TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2023160580
公報種別
公開特許公報(A)
公開日
2023-11-02
出願番号
2022071023
出願日
2022-04-22
発明の名称
計測装置、計測方法およびコンピュータプログラム
出願人
株式会社東芝
,
東芝エネルギーシステムズ株式会社
代理人
個人
,
個人
,
個人
,
個人
主分類
B23K
26/00 20140101AFI20231026BHJP(工作機械;他に分類されない金属加工)
要約
【課題】本発明の実施形態は、溶接箇所の移動の影響を補正した溶け込み深さを算出可能にする計測装置、計測方法およびコンピュータプログラムを提供する。
【解決手段】本実施形態に係る計測装置は、レーザ溶接中に溶接箇所から発生する弾性波を検出するセンサを備える。前記装置はさらに、レーザ溶接中のセンサの位置の経時的な変動を示すセンサ位置情報とレーザ溶接中の溶接位置の経時的な変動を示す溶接位置情報とを取得する位置情報取得部を備える。前記装置はさらに、センサ位置情報および溶接位置情報に基づいてレーザ溶接中のセンサと溶接箇所との間の距離の経時的な変動を示す距離情報を算出し、距離情報に基づいてレーザ溶接中にセンサにより検出された弾性波の経時的な変動を示す弾性波データを補正し、補正された弾性波データに基づいてレーザ溶接の溶け込み深さの経時的な変動を示す溶け込み深さ情報を算出する演算処理装置を備える。
【選択図】図1
特許請求の範囲
【請求項1】
レーザ溶接中において、溶接箇所から発生する弾性波を検出するセンサと、
前記レーザ溶接中における前記センサの位置の経時的な変動を示すセンサ位置情報と、前記レーザ溶接中における前記溶接箇所の位置の経時的な変動を示す溶接位置情報と、を取得する位置情報取得部と、
前記レーザ溶接についての演算を行う演算処理装置であって、
前記センサ位置情報および前記溶接位置情報に基づいて、前記レーザ溶接中における前記センサと前記溶接箇所との間の距離の経時的な変動を示す距離情報を算出し、
前記距離情報に基づいて、前記レーザ溶接中に前記センサにより検出された弾性波の経時的な変動を示す弾性波データを補正し、
前記補正された弾性波データに基づいて、前記レーザ溶接の溶け込み深さの経時的な変動を示す溶け込み深さ情報を算出する
演算処理装置と、
を備える計測装置。
続きを表示(約 1,500 文字)
【請求項2】
前記位置情報取得部は、
前記レーザ溶接に用いられるレーザ光を前記レーザ溶接の対象物に照射する溶接ヘッドまたは前記溶接箇所と、前記センサとを観測するカメラを備える
請求項1に記載の計測装置。
【請求項3】
前記演算処理装置は、前記レーザ溶接と同時進行で、前記溶け込み深さ情報を算出し出力する
請求項1または2に記載の計測装置。
【請求項4】
前記演算処理装置は、前記溶け込み深さ情報または前記溶け込み深さ情報から得られた情報をユーザインタフェースに出力する、または、前記溶け込み深さ情報に基づいて前記レーザ溶接を制御する、請求項1に記載の計測装置。
【請求項5】
前記演算処理装置は、前記センサにより検出された弾性波が含む縦波成分および横波成分のうち少なくとも一方を、前記距離情報に基づいて補正する
請求項1に記載の計測装置。
【請求項6】
レーザ溶接中において、溶接箇所から発生する弾性波を、前記レーザ溶接の対象物に対して非接触状態で検出するセンサであって、前記レーザ溶接に用いられる溶接ヘッドに固定されているセンサと、
前記レーザ溶接についての演算を行う演算処理装置であって、
前記センサと前記溶接箇所との間の距離に基づいて、前記レーザ溶接中に前記センサにより検出された弾性波の経時的な変動を示す弾性波データを補正し、
前記補正された弾性波データに基づいて、前記レーザ溶接の溶け込み深さの経時的な変動を示す溶け込み深さ情報を算出する
演算処理装置と、
を備える計測装置。
【請求項7】
前記演算処理装置は、前記レーザ溶接と同時進行で、前記溶け込み深さ情報を算出し出力する
請求項6に記載の計測装置。
【請求項8】
前記演算処理装置は、前記センサにより検出された弾性波が含む縦波成分および横波成分のうち少なくとも一方を、前記センサと前記溶接箇所との間の距離に基づいて補正する
請求項6または7に記載の計測装置。
【請求項9】
レーザ溶接中において、溶接箇所から発生する弾性波をセンサにより検出し、
前記レーザ溶接中における前記センサの位置の経時的な変動を示すセンサ位置情報と、前記レーザ溶接中における前記溶接箇所の位置の経時的な変動を示す溶接位置情報とを取得し、
前記センサ位置情報および前記溶接位置情報に基づいて、前記レーザ溶接中における前記センサと前記溶接箇所との間の距離の経時的な変動を示す距離情報を算出し、
前記距離情報に基づいて、前記レーザ溶接中に前記センサにより検出された弾性波の経時的な変動を示す弾性波データを補正し、
前記補正された弾性波データに基づいて、前記レーザ溶接の溶け込み深さの経時的な変動を示す溶け込み深さ情報を算出する
ことを含む計測方法。
【請求項10】
レーザ溶接中において、溶接箇所から発生する弾性波を、前記レーザ溶接の対象物に対して非接触状態にあるセンサであって、前記レーザ溶接に用いられる溶接ヘッドに固定されているセンサにより検出し、
前記センサと前記溶接箇所との間の距離に基づいて、前記レーザ溶接中に前記センサにより検出された弾性波の経時的な変動を示す弾性波データを補正し、
前記補正された弾性波データに基づいて、前記レーザ溶接の溶け込み深さの経時的な変動を示す溶け込み深さ情報を算出する
ことを含む計測方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明の実施形態は、計測装置、計測方法およびコンピュータプログラムに関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
レーザ溶接において、溶接中の溶接箇所でアコースティックエミッション(AE:Acoustic Emission)によって発生するAE波をAEセンサにより検出し、AE波の検出により得られたAE信号を溶接箇所の異常判別や溶け込み深さの予測などの品質評価に用いることが知られている。溶接中に発生するAE波は、弾性波の一種である。しかしながら、レーザ溶接位置とAEセンサ設置位置との距離の変化によって、検出されるAE信号強度(AE信号レベル)が変動することから、溶接の進行に伴いレーザ溶接位置が移動すると、AE信号強度が常に変動する。また、意図せずAEセンサの設置位置がずれた等の原因でレーザ溶接位置とAEセンサ設置位置との距離が変化した場合も同様にAE信号強度が変動する。以上のようなAE信号強度の変動は、溶接箇所の品質評価に影響を与える。
【先行技術文献】
【特許文献】
【0003】
特開2020-266404号公報
特開2007-111745号公報
特開2004-038448号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
本発明の実施形態は、溶接箇所の移動の影響を補正した溶け込み深さを算出可能にする計測装置、計測方法およびコンピュータプログラムを提供する。
【課題を解決するための手段】
【0005】
本実施形態に係る計測装置は、レーザ溶接中において、溶接箇所から発生する弾性波を検出するセンサを備える。前記装置はさらに、前記レーザ溶接中における前記センサの位置の経時的な変動を示すセンサ位置情報と、前記レーザ溶接中における前記溶接箇所の位置の経時的な変動を示す溶接位置情報と、を取得する位置情報取得部を備える。前記装置はさらに、前記レーザ溶接についての演算を行う演算処理装置であって、前記センサ位置情報および前記溶接位置情報に基づいて、前記レーザ溶接中における前記センサと前記溶接箇所との間の距離の経時的な変動を示す距離情報を算出し、前記距離情報に基づいて、前記レーザ溶接中に前記センサにより検出された弾性波の経時的な変動を示す弾性波データを補正し、前記補正された弾性波データに基づいて、前記レーザ溶接の溶け込み深さの経時的な変動を示す溶け込み深さ情報を算出する演算処理装置を備える。
【図面の簡単な説明】
【0006】
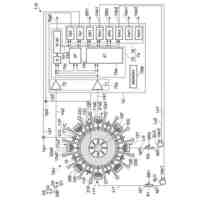
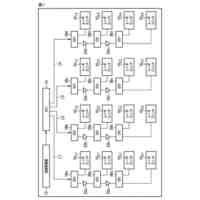
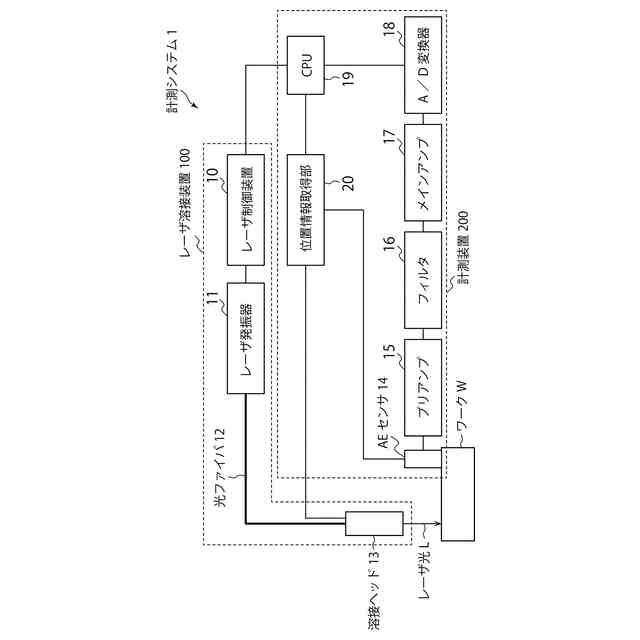
第1実施形態に係る計測システムのブロック図。
第1実施形態のレーザ溶接の過程の一例を説明する上面図。
第1実施形態のレーザ溶接の過程の別の例を説明する上面図。
第1実施形態のレーザ溶接の過程の別の例を説明する上面図。
検出されたAEデータを示す図。
補正されたAEデータを示す図。
溶け込み深さの計測結果を示す図。
第1実施形態に係るCPUが行う処理の一例を示すフローチャート。
第2実施形態に係る計測システムのブロック図。
第3実施形態に係る計測システムのブロック図。
【発明を実施するための形態】
【0007】
以下、図面を参照しながら、本発明の実施形態について説明する。
【0008】
(第1実施形態)
図1は、第1実施形態に係る計測システム1のブロック図である。計測システム1は、レーザ溶接装置100と計測装置200とを備える。レーザ溶接装置100と計測装置200は一体となっていてもよいし、レーザ溶接装置100の外部に計測装置200が設置されていてもよい。以下、図1を参照して計測システム1について説明し、その説明の中で図2~図7も参照する。
【0009】
レーザ溶接装置100は、レーザ制御装置10と、レーザ発振器11と、光ファイバ12と、溶接ヘッド13とを備える。
【0010】
レーザ制御装置10は、レーザ発振器11を制御する。例えば、レーザ発振器11が出力するレーザのパワーや、レーザ発振器11がレーザ照射を開始、中断または終了するタイミングを制御する。レーザ制御装置10は、レーザ出力を開始、中断または終了する際に、その旨を後述するCPU19に通知する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社東芝
電池
2日前
株式会社東芝
配電盤
1か月前
株式会社東芝
センサ
27日前
株式会社東芝
電解装置
2日前
株式会社東芝
制御回路
1か月前
株式会社東芝
端子構造
1か月前
株式会社東芝
電源回路
2日前
株式会社東芝
駆動回路
1か月前
株式会社東芝
吸音装置
1か月前
株式会社東芝
除去装置
2か月前
株式会社東芝
半導体装置
6日前
株式会社東芝
半導体装置
6日前
株式会社東芝
半導体装置
6日前
株式会社東芝
半導体装置
5日前
株式会社東芝
半導体装置
5日前
株式会社東芝
半導体装置
5日前
株式会社東芝
半導体装置
5日前
株式会社東芝
半導体装置
2日前
株式会社東芝
半導体装置
3日前
株式会社東芝
半導体装置
6日前
株式会社東芝
半導体装置
3日前
株式会社東芝
半導体装置
2日前
株式会社東芝
半導体装置
2日前
株式会社東芝
半導体装置
6日前
株式会社東芝
半導体装置
2日前
株式会社東芝
半導体装置
6日前
株式会社東芝
偏向電磁石
1か月前
株式会社東芝
半導体装置
2か月前
株式会社東芝
半導体装置
2か月前
株式会社東芝
レーダ装置
2か月前
株式会社東芝
半導体装置
1か月前
株式会社東芝
半導体装置
1か月前
株式会社東芝
軸流ファン
1か月前
株式会社東芝
半導体装置
1か月前
株式会社東芝
半導体装置
6日前
株式会社東芝
半導体装置
27日前
続きを見る
他の特許を見る







 特許ウォッチ
特許ウォッチ