TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2023163605
公報種別
公開特許公報(A)
公開日
2023-11-10
出願番号
2022074615
出願日
2022-04-28
発明の名称
荷役システム
出願人
株式会社豊田自動織機
代理人
個人
,
個人
主分類
B66F
9/24 20060101AFI20231102BHJP(巻上装置;揚重装置;牽引装置)
要約
【課題】パレットの位置を検出すること。
【解決手段】荷役車両は、荷役装置と、外界センサと、を備える。外界センサは、3次元座標系の座標で物体の位置を検出する。制御装置は、物体の位置を表した点の集合である点群データから、パレットの位置、及びパレットの個数を検出する。制御装置は、荷取りするパレットを決定する。
【選択図】図4
特許請求の範囲
【請求項1】
3次元座標系の座標で物体の位置を検出する外界センサ、及び荷役装置を備える荷役車両と、
制御装置と、を備える荷役システムであって、
前記制御装置は、
前記物体の位置を表した点の集合である点群データから、パレットの位置を検出し、
荷取りする前記パレットを決定する、荷役システム。
続きを表示(約 250 文字)
【請求項2】
前記制御装置は、
前記点群データから前記パレットの側面図を作成し、
前記側面図から画像認識によって前記パレットを抽出することによって前記パレットの位置、及び前記パレットの個数を検出する、請求項1に記載の荷役システム。
【請求項3】
前記制御装置は、
前記側面図から画像認識によって前記パレットを積載した搬送車両の運転席を抽出し、
前記運転席から最も離れた前記パレットを荷取りする前記パレットであると決定する、請求項2に記載の荷役システム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、荷役システムに関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
制御装置による制御によって自動で荷取りを行う荷役車両が特許文献1に開示されている。特許文献1に開示の荷役車両は、自己位置を推定しながら荷取り位置まで移動する。荷取り位置まで移動すると、荷役車両は荷取りを行う。
【先行技術文献】
【特許文献】
【0003】
特開2021-160885号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
荷役車両が荷取りを行う際には、荷役車両をパレットの近くまで移動させる必要がある。荷役車両をパレットの近くまで移動させるためには、パレットの位置を検出する必要がある。
【課題を解決するための手段】
【0005】
上記課題を解決する荷役システムは、3次元座標系の座標で物体の位置を検出する外界センサ、及び荷役装置を備える荷役車両と、制御装置と、を備える荷役システムであって、前記制御装置は、前記物体の位置を表した点の集合である点群データから、パレットの位置を検出し、荷取りする前記パレットを決定する。
【0006】
点群データの点は、物体の位置を表している。このため、制御装置は、点群データからパレットの位置を検出することができる。
上記荷役システムについて、前記制御装置は、前記点群データから前記パレットの側面図を作成し、前記側面図から画像認識によって前記パレットを抽出することによって前記パレットの位置、及び前記パレットの個数を検出してもよい。
【0007】
上記荷役システムについて、前記制御装置は、前記側面図から画像認識によって前記パレットを積載した搬送車両の運転席を抽出し、前記運転席から最も離れた前記パレットを荷取りする前記パレットであると決定してもよい。
【発明の効果】
【0008】
本発明によれば、パレットの位置を検出することができる。
【図面の簡単な説明】
【0009】
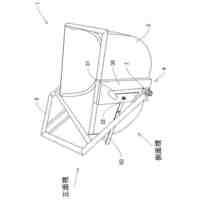
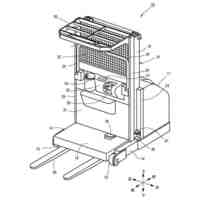
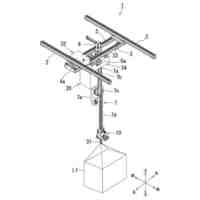
荷役車両が運用される区域の模式図である。
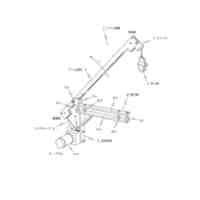
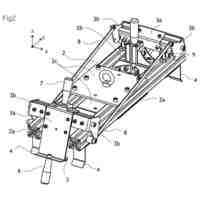
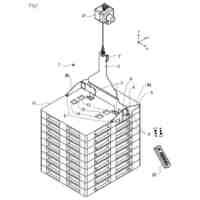
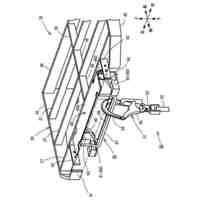
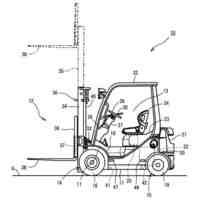
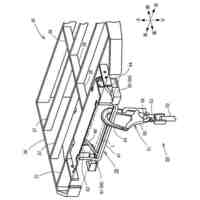
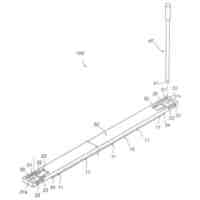
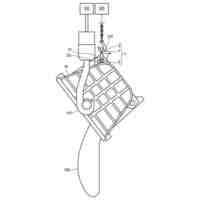
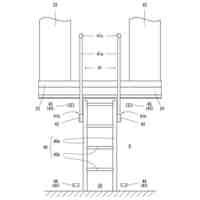
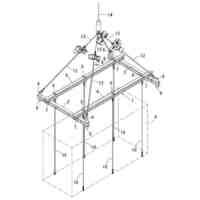
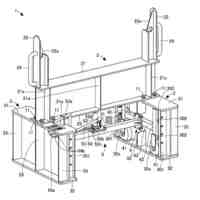
搬送車両、及び荷役車両の斜視図である。
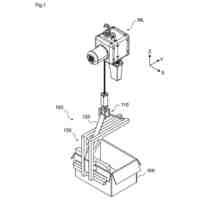
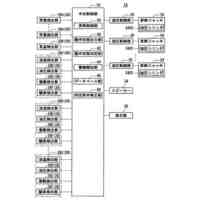
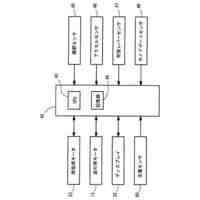
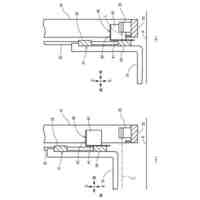
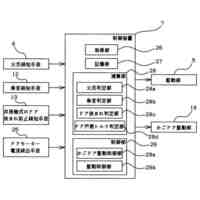
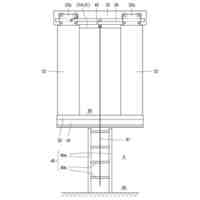
荷役車両の概略構成図である。
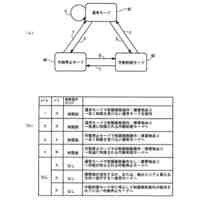
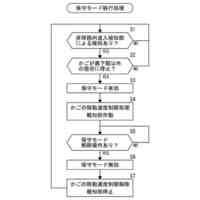
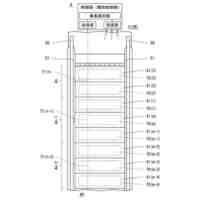
パレット検出制御を示すフローチャートである。
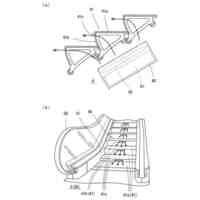
点群マップの模式図である。
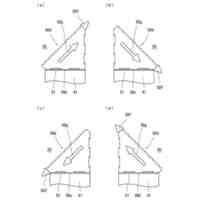
側面図の模式図である。
【発明を実施するための形態】
【0010】
以下、荷役システムの一実施形態について説明する。
図1に示すように、区域A1には、停車位置PS1が設定されている。停車位置PS1には、搬送車両10が停車する。停車位置PS1の面積は、停車位置PS1に停車する搬送車両10を平面視した場合の搬送車両10の面積よりも広い。停車位置PS1には、柱などの構造物が存在していない。区域A1は、例えば、工場、港湾、空港、商業施設、及び公共施設等の場所の全体、あるいは、一部である。区域A1では、荷役車両20が運用されている。荷役車両20は、荷積み及び荷取りを行う。荷積みは、パレットPA1に置かれた荷C1を搬送車両10に積載する作業である。荷取りは、搬送車両10に積載されたパレットPA1及び当該パレットPA1に置かれた荷C1を搬送車両10から取る作業である。以下の説明において、搬送車両10の前後左右上下とは、搬送車両10を基準とした場合の前後左右上下である。荷役車両20の左右上下とは、荷役車両20を基準とした場合の左右上下である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
トヨタ自動車株式会社
加工装置および電池部材の加工方法
2日前
個人
リフト装置
12か月前
ユニパルス株式会社
吊具
3か月前
ユニパルス株式会社
吊具
3か月前
個人
高低間移動補助装置
9か月前
個人
吊りバケット装置
5か月前
ユニパルス株式会社
吊具装置
9か月前
ユニパルス株式会社
吊具装置
9か月前
株式会社フジタ
昇降装置
8か月前
株式会社豊田自動織機
荷役車両
5か月前
株式会社豊田自動織機
荷役車両
24日前
株式会社豊田自動織機
産業車両
8か月前
株式会社豊田自動織機
産業車両
5か月前
株式会社豊田自動織機
荷役車両
5か月前
株式会社豊田自動織機
荷役車両
2か月前
株式会社豊田自動織機
荷役車両
1か月前
有限会社矢島製作所
ローダ
9か月前
株式会社アイセイ
搬送装置
6か月前
株式会社北川鉄工所
吊荷制御方法
2か月前
ユニパルス株式会社
物品昇降装置
8か月前
株式会社ノセ技研
バケット
5か月前
ユニパルス株式会社
荷役助力装置
8か月前
ユニパルス株式会社
荷役助力装置
19日前
ダイコー興産株式会社
引掛具
9か月前
大同特殊鋼株式会社
治具
1か月前
フジテック株式会社
エレベータ
4か月前
フジテック株式会社
エレベータ
9か月前
フジテック株式会社
エレベータ
3か月前
株式会社ニシキ
可変型吊り天秤
3日前
フジテック株式会社
エレベータ
2か月前
株式会社豊田自動織機
フォークリフト
7か月前
大和ハウス工業株式会社
可動架台
7か月前
フジテック株式会社
乗客コンベア
7か月前
フジテック株式会社
乗客コンベア
9か月前
フジテック株式会社
乗客コンベア
8か月前
フジテック株式会社
乗客コンベア
11か月前
続きを見る
他の特許を見る







 特許ウォッチ
特許ウォッチ