前記合流車線の車線情報に基づいて、前記合流車両の前記対象車線への合流行動を予測する合流行動予測ステップと、
前記合流行動の予測結果に基づいて、合流時の走行が円滑になるように、少なくとも前記対象車両の走行を支援する合流支援ステップと、
前記対象車両の移動情報、前記合流車両の移動情報、前記対象車線の車線情報、及び前記合流車線の車線情報に基づいて、前記対象車両の移動と前記合流車両の移動を予測する移動予測ステップと、
前記対象車両の移動の予測結果及び前記合流車両の移動の予測結果に基づいて、前記対象車両と前記合流車両との衝突リスクを算出し、前記衝突リスクが低減するように、少なくとも前記対象車両の走行を支援する衝突回避支援ステップと、
前記合流支援ステップの走行支援と前記衝突回避支援ステップの走行支援とのいずれを実施するかを決定し、決定した前記合流支援ステップ又は前記衝突回避支援ステップに走行支援を行わせる走行支援選択ステップと、
を備えたものである。
【発明の効果】
【0010】
本願に係る走行支援システム及び走行支援方法によれば、合流行動予測部により合流車両の対象車線への合流行動が予測され、合流支援部により、合流行動の予測結果に基づいて、合流時の走行が円滑になるように、少なくとも対象車両の走行が支援される。よって、合流行動予測部及び合流支援部により、大まかな合流行動の予測結果に基づいて、合流時の走行が円滑になるような大まかな走行支援が行われる。一方、移動予測部により対象車両の移動と合流車両の移動が予測され、衝突回避支援部により、対象車両及び合流車両の移動の予測結果に基づいて、対象車両と合流車両との衝突リスクが算出され、衝突リスクが低減するように、少なくとも対象車両の走行が支援される。よって、移動予測部及び衝突回避支援部により、各車両の移動に基づく衝突リスクを算出することにより、より確実に衝突を回避するような走行支援が行われる。そして、支援選択部が合流支援部の走行支援と衝突回避支援部の走行支援とのいずれを実施するかを決定することにより、状況に応じて、合流時の走行が円滑になる大まかな走行支援と、確実に衝突を回避する走行支援と、を適切に切り替えることができる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
三菱電機株式会社
送信機
1か月前
三菱電機株式会社
表示装置
19日前
三菱電機株式会社
照明器具
6日前
三菱電機株式会社
照明器具
26日前
三菱電機株式会社
冷却装置
4日前
三菱電機株式会社
加熱調理器
1か月前
三菱電機株式会社
電気掃除機
7日前
三菱電機株式会社
半導体装置
26日前
三菱電機株式会社
静止誘導器
5日前
三菱電機株式会社
電気掃除機
11日前
三菱電機株式会社
電力変換器
1か月前
三菱電機株式会社
回路遮断器
1か月前
三菱電機株式会社
半導体装置
1か月前
三菱電機株式会社
半導体装置
今日
三菱電機株式会社
空調システム
12日前
三菱電機株式会社
制御システム
1か月前
三菱電機株式会社
電子制御装置
12日前
三菱電機株式会社
電力変換装置
8日前
三菱電機株式会社
電力変換装置
12日前
三菱電機株式会社
電力変換装置
7日前
三菱電機株式会社
電動駆動装置
27日前
三菱電機株式会社
電力変換装置
20日前
三菱電機株式会社
電動駆動装置
27日前
三菱電機株式会社
電力変換装置
19日前
三菱電機株式会社
監視システム
1か月前
三菱電機株式会社
移動体制御装置
20日前
三菱電機株式会社
無線センサ装置
6日前
三菱電機株式会社
空気調和システム
1か月前
三菱電機株式会社
電力用半導体装置
11日前
三菱電機株式会社
車両追跡システム
今日
三菱電機株式会社
車両位置推定装置
1か月前
三菱電機株式会社
半導体レーザ装置
8日前
三菱電機株式会社
空調制御システム
26日前
三菱電機株式会社
自動運転システム
20日前
三菱電機株式会社
照明制御システム
1か月前
三菱電機株式会社
回転電機の制御装置
19日前
続きを見る
他の特許を見る










 特許ウォッチ
特許ウォッチ