TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024056151
公報種別
公開特許公報(A)
公開日
2024-04-23
出願番号
2022162298
出願日
2022-10-07
発明の名称
外界認識装置
出願人
本田技研工業株式会社
代理人
個人
,
個人
主分類
G01S
17/89 20200101AFI20240416BHJP(測定;試験)
要約
【課題】処理負荷を低減しつつ、車両周囲の外界状況を精度よく認識すること。
【解決手段】外界認識装置50は、アクチュエータACの動作を制御する走行制御部115を有する自車両の周囲に電磁波を照射して反射波に基づき自車両の周囲の外界状況を検出するライダ5と、反射波が得られる物体の表面の計測点の位置情報を含む点群データを取得するデータ取得部111と、データ取得部111により取得された点群データに基づき自車両の前方の物体を認識するとともに、自車両と物体との位置関係に基づいて、物体に対応する計測点の中から走行制御部115で用いられる着目点を決定する決定部113と、を備える。データ取得部111は、決定部113により決定された着目点の周囲の点群データの密度が大きくなるように点群データを取得する。
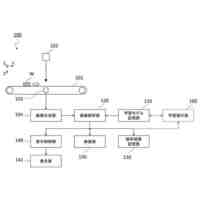
【選択図】図2
特許請求の範囲
【請求項1】
走行用アクチュエータの動作を制御する走行制御部を有する自車両の周囲に電磁波を照射して反射波に基づき前記自車両の周囲の外界状況を検出する車載検出器と、
前記反射波が得られる物体の表面の計測点の位置情報を含む点群データを取得するデータ取得部と、
前記データ取得部により取得された前記点群データに基づき前記自車両の前方の前記物体を認識するとともに、前記自車両と前記物体との位置関係に基づいて、前記物体に対応する前記計測点の中から前記走行制御部で用いられる着目点を決定する決定部と、を備え、
前記データ取得部は、前記決定部により決定された前記着目点の周囲の前記点群データの密度が大きくなるように前記点群データを取得することを特徴とする外界認識装置。
続きを表示(約 1,100 文字)
【請求項2】
請求項1に記載の外界認識装置において、
前記決定部は、前記計測点のうち前記自車両との距離が最も短い第1計測点と進行方向において前記自車両から最も離れた第2計測点とを、前記着目点として決定することを特徴とする外界認識装置。
【請求項3】
請求項2に記載の外界認識装置において、
前記決定部は、前記データ取得部により取得された前記点群データに基づき前記自車両の前方に複数の物体が認識されたとき、前記第1計測点が前記自車両から進行方向に第1所定距離以上離れていて且つ前記第1計測点が前記自車両から車幅方向に第2所定距離以上離れている前記物体を除外対象物体として決定し、前記複数の物体から前記除外対象物体を除いた前記物体の、前記第1計測点と前記第2計測点とを前記着目点として決定することを特徴とする外界認識装置。
【請求項4】
請求項3に記載の外界認識装置において、
前記決定部はさらに、前記複数の物体から前記除外対象物体を除いた前記物体に第1物体と第2物体とが含まれ、前記第1物体の前記第1計測点が前記第2物体の前記第1計測点よりも進行方向かつ車幅方向において遠方にあるとき、前記第1物体を前記除外対象物体として決定することを特徴とする外界認識装置。
【請求項5】
請求項1から4のうちのいずれか1項に記載の外界認識装置において、
前記車載検出器は、ライダであることを特徴とする外界認識装置。
【請求項6】
請求項5に記載の外界認識装置において、
前記着目点の周囲の前記点群データの密度が大きくなるように前記車載検出器の照射位置を設定する設定部をさらに備えることを特徴とする外界認識装置。
【請求項7】
請求項5に記載の外界認識装置において、
前記データ取得部は、第1データ取得部であり、
前記点群データは、第1点群データであり、
前記第1データ取得部により取得された前記第1点群データのデータを間引いて前記第1点群データよりもデータ密度が小さい第2点群データを取得する第2データ処理部をさらに備え、
前記決定部は、前記第2データ処理部により取得された前記第2点群データに基づき前記自車両の前方の前記物体を認識するとともに、前記自車両と前記物体との位置関係に基づいて、前記物体に対応する前記計測点の中から前記着目点を決定し、
前記走行制御部は、前記第2点群データと、前記決定部により決定された前記着目点の周囲の前記第1点群データとを用いて、前記走行用アクチュエータの動作を制御することを特徴とする外界認識装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、車両の外界状況を認識する外界認識装置に関する。
続きを表示(約 2,200 文字)
【背景技術】
【0002】
この種の装置として、ライダのレーザ光を動的に操縦して不均一な密度のレーザパルスパターンを視野角内の特定の領域で生成する装置が知られている(例えば特許文献1参照)。特許文献1記載の装置では、物体の境界線の検出精度を高めるように、物体が存在すると推定される領域に対して高密度なレーザパルスパターンを生成する。
【先行技術文献】
【特許文献】
【0003】
特許第6860656号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1記載の装置のように、領域単位でレーザパルスを粗密制御したのでは、計測点数を必要以上に増大させるおそれがある。
【課題を解決するための手段】
【0005】
本発明の一態様である外界認識装置は、走行用アクチュエータの動作を制御する走行制御部を有する自車両の周囲に電磁波を照射して反射波に基づき自車両の周囲の外界状況を検出する車載検出器と、反射波が得られる物体の表面の計測点の位置情報を含む点群データを取得するデータ取得部と、データ取得部により取得された点群データに基づき自車両の前方の物体を認識するとともに、自車両と物体との位置関係に基づいて、物体に対応する計測点の中から走行制御部で用いられる着目点を決定する決定部と、を備える。データ取得部は、決定部により決定された着目点の周囲の点群データの密度が大きくなるように点群データを取得する。
【発明の効果】
【0006】
本発明によれば、処理負荷を低減しつつ、車両周囲の外界状況を精度よく認識できる。
【図面の簡単な説明】
【0007】
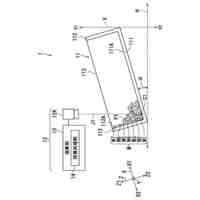
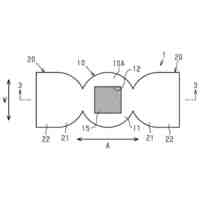
自車両の前方の外界状況の一例を示す図。
ライダの角度分解能を説明するための図。
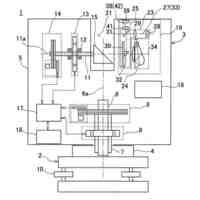
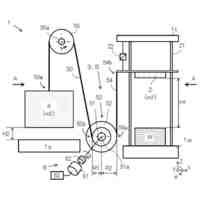
車両制御装置の要部構成を示すブロック図。
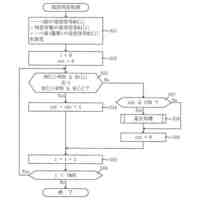
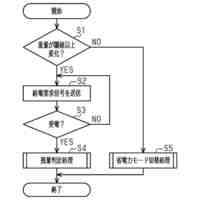
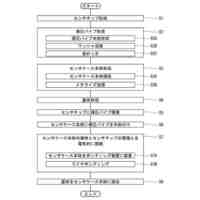
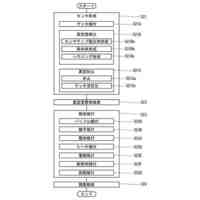
図2のコントローラのCPUで実行される処理の一例を示すフローチャート。
計測点を模式的に示す図。
クラスタリングされた点群データの一例を示す図。
最近傍点の抽出方法を説明するための図。
最近傍点の抽出方法を説明するための図。
対象クラスタの決定方法を説明するための図。
最近傍点の進行中央線に対する角度を説明するための図。
最遠点の一例を示す図。
追加照射位置の算出方法を説明するための図。
追加照射位置の算出方法を説明するための図。
【発明を実施するための形態】
【0008】
以下に、図面を参照して本発明の実施の形態について説明する。本発明の実施の形態に係る外界認識装置は、自動運転機能を有する車両、すなわち自動運転車両に適用することができる。なお、本実施形態に係る外界認識装置が適用される車両を、他車両と区別して自車両と呼ぶことがある。自車両は、内燃機関(エンジン)を走行駆動源として有するエンジン車両、走行モータを走行駆動源として有する電気自動車、エンジンと走行モータとを走行駆動源として有するハイブリッド車両のいずれであってもよい。自車両は、ドライバによる運転操作が不要な自動運転モードでの走行だけでなく、ドライバの運転操作による手動運転モードでの走行も可能である。
【0009】
自動運転車両は、自動運転モードでの走行(以下、自動走行または自律走行と呼ぶ)時、カメラやライダ(LiDAR:Light Detection and Ranging)等の車載検出器の検出データに基づき自車両の周囲の外界状況を認識する。自動運転車両は、その認識結果に基づいて、現時点から所定時間先の走行軌道(目標軌道)を生成し、目標軌道に沿って自車両が走行するように走行用アクチュエータを制御する。
【0010】
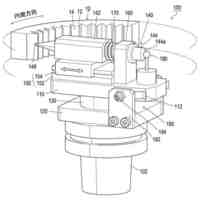
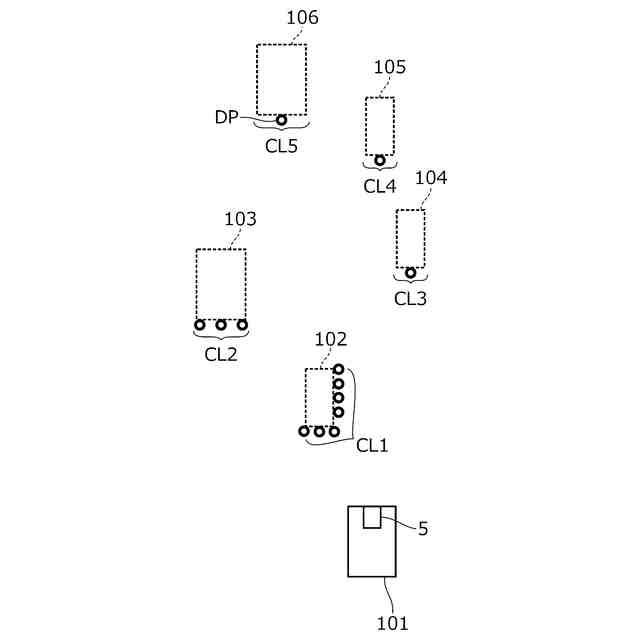
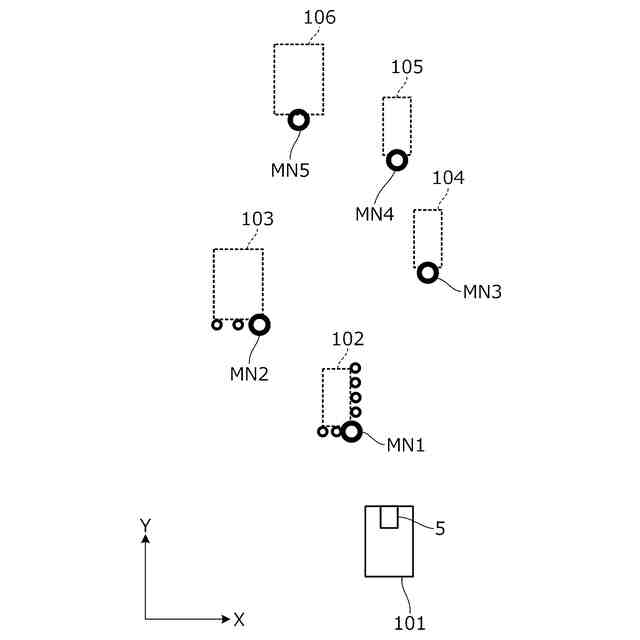
図1Aは、自動運転車両である自車両の前方の外界状況の一例を示す図である。自車両は左側通行の片側二車線(車線LN1,LN2)の道路RDの車線LN2を走行中であり、自車両の前方を他車両102~106が走行中である。他車両103,106は、車線LN1を走行中であり、他車両102,104,105は、車線LN2を走行中である。他車両102,104,105は、二輪車両である。自車両に搭載されたライダにより照射された電磁波(レーザ光など)が物体の表面のある1点(計測点)で反射して返ってくることで、レーザ源からその点までの距離、反射して返ってきた電磁波の強度、その計測点に位置する物体の相対速度、などが計測される。自車両が走行する道路RDに対して水平方向と垂直方向とにレーザを走査することで、自車両前方の他車両102~106の位置や相対速度を認識できる。図1Bは、ライダの角度分解能を説明するための図である。図1Bの丸印IPはライダの照射位置を模式的に表し、照射位置の左右方向の間隔が水平方向の角度分解能に相当し、照射位置の上下方向の間隔が垂直方向の角度分解能に相当する。自車両101は、ライダによって所定の時間間隔(ライダのフレームレートにより定まる時間間隔)で取得された計測点の情報(点群データ)に基づいて自車両の周囲の外界状況、より具体的には自車両前方の交通参加者や構造物等の物体を認識し、その認識結果に基づいて走行制御を行う。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
健康状態検査材
19日前
株式会社CCT
表示装置
18日前
株式会社トプコン
測量装置
24日前
株式会社トプコン
測定装置
25日前
株式会社チノー
放射温度計
11日前
ニデック株式会社
検出装置
25日前
株式会社トプコン
測量装置
24日前
日本精機株式会社
車両用表示装置
25日前
日本精機株式会社
センサユニット
10日前
個人
コンベックスルール用測定部品
17日前
本多電子株式会社
水中探知装置
25日前
トヨタ自動車株式会社
給水治具
16日前
株式会社テイエルブイ
処理装置
4日前
東将精工株式会社
測定器具補助具
18日前
TDK株式会社
ガスセンサ
2日前
大和製衡株式会社
組合せ計量装置
9日前
大和製衡株式会社
組合せ計量装置
9日前
大和製衡株式会社
組合せ計量装置
9日前
株式会社ミツトヨ
光学式エンコーダ
19日前
三菱マテリアル株式会社
温度センサ
16日前
中部電力株式会社
スミヤ濾紙
24日前
東レエンジニアリング株式会社
衝撃試験機
19日前
株式会社ティアンドデイ
温度測定装置
16日前
豊田合成株式会社
重量測定装置
16日前
住友金属鉱山株式会社
検査装置
9日前
日立建機株式会社
作業機械
23日前
住友金属鉱山株式会社
セレン評価方法
9日前
トヨタ自動車株式会社
表示装置
10日前
ニシム電子工業株式会社
液位検出装置
10日前
株式会社 システムスクエア
検査装置
18日前
太陽誘電株式会社
匂いセンサシステム
2日前
東レ株式会社
センサー素子及びガスセンサー
23日前
マグネデザイン株式会社
GSR素子の製造方法
4日前
株式会社不二越
歯車寸法測定装置
18日前
アズビル株式会社
圧力センサの製造方法
24日前
アズビル株式会社
隔膜真空計の製造方法
24日前
続きを見る
他の特許を見る








 特許ウォッチ
特許ウォッチ