TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024017707
公報種別
公開特許公報(A)
公開日
2024-02-08
出願番号
2022120528
出願日
2022-07-28
発明の名称
肩部訓練装置
出願人
国立大学法人山梨大学
,
AB情報システム株式会社
代理人
SK弁理士法人
,
個人
,
個人
主分類
A61H
1/02 20060101AFI20240201BHJP(医学または獣医学;衛生学)
要約
【課題】肩甲骨部及び肩関節の両方の動きを取り入れた肩部訓練装置を提供する。
【解決手段】本発明によれば、肩甲骨部及び肩関節の他動運動を行う肩部訓練装置であって、肩甲骨部ホルダと、上腕ホルダと、肩甲骨部駆動手段と、肩関節駆動手段とを備え、前記肩甲骨部ホルダは、使用者の肩甲骨に沿って装着可能とされ、前記上腕ホルダは、前記使用者の上腕に沿って装着可能とされ、前記肩甲骨部駆動手段は、前記肩甲骨部ホルダを動作させることで前記肩甲骨部の他動運動を再現し、前記肩関節駆動手段は、前記上腕ホルダを動作させることで前記肩関節の他動運動を再現する、肩部訓練装置が提供される。
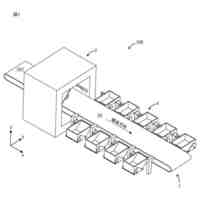
【選択図】図1
特許請求の範囲
【請求項1】
肩甲骨部及び肩関節の他動運動を行う肩部訓練装置であって、
肩甲骨部ホルダと、上腕ホルダと、肩甲骨部駆動手段と、肩関節駆動手段とを備え、
前記肩甲骨部ホルダは、使用者の肩甲骨に沿って装着可能とされ、
前記上腕ホルダは、前記使用者の上腕に沿って装着可能とされ、
前記肩甲骨部駆動手段は、前記肩甲骨部ホルダを動作させることで前記肩甲骨部の他動運動を再現し、
前記肩関節駆動手段は、前記上腕ホルダを動作させることで前記肩関節の他動運動を再現する、肩部訓練装置。
続きを表示(約 1,700 文字)
【請求項2】
請求項1に記載の肩部訓練装置であって、
前記肩甲骨部駆動手段は、前記肩甲骨部ホルダの位置及び姿勢を変更することにより、前記肩甲骨部の屈曲・伸展、挙上・引き下げの四つの他動運動を再現する、肩部訓練装置。
【請求項3】
請求項2に記載の肩部訓練装置であって、
前記肩甲骨部駆動手段は、パラレルリンク機構を備え、当該パラレルリンク機構により、前記肩甲骨部ホルダの位置及び姿勢を変更する、肩部訓練装置。
【請求項4】
請求項3に記載の肩部訓練装置であって、
前記パラレルリンク機構は、第1モータと、第2モータと、第1アームと、第2アームとを備え、
前記第1モータは、前記第1アームの基端側と接続されるとともに、当該第1アームを回動させるよう構成され、
前記第2モータは、前記第2アームの基端側と接続されるとともに、当該第2アームを回動させるよう構成され、
前記第1アーム及び前記第2アームは、それぞれ一対のリンクがボールジョイントによって連結されて構成されるとともに、その先端部が前記肩甲骨部ホルダに接続されており、
前記パラレルリンク機構は、前記第1モータ及び前記第2モータを駆動することにより、前記肩甲骨部ホルダの位置及び姿勢を変更する、肩部訓練装置。
【請求項5】
請求項4に記載の肩部訓練装置であって、
前記第1モータと前記第2モータは、それぞれの回転軸が略垂直になるよう配置される、肩部訓練装置。
【請求項6】
請求項5に記載の肩部訓練装置であって、
前記第1モータは、その回転軸が略鉛直方向を向くよう配置され、前記第1アームを介して前記肩甲骨部の屈曲・伸展の他動運動を再現するよう前記肩甲骨部ホルダの位置及び姿勢を変更し、
前記第2モータは、その回転軸が略前後方向を向くよう配置され、前記第2アームを介して前記肩甲骨部の挙上・引き下げの他動運動を再現するよう前記肩甲骨部ホルダの位置及び姿勢を変更する、肩部訓練装置。
【請求項7】
請求項1~請求項6のいずれかに記載の肩部訓練装置であって、
制御手段を備え、
前記制御手段は、前記使用者に前記肩甲骨部ホルダ及び前記上腕ホルダを装着した状態で教示者が教示した前記肩甲骨部及び前記肩関節の他動運動を前記肩甲骨部ホルダ及び前記上腕ホルダの動作として記憶し、その後、前記肩甲骨部駆動手段と前記肩関節駆動手段とを制御することで、当該他動運動を再現する、肩部訓練装置。
【請求項8】
請求項6に記載の肩部訓練装置であって、
前記肩関節駆動手段は、第3モータと、第4モータと、第3アームとを備え、
前記第3モータは、前記肩甲骨部ホルダに支持されるとともに、前記第3アームの基端側と接続され、当該第3アームを回動させるよう構成され、
前記第4モータは、前記第3アームの先端部に支持されるとともに、前記上腕ホルダの基端側と接続され、当該上腕ホルダを回動させるよう構成され、
前記第3モータは、前記第3アームを介して前記肩関節の外転・内転の他動運動を再現するよう前記上腕ホルダの位置及び姿勢を変更し、
前記第4モータは、前記上腕ホルダを介して前記肩関節の屈曲・伸展の他動運動を再現するよう前記上腕ホルダの位置及び姿勢を変更する、肩部訓練装置。
【請求項9】
請求項8に記載の肩部訓練装置であって、
第1~第4エンコーダと、制御手段とをさらに備え、
前記第1~第4エンコーダは、前記第1~第4モータの回転角度をそれぞれ検知するよう構成されており、
前記制御手段は、前記第1~第4エンコーダの回転角度を取得することで、前記使用者に前記肩甲骨部ホルダ及び前記上腕ホルダを装着させた状態で教示者が教示した前記肩甲骨部及び前記肩関節の他動運動を記憶し、その後、前記第1~第4モータを駆動することで、当該他動運動を再現する、肩部訓練装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、肩甲骨及び肩関節の他動運動を行う肩部訓練装置に関する。
続きを表示(約 4,300 文字)
【背景技術】
【0002】
従来、肩関節周囲炎、いわゆる「五十肩」を治療するための運動療法として、他動関節可動域訓練(CPM)が行われており、理学療法士にかかる負担を低減するため、訓練動作を繰り返し再現する肩部訓練装置が用いられている(例えば、非特許文献1や非特許文献2参照)。
【先行技術文献】
【特許文献】
【0003】
Celik, Derya. "Comparison of the outcomes of two different exercise programs on frozen shoulder." Acta orthopaedica et traumatologica turcica 44.4 (2010) 285-292.
Thera Tech Equipment, Inc. "Centura-Anatomical-Shoulder-Kinetec-USA." [Retrieved on 2022-06-17]. Retrieved from the Internet: <URL: http://theratechequip.com/wp-content/uploads/2014/06/Centura-Anatomical-Shoulder-Kinetec-USA.pdf>.
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、従来の肩部訓練装置は、肩関節の運動のみが考慮されており、肩甲骨部における訓練動作は不十分であった。また、従来の肩部訓練装置は、使用者の上腕を保持して動作することにより肩関節の他動運動を行うため、理学療法士が訓練動作を行う場合と異なり肩甲骨部が非固定状態のままであり、理学療法士による他動動作を忠実に再現することができていなかった。
【0005】
本発明はこのような事情に鑑みてなされたものであり、肩甲骨部及び肩関節の両方の動きを取り入れた肩部訓練装置を提供するものである。
【課題を解決するための手段】
【0006】
本発明によれば、以下の発明が提供される。
[1]肩甲骨部及び肩関節の他動運動を行う肩部訓練装置であって、肩甲骨部ホルダと、上腕ホルダと、肩甲骨部駆動手段と、肩関節駆動手段とを備え、前記肩甲骨部ホルダは、使用者の肩甲骨に沿って装着可能とされ、前記上腕ホルダは、前記使用者の上腕に沿って装着可能とされ、前記肩甲骨部駆動手段は、前記肩甲骨部ホルダを動作させることで前記肩甲骨部の他動運動を再現し、前記肩関節駆動手段は、前記上腕ホルダを動作させることで前記肩関節の他動運動を再現する、肩部訓練装置。
[2][1]に記載の肩部訓練装置であって、前記肩甲骨部駆動手段は、前記肩甲骨部ホルダの位置及び姿勢を変更することにより、前記肩甲骨部の屈曲・伸展、挙上・引き下げの四つの他動運動を再現する、肩部訓練装置。
[3][2]に記載の肩部訓練装置であって、前記肩甲骨部駆動手段は、パラレルリンク機構を備え、当該パラレルリンク機構により、前記肩甲骨部ホルダの位置及び姿勢を変更する、肩部訓練装置。
[4][3]に記載の肩部訓練装置であって、前記パラレルリンク機構は、第1モータと、第2モータと、第1アームと、第2アームとを備え、前記第1モータは、前記第1アームの基端側と接続されるとともに、当該第1アームを回動させるよう構成され、前記第2モータは、前記第2アームの基端側と接続されるとともに、当該第2アームを回動させるよう構成され、前記第1アーム及び前記第2アームは、それぞれ一対のリンクがボールジョイントによって連結されて構成されるとともに、その先端部が前記肩甲骨部ホルダに接続されており、前記パラレルリンク機構は、前記第1モータ及び前記第2モータを駆動することにより、前記肩甲骨部ホルダの位置及び姿勢を変更する、肩部訓練装置。
[5][4]に記載の肩部訓練装置であって、前記第1モータと前記第2モータは、それぞれの回転軸が略垂直になるよう配置される、肩部訓練装置。
[6][5]に記載の肩部訓練装置であって、前記第1モータは、その回転軸が略鉛直方向を向くよう配置され、前記第1アームを介して前記肩甲骨部の屈曲・伸展の他動運動を再現するよう前記肩甲骨部ホルダの位置及び姿勢を変更し、前記第2モータは、その回転軸が略前後方向を向くよう配置され、前記第2アームを介して前記肩甲骨部の挙上・引き下げの他動運動を再現するよう前記肩甲骨部ホルダの位置及び姿勢を変更する、肩部訓練装置。
[7][1]~[6]のいずれかに記載の肩部訓練装置であって、制御手段を備え、前記制御手段は、前記使用者に前記肩甲骨部ホルダ及び前記上腕ホルダを装着した状態で教示者が教示した前記肩甲骨部及び前記肩関節の他動運動を前記肩甲骨部ホルダ及び前記上腕ホルダの動作として記憶し、その後、前記肩甲骨部駆動手段と前記肩関節駆動手段とを制御することで、当該他動運動を再現する、肩部訓練装置。
[8][6]に記載の肩部訓練装置であって、前記肩関節駆動手段は、第3モータと、第4モータと、第3アームとを備え、前記第3モータは、前記肩甲骨部ホルダに支持されるとともに、前記第3アームの基端側と接続され、当該第3アームを回動させるよう構成され、前記第4モータは、前記第3アームの先端部に支持されるとともに、前記上腕ホルダの基端側と接続され、当該上腕ホルダを回動させるよう構成され、前記第3モータは、前記第3アームを介して前記肩関節の外転・内転の他動運動を再現するよう前記上腕ホルダの位置及び姿勢を変更し、前記第4モータは、前記上腕ホルダを介して前記肩関節の屈曲・伸展の他動運動を再現するよう前記上腕ホルダの位置及び姿勢を変更する、肩部訓練装置。
[9][8]に記載の肩部訓練装置であって、第1~第4エンコーダと、制御手段とをさらに備え、前記第1~第4エンコーダは、前記第1~第4モータの回転角度をそれぞれ検知するよう構成されており、前記制御手段は、前記第1~第4エンコーダの回転角度を取得することで、前記使用者に前記肩甲骨部ホルダ及び前記上腕ホルダを装着させた状態で教示者が教示した前記肩甲骨部及び前記肩関節の他動運動を記憶し、その後、前記第1~第4モータを駆動することで、当該他動運動を再現する、肩部訓練装置。
【0007】
本発明によれば、肩甲骨部駆動手段と肩関節駆動手段とにより肩甲骨部ホルダと上腕ホルダとを独立して動作させることができ、肩甲骨と肩関節を独立して他動運動させることが可能となっている。
【図面の簡単な説明】
【0008】
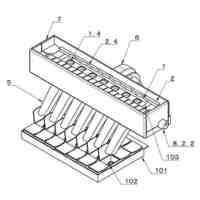
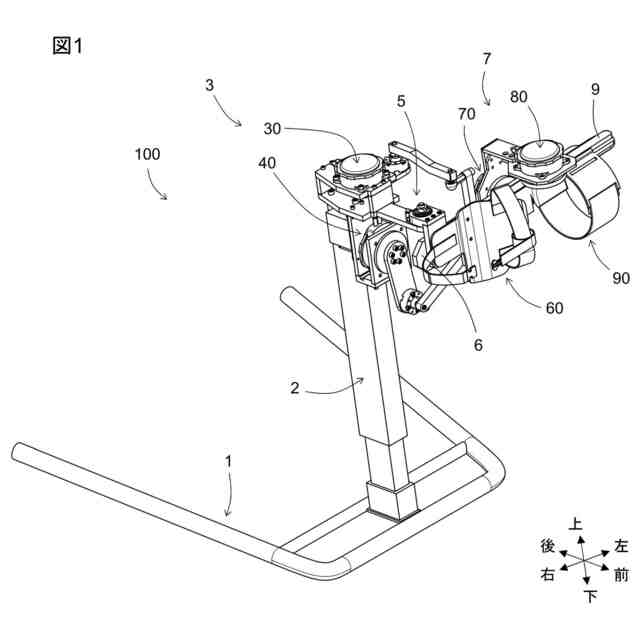
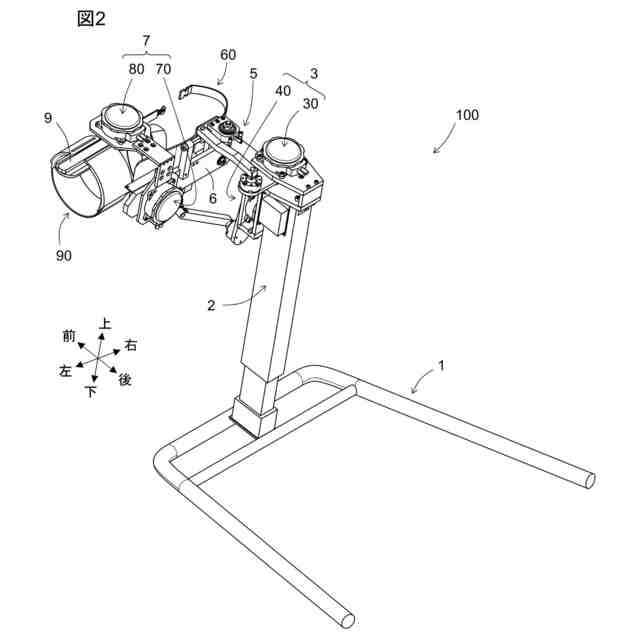
本発明の一実施形態に係る肩部訓練装置100の全体構成を示す斜視図である。
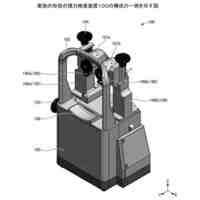
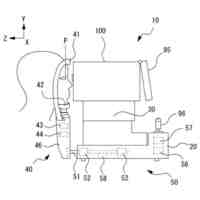
図1の肩部訓練装置100の背面斜視図である。
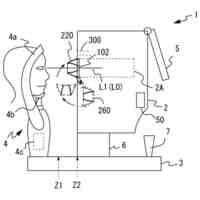
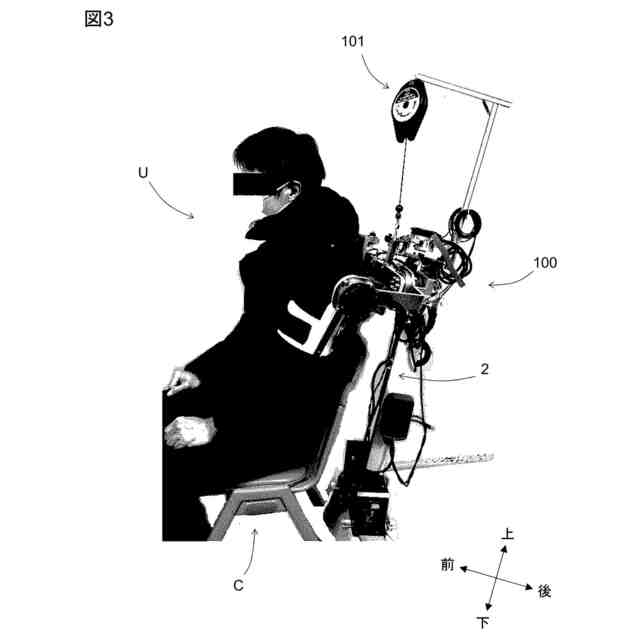
図1の肩部訓練装置100を椅子Cに着座した使用者Uに装着した様子を示す図である。
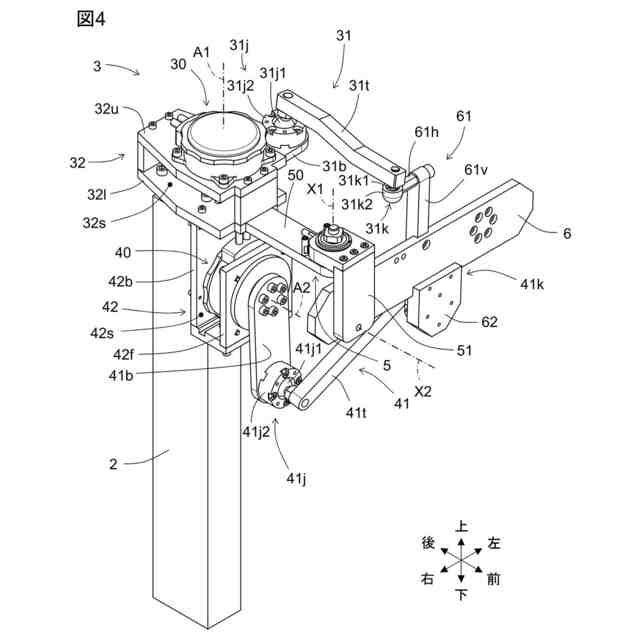
図1の状態から、肩甲骨部ホルダ60、肩関節駆動手段7、上腕プレート9及び上腕ホルダ90を取り外した様子を示す拡大斜視図である。
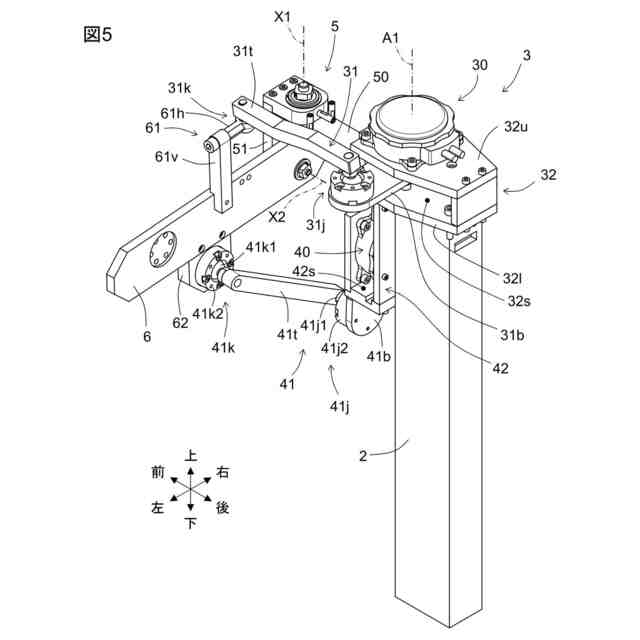
図4の状態の拡大背面斜視図である。
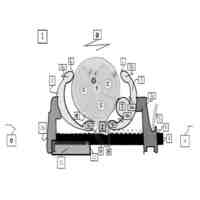
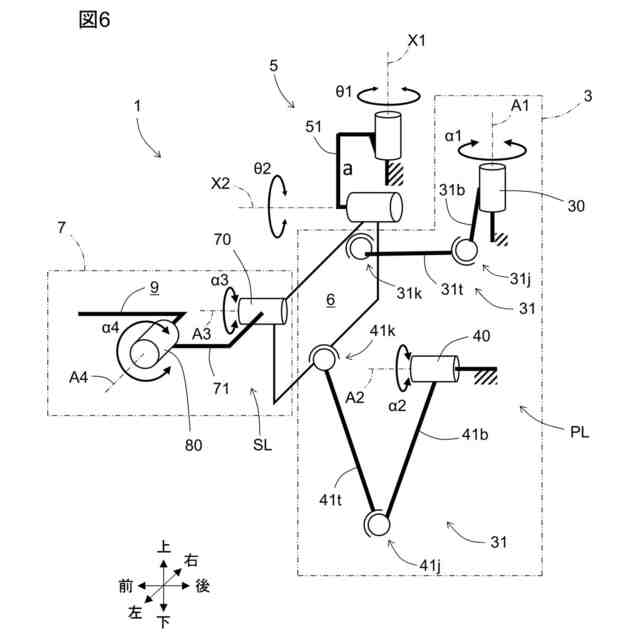
図1の肩部訓練装置100の機構図である。
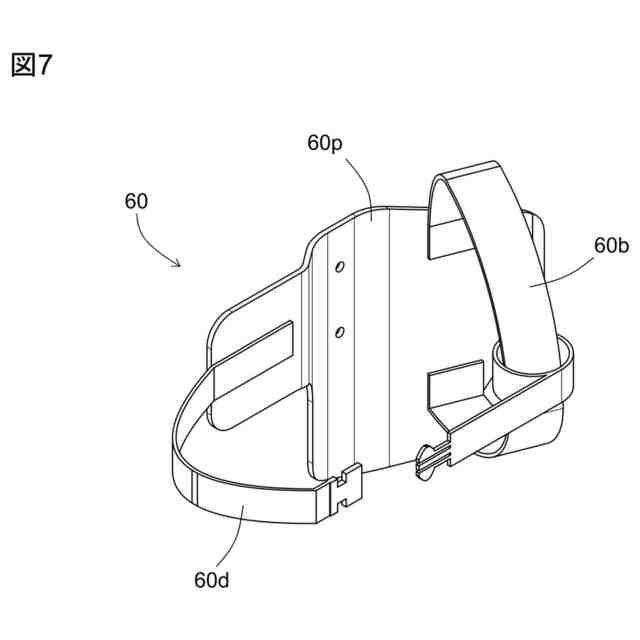
図1の肩部訓練装置100の肩甲骨部ホルダ60の拡大斜視図である。
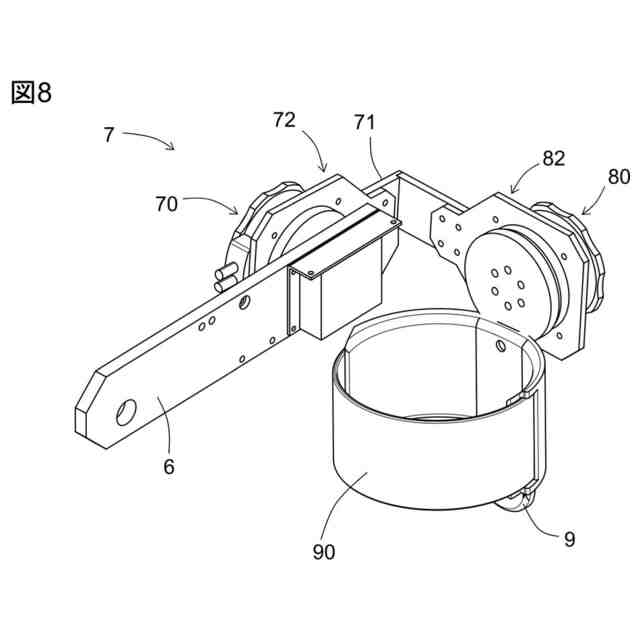
図1の肩部訓練装置100の肩甲骨部プレート6、肩関節駆動手段7、上腕プレート9及び上腕ホルダ90を示す斜視図である。
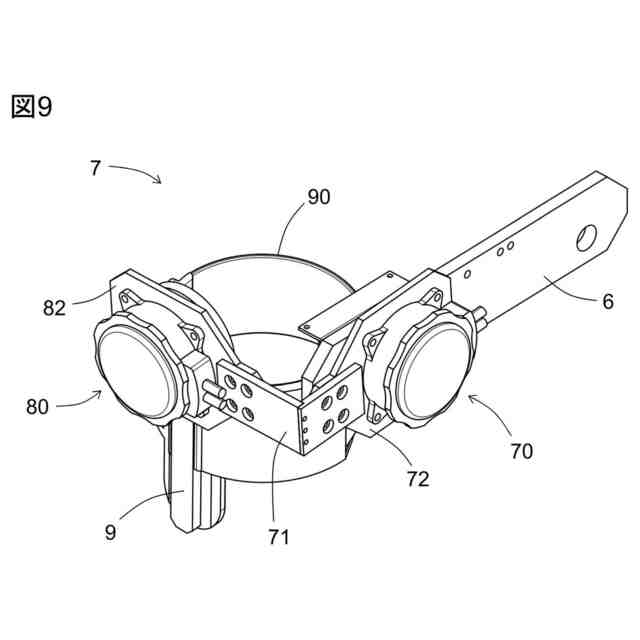
図1の肩部訓練装置100の肩甲骨部プレート6、肩関節駆動手段7、上腕プレート9及び上腕ホルダ90を示す背面斜視図である。
図1の肩部訓練装置100の機能ブロック図である。
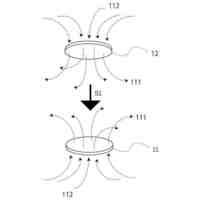
図11Aは、肩甲骨部の屈曲及び伸展動作を示す説明図であり、図11Bは、肩甲骨部の挙上及び引き下げ動作を示す説明図である。
図12Aは、肩関節の水平屈曲及び水平伸展動作を示す説明図であり、図12Bは、肩関節の屈曲及び伸展動作を示す説明図であり、図12Cは、肩関節の外転及び内転動作を示す説明図である。
図13Aは、図1の肩部訓練装置100が肩甲骨部の屈曲の他動動作を行う際の肩甲骨部駆動手段3の状態を示す背面斜視図であり、図13Bは、同肩部訓練装置100が肩甲骨部の伸展の他動動作を行う際の肩甲骨部駆動手段3の状態を示す背面斜視図である。
図14Aは、図13Aの状態を示す平面図であり、図14Bは、図13Bの状態を示す平面図である。
図15Aは、図1の肩部訓練装置100が肩甲骨部の挙上の他動動作を行う際の肩甲骨部駆動手段3の様子を示す背面斜視図であり、図15Bは、同肩部訓練装置100が肩甲骨部の引き下げの他動動作を行う際の肩甲骨部駆動手段3の様子を示す背面斜視図である。
図16Aは、図15Aの状態を示す正面図であり、図16Bは、図15Bの状態を示す正面図である。
図1の肩部訓練装置100のティーチングモードM1の動作を示すフローチャートである。
図1の肩部訓練装置100の再現モードM2の動作を示すフローチャートである。
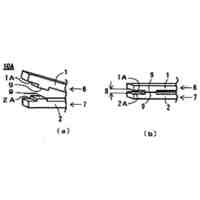
図19Aは、本発明の変形例に係る肩部訓練装置100を左肩に用いるモードを示す斜視図であり、図19Bは、同肩部訓練装置100を右肩に用いるモードを示す斜視図である。
図20Aは、図19Aの状態を示す側面図であり、図20Bは、図19Bの状態を示す側面図である。
【発明を実施するための形態】
【0009】
以下、本発明の実施形態について説明する。以下に示す実施形態中で示した各種特徴事項は、互いに組み合わせ可能である。また、各特徴について独立して発明が成立する。
【0010】
1.肩部訓練装置100の全体構成
本発明の一実施形態に係る肩部訓練装置100は、図1及び図2に示すように、支持脚1と、支柱2と、肩甲骨部駆動手段3と、支持アーム5と、肩甲骨部プレート6と、肩関節駆動手段7と、上腕プレート9と、制御手段10(図10参照)とを備える。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
国立大学法人山梨大学
血液浄化装置
29日前
国立大学法人山梨大学
キメラタンパク質
1か月前
国立大学法人山梨大学
選果装置及び情報処理方法
20日前
国立大学法人山梨大学
解析方法及び解析システム
27日前
株式会社QDレーザ
視力検査装置
1か月前
東海カーボン株式会社
メソ孔が形成されているフェノール樹脂及びメソ孔が形成されている炭素化物
27日前
東海カーボン株式会社
メソ孔が形成されているフェノール樹脂の製造方法及びメソ孔が形成されている炭素化物の製造方法
27日前
東海カーボン株式会社
メソ孔が形成されている三次元網目構造を有するフェノール樹脂の製造方法及びメソ孔が形成されている三次元網目構造を有する炭素化物の製造方法
27日前
個人
歯の掃除具
6日前
個人
男性用下着
4か月前
個人
穿刺補助具
4か月前
個人
錠剤撒き器
2か月前
個人
乗馬テラピー
21日前
個人
身体牽引装置
16日前
個人
発熱器具
6日前
個人
磁器治療器
20日前
個人
挟圧手工爪矯正具
2か月前
個人
鼻腔拡張具
2か月前
株式会社コロナ
脱臭機
2か月前
個人
動体視力強化装置
27日前
個人
排便漏れ予防装具
4か月前
株式会社ナカニシ
生検針
20日前
個人
マウスピース
4か月前
個人
口腔ケア用歯ブラシ
2か月前
東レ株式会社
下肢着用具
20日前
個人
血管硬化度算出方法
1か月前
株式会社ニデック
眼科装置
1か月前
株式会社ニデック
眼科装置
2か月前
株式会社ニデック
眼科装置
1か月前
株式会社ニデック
眼科装置
2か月前
株式会社ニデック
眼科装置
1か月前
株式会社ダリヤ
皮膚洗浄剤
2か月前
株式会社ファンケル
化粧料
15日前
株式会社ファンケル
化粧料
1か月前
大正製薬株式会社
内服液剤
20日前
個人
唾液分泌促進具
29日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ