TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024151594
公報種別
公開特許公報(A)
公開日
2024-10-25
出願番号
2023065058
出願日
2023-04-12
発明の名称
選果装置及び情報処理方法
出願人
国立大学法人山梨大学
代理人
SK弁理士法人
,
個人
,
個人
主分類
G01N
21/85 20060101AFI20241018BHJP(測定;試験)
要約
【課題】果物をより精度よく選別することができる、選果装置及び情報処理方法を提供することを目的としている。
【解決手段】情報処理部を備えた選果装置であって、前記情報処理部は、画像取得部と、果物情報取得部とを有し、前記画像取得部は、果物画像を取得するように構成され、前記果物情報取得部は、領域取得部と、判定部とを有し、前記領域取得部は、前記果物画像に基づいて、果物の果柄領域を取得するように構成され、前記判定部は、前記果柄領域に基づいて、前記果物の果柄の有無を判定する、選果装置が提供される。
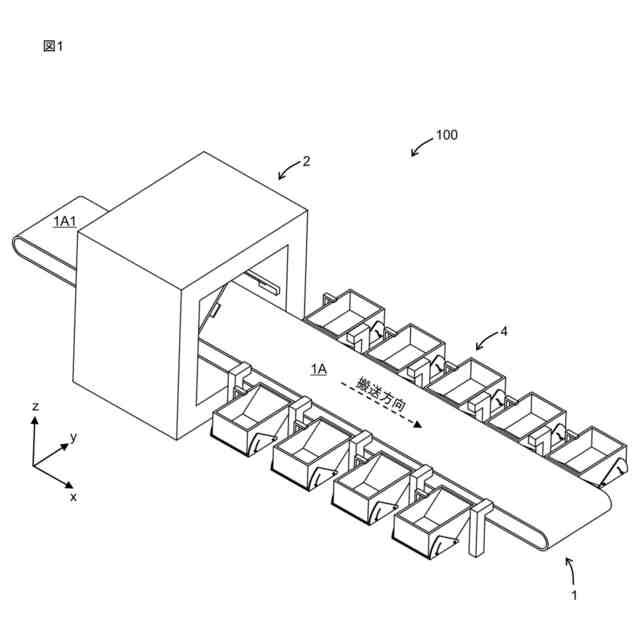
【選択図】図1
特許請求の範囲
【請求項1】
情報処理部を備えた選果装置であって、
前記情報処理部は、画像取得部と、果物情報取得部とを有し、
前記画像取得部は、果物画像を取得するように構成され、
前記果物情報取得部は、領域取得部と、判定部とを有し、
前記領域取得部は、前記果物画像に基づいて、果物の果柄領域を取得するように構成され、
前記判定部は、前記果柄領域に基づいて、前記果物の果柄の有無を判定する、選果装置。
続きを表示(約 1,700 文字)
【請求項2】
請求項1に記載の選果装置であって、
前記領域取得部は、前記果物画像に対してRGB色空間からHLS色空間へ変換することで変換果物画像を取得し、且つ、HLS色空間において前記変換果物画像の画素のうち、第1色相範囲に含まれ且つ第1明度範囲に含まれ且つ第1彩度範囲に含まれる画素を前記果柄領域としている、選果装置。
【請求項3】
請求項1に記載の選果装置であって、
前記判定部は、前記果柄領域の面積に基づいて、前記果物の果柄の有無を判定する、選果装置。
【請求項4】
請求項1に記載の選果装置であって、
前記領域取得部は、前記果物画像に基づいて、前記果物の果実領域を取得するように構成され、
前記果物情報取得部は、赤道径取得部を更に有し、
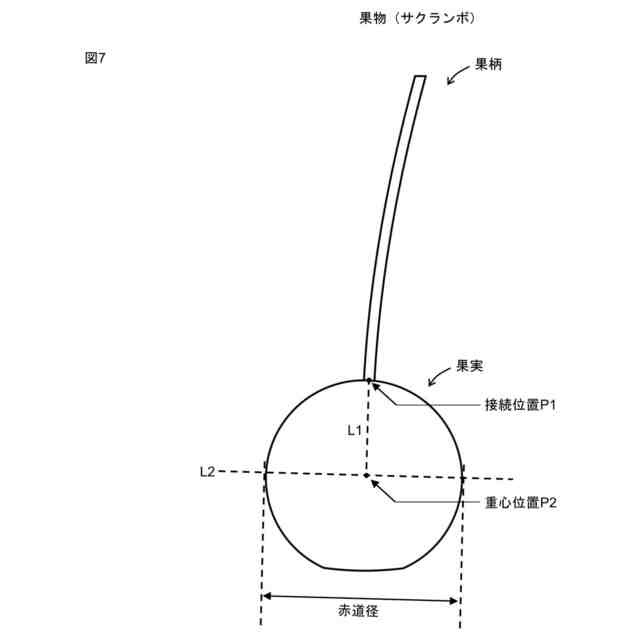
前記赤道径取得部は、前記果柄領域及び前記果実領域に基づいて接続位置を取得すると共に前記果実領域に基づいて重心位置を取得し、且つ、前記接続位置及び前記重心位置に基づいて前記果物の赤道径を取得し、
前記接続位置は、前記果柄領域と前記果実領域とが接続する画素の位置に対応し、
前記重心位置は、前記果実領域の重心となる画素の位置に対応している、選果装置。
【請求項5】
請求項4に記載の選果装置であって、
前記果物画像は、前記果物を上部から撮影した上部果物画像と、前記果物を横から撮影した側部果物画像とを含み、
前記赤道径取得部は、前記上部果物画像の前記果物画像の前記果柄領域及び前記果実領域に基づいて、前記接続位置と前記重心位置との間の距離を取得し、
前記距離が予め定められた距離以上である場合には、前記赤道径取得部は、前記上部果物画像の前記果物画像に基づいて、前記果物の前記赤道径を取得し、
前記距離が予め定められた距離より小さい場合には、前記赤道径取得部は、前記側部果物画像で取得した前記果物画像に基づいて、前記果物の前記赤道径を取得する、選果装置。
【請求項6】
請求項5に記載の選果装置であって、
前記赤道径の方向は、前記接続位置と前記重心位置とを結ぶ直線に対して直交している、選果装置。
【請求項7】
請求項1に記載の選果装置であって、
前記領域取得部は、前記果物画像に基づいて、前記果物の果実領域を取得するように構成され、
前記果物情報取得部は、着色率取得部を更に有し、
前記着色率取得部は、前記果実領域内に含まれる着色画素を取得し、且つ、前記果実領域の面積に対する前記着色画素の数の割合に基づいて着色率を取得し、
前記着色画素は、HLS色空間において第2色相範囲に含まれ且つ第2彩度範囲に含まれ且つ第2明度範囲に含まれる画素である、選果装置。
【請求項8】
請求項1に記載の選果装置であって、
撮影機構と、照明機構を更に備え、
前記撮影機構は、カメラと光拡散部材とを有し、
前記照明機構は、光源を有し、
前記カメラは、前記光拡散部材内において前記果物に臨むように設けられおり、
前記光拡散部材は、前記果物を取り囲むように設けられ、
前記光源は、前記光拡散部材内に設けられ、且つ、前記光源の光軸が前記光拡散部材に向けられている、選果装置。
【請求項9】
請求項1に記載の選果装置であって、
選別機構を更に備え、
前記選別機構は、複数の格納箱と、エアー吹出部とを有し、
前記エアー吹出部は、エアーを吹き出すことで、前記果物を各前記格納箱に移動させる、選果装置。
【請求項10】
請求項9に記載の選果装置であって、
前記選別機構は、格納量検出センサと、報知部とを更に有し、
前記格納量検出センサは、前記格納箱内の前記果物の量を検出可能に構成され、
前記報知部は、前記果物の量に応じて、その旨を報知するように構成されている、選果装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、選果装置及び情報処理方法に関する。
続きを表示(約 4,200 文字)
【背景技術】
【0002】
特許文献1には、青果物をコンベアで搬送しているときにおいて、カメラで青果物を撮像することで、青果物の外観(キズ等)を検査可能に構成された選別装置が開示されている。そして、特許文献1では、カメラで青果物を撮像して取得した画像データを、予め記憶されている検査項目に関する画像データと比較する外観検査が開示されている。
【先行技術文献】
【非特許文献】
【0003】
特開2015-3284号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
青果物の中には、サクランボやリンゴといったように果柄を有する果物がある。これらの果柄を有する果物は、例えば贈り物として用いられる等から理解されるように、外観に対する要求基準が野菜等よりも高いと考えることができ、より精度の高い選別が必要である。特許文献1では、画像データ同士を比較することで検査がなされるが、比較している部位が同様であるかが不明であり、適切な選別ができなくなる可能性が高くなる、という課題がある。
【0005】
本発明はこのような事情に鑑みてなされたものであり、果物をより精度よく選別することができる、選果装置及び情報処理方法を提供することを目的としている。
【課題を解決するための手段】
【0006】
本発明によれば、[1]情報処理部を備えた選果装置であって、前記情報処理部は、画像取得部と、果物情報取得部とを有し、前記画像取得部は、果物画像を取得するように構成され、前記果物情報取得部は、領域取得部と、判定部とを有し、前記領域取得部は、前記果物画像に基づいて、果物の果柄領域を取得するように構成され、前記判定部は、前記果柄領域に基づいて、前記果物の果柄の有無を判定する、選果装置が提供される。
【0007】
本発明によれば、領域取得部が果物画像に基づいて果物の果柄領域を取得するため、検査対象の部位を果柄として特定することが可能であり、そして、判定部が、検査対象の部位として特定された果柄領域に基づいて果物の果柄の有無を判定するため、果物(果物の果柄の有無)をより精度よく選別することができる。
【0008】
以下、本発明の種々の実施形態を例示する。以下に示す実施形態は互いに組み合わせ可能である。
[2][1]に記載の選果装置であって、前記領域取得部は、前記果物画像に対してRGB色空間からHLS色空間へ変換することで変換果物画像を取得し、且つ、HLS色空間において前記変換果物画像の画素のうち、第1色相範囲に含まれ且つ第1明度範囲に含まれ且つ第1彩度範囲に含まれる画素を前記果柄領域としている、選果装置。
[3][1]又は[2]に記載の選果装置であって、前記判定部は、前記果柄領域の面積に基づいて、前記果物の果柄の有無を判定する、選果装置。
[4][1]~[3]の何れか1つに記載の選果装置であって、前記領域取得部は、前記果物画像に基づいて、前記果物の果実領域を取得するように構成され、前記果物情報取得部は、赤道径取得部を更に有し、前記赤道径取得部は、前記果柄領域及び前記果実領域に基づいて接続位置を取得すると共に前記果実領域に基づいて重心位置を取得し、且つ、前記接続位置及び前記重心位置に基づいて前記果物の赤道径を取得し、前記接続位置は、前記果柄領域と前記果実領域とが接続する画素の位置に対応し、前記重心位置は、前記果実領域の重心となる画素の位置に対応している、選果装置。
[5][4]に記載の選果装置であって、前記果物画像は、前記果物を上部から撮影した上部果物画像と、前記果物を横から撮影した側部果物画像とを含み、前記赤道径取得部は、前記上部果物画像の前記果物画像の前記果柄領域及び前記果実領域に基づいて、前記接続位置と前記重心位置との間の距離を取得し、前記距離が予め定められた距離以上である場合には、前記赤道径取得部は、前記上部果物画像の前記果物画像に基づいて、前記果物の前記赤道径を取得し、前記距離が予め定められた距離より小さい場合には、前記赤道径取得部は、前記側部果物画像で取得した前記果物画像に基づいて、前記果物の前記赤道径を取得する、選果装置。
[6][5]に記載の選果装置であって、前記赤道径の方向は、前記接続位置と前記重心位置とを結ぶ直線に対して直交している、選果装置。
[7][1]~[6]の何れか1つに記載の選果装置であって、前記領域取得部は、前記果物画像に基づいて、前記果物の果実領域を取得するように構成され、前記果物情報取得部は、着色率取得部を更に有し、前記着色率取得部は、前記果実領域内に含まれる着色画素を取得し、且つ、前記果実領域の面積に対する前記着色画素の数の割合に基づいて着色率を取得し、前記着色画素は、HLS色空間において第2色相範囲に含まれ且つ第2彩度範囲に含まれ且つ第2明度範囲に含まれる画素である、選果装置。
[8][1]~[7]の何れか1つに記載の選果装置であって、撮影機構と、照明機構を更に備え、前記撮影機構は、カメラと光拡散部材とを有し、前記照明機構は、光源を有し、前記カメラは、前記光拡散部材内において前記果物に臨むように設けられおり、前記光拡散部材は、前記果物を取り囲むように設けられ、前記光源は、前記光拡散部材内に設けられ、且つ、前記光源の光軸が前記光拡散部材に向けられている、選果装置。
[9][1]~[8]の何れか1つに記載の選果装置であって、選別機構を更に備え、前記選別機構は、複数の格納箱と、エアー吹出部とを有し、前記エアー吹出部は、エアーを吹き出すことで、前記果物を各前記格納箱に移動させる、選果装置。
[10][9]に記載の選果装置であって、前記選別機構は、格納量検出センサと、報知部とを更に有し、前記格納量検出センサは、前記格納箱内の前記果物の量を検出可能に構成され、前記報知部は、前記果物の量に応じて、その旨を報知するように構成されている、選果装置。
[11]情報処理部を備えた選果装置であって、前記情報処理部は、画像取得部と、果物情報取得部とを有し、前記画像取得部は、果物画像を取得するように構成され、前記果物情報取得部は、領域取得部と、赤道径取得部とを有し、前記領域取得部は、前記果物画像に基づいて、果物の果柄領域及び前記果物の果実領域を取得するように構成され、前記赤道径取得部は、前記果柄領域及び前記果実領域に基づいて接続位置を取得すると共に前記果実領域に基づいて重心位置を取得し、且つ、前記接続位置及び前記重心位置に基づいて前記果物の赤道径を取得し、前記接続位置は、前記果柄領域と前記果実領域とが接続する画素の位置に対応し、前記重心位置は、前記果実領域の重心となる画素の位置に対応している、選果装置。
[12]コンピュータが実行する、果物を選果するための情報処理方法であって、果物画像取得ステップと、領域取得ステップと、判定ステップとを備え、前記果物画像取得ステップでは、果物画像を取得し、前記領域取得ステップでは、前記果物画像に基づいて、果物の果柄領域を取得し、前記判定ステップでは、前記果柄領域に基づいて、前記果物の果柄の有無を判定する、情報処理方法。
【図面の簡単な説明】
【0009】
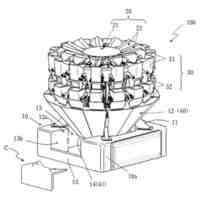
図1は、第1実施形態に係る選果装置100の全体構成を示す斜視図である。
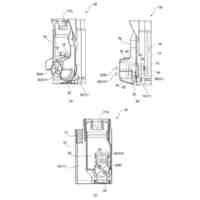
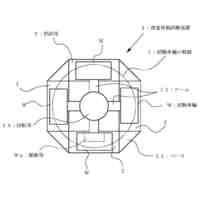
図2は、図1に示す撮影機構2に形成された3つの開口部Opを通る仮想平面で、撮影機構2と照明機構3を切断した状態を示した斜視図である。なお、図2において、矢印Laは、光源3Cの光軸の方向を模式的に示している。
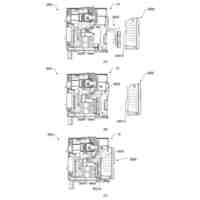
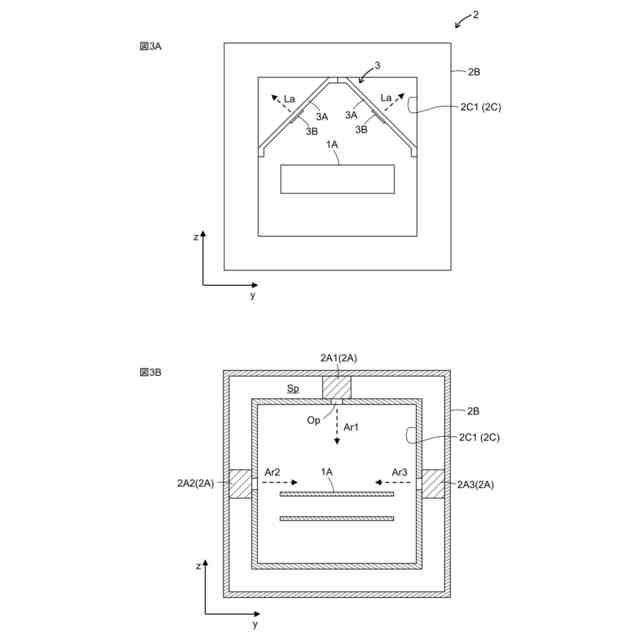
図3Aは、図1に示す選果装置100のうち選別機構4を取り除いた状態を示す正面図である。図3Bは、上述の図2に係る仮想平面を通るベルトコンベア1A及び撮影機構2の端面図である。なお、図3Aにおいて、矢印Laは、光源3Cの光軸の方向を模式的に示している。また、図3Bでは、図3Aに示す照明機構3(支持部3A及び基板部3B)については図示省略している。
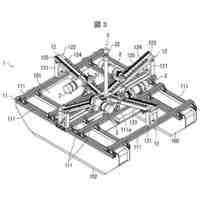
図4は、図1に示す選別機構4の詳細構成を説明するための斜視図である。
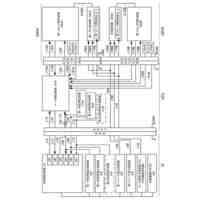
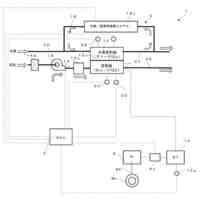
図5は、第1実施形態に係る選果装置100の機能ブロック図である。
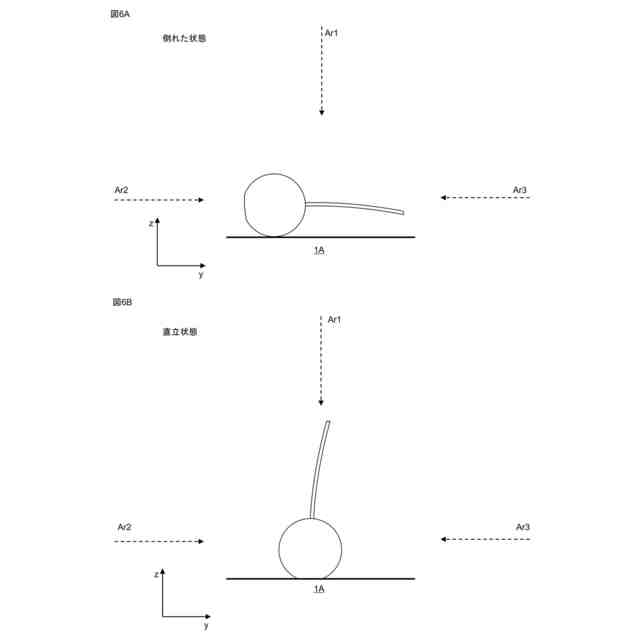
図6Aは、ベルトコンベア1Aで倒れた状態の果物(サクランボ)を撮像する様子を模式的に示している。図6Bは、ベルトコンベア1Aで直立状態の果物(サクランボ)を撮像する様子を模式的に示している。図6A及び図6Bにおいて、矢印Ar1は図2に示す上部カメラ2A1の撮像方向を模式的に表しており、矢印Ar2は図2に示す右側部カメラ2A2の撮像方向を模式的に表しており、矢印Ar3は図2に示す左側部カメラ2A3の撮像方向を模式的に表している。
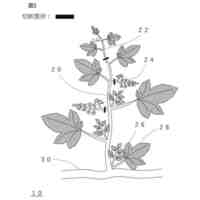
図7は、果物(サクランボ)の各部位等を説明するための模式図である。
図8は、果物(サクランボ)が撮像された果物画像d1の各画素を模式的に示した説明図である。
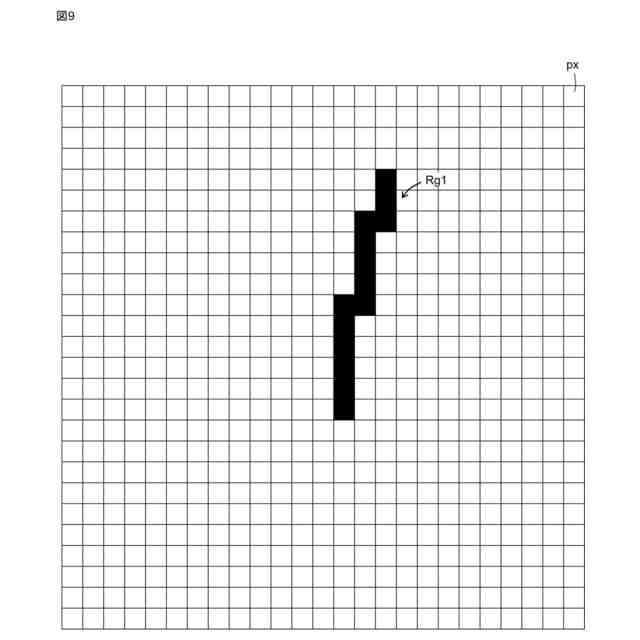
図9は、図8に示す果物画像d1のうちの果柄領域Rg1が二値化処理されて黒で示された様子を模式的に示している。
図10は、図8に示す果物画像d1のうちの果実領域Rg2が二値化処理されて黒で示された様子を模式的に示している。
図11は、カメラ2Aが倒れた状態の果物を撮像する場合において、領域取得部5B1が取得する4つの領域(上部カメラ2A1に基づく果柄領域Rg1及び果実領域Rg2と、右側部カメラ2A2に基づく果実領域Rg2と、左側部カメラ2A3に基づく果実領域Rg2)により、赤道径や着色率が取得される様子を模式的に示した説明図である。
【発明を実施するための形態】
【0010】
以下、図面を用いて本発明の実施形態について説明する。以下に示す実施形態中で示した各種特徴事項は、互いに組み合わせ可能である。また、各特徴事項について独立して発明が成立する。
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPatで参照する
関連特許
国立大学法人山梨大学
NMR検出器
1か月前
国立大学法人山梨大学
ブドウの栽培方法
25日前
国立大学法人山梨大学
受精胚の選別方法及び装置
1か月前
国立大学法人山梨大学
ワイヤレス電力伝送システム
1か月前
国立大学法人山梨大学
蛍光標識金ナノロッドとその製造方法
28日前
新東工業株式会社
パラレルリンク機構、運搬装置および作業用ロボット
1か月前
日本ケミコン株式会社
導電性高分子分散液の製造方法、及び固体電解コンデンサの製造方法
1か月前
三菱自動車工業株式会社
燃料電池セルの性能判定方法、およびこの性能判定方法を備える燃料電池車両
3か月前
個人
粒子分析装置
11日前
株式会社イシダ
計量装置
5日前
個人
アクセサリー型テスター
12日前
エイブリック株式会社
電流検出回路
25日前
栄進化学株式会社
浸透探傷用濃縮液
18日前
株式会社テイエルブイ
振動検出装置
11日前
株式会社ミツトヨ
画像測定機
13日前
東レ株式会社
シート状物の検査方法
26日前
株式会社チノー
放射光測温装置
25日前
ダイハツ工業株式会社
試料セル
11日前
トヨタ自動車株式会社
検査装置
5日前
株式会社 キョーワ
食品搬送装置
25日前
日本特殊陶業株式会社
ガスセンサ
25日前
トヨタ自動車株式会社
電気自動車
12日前
大和製衡株式会社
計量装置
18日前
日本特殊陶業株式会社
ガスセンサ
25日前
理研計器株式会社
ガス検出器
13日前
株式会社熊谷組
計測システム
18日前
理研計器株式会社
ガス検出器
13日前
大成建設株式会社
画像表示システム
21日前
理研計器株式会社
ガス検出器
13日前
日本碍子株式会社
ガスセンサ
25日前
理研計器株式会社
ガス検出器
13日前
理研計器株式会社
ガス検出器
13日前
富士電機株式会社
エンコーダ
26日前
東ソー株式会社
簡易型液体クロマトグラフ
7日前
株式会社ニコン
検出装置
11日前
リバークル株式会社
荷重移動試験装置
5日前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ