TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025177990
公報種別
公開特許公報(A)
公開日
2025-12-05
出願番号
2024085194
出願日
2024-05-24
発明の名称
深度測定装置、深度測定方法及び深度測定プログラム
出願人
株式会社トヨタプロダクションエンジニアリング
代理人
弁理士法人白坂
主分類
G01B
15/00 20060101AFI20251128BHJP(測定;試験)
要約
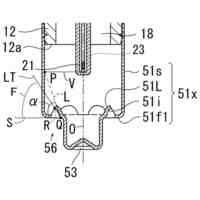
【課題】 放射線源と検出器との相対位置関係のずれに起因する測定精度の低下を抑制することができる深度測定装置、深度測定方法及び深度測定プログラムを提供する。
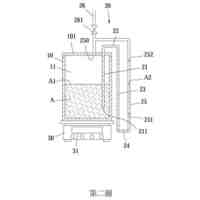
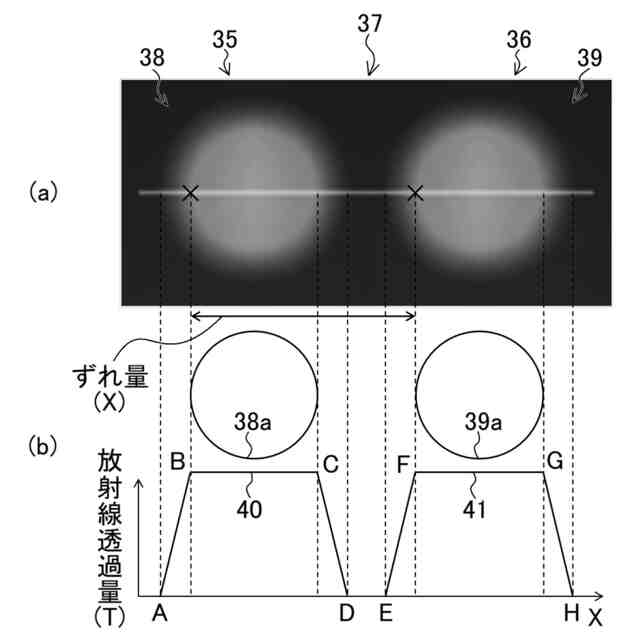
【解決手段】 本発明に係る深度測定装置等は、放射線源と、放射線源に対して固定され正対し放射線を検出する検出器と、奥行き方向における放射線源からの距離が第1距離であって、検出器の検出面に沿う方向における放射線源からの距離が第2距離である第1位置に存在する対象物を撮像した第1撮像画像を取得し、奥行き方向における放射線源からの距離が第1距離であって、検出面に沿う方向における放射線源からの距離が第3距離である第2位置に存在する対象物を撮像した第2撮像画像を取得し、対象物における第1撮像画像と第2撮像画像との間のずれ量を特定し、固定距離と、第2距離と第3距離との差分と、ずれ量と、に基づいて第1距離を算出する。
【選択図】図5
特許請求の範囲
【請求項1】
放射線を放射する放射線源と、
前記放射線源に対して固定された固定距離を保って正対し、前記放射線源が放射した放射線を検出する検出器と、
前記放射線源から前記検出器に向かう奥行き方向における前記放射線源からの距離が第1距離であって、前記検出器の検出面に沿う方向における前記放射線源からの距離が第2距離である第1位置に存在する対象物を撮像した第1撮像画像を取得する第1取得部と、
前記奥行き方向における前記放射線源からの距離が前記第1距離であって、前記検出器の検出面に沿う方向における前記放射線源からの距離が前記第2距離とは異なる第3距離である第2位置に存在する前記対象物を撮像した第2撮像画像を取得する第2取得部と、
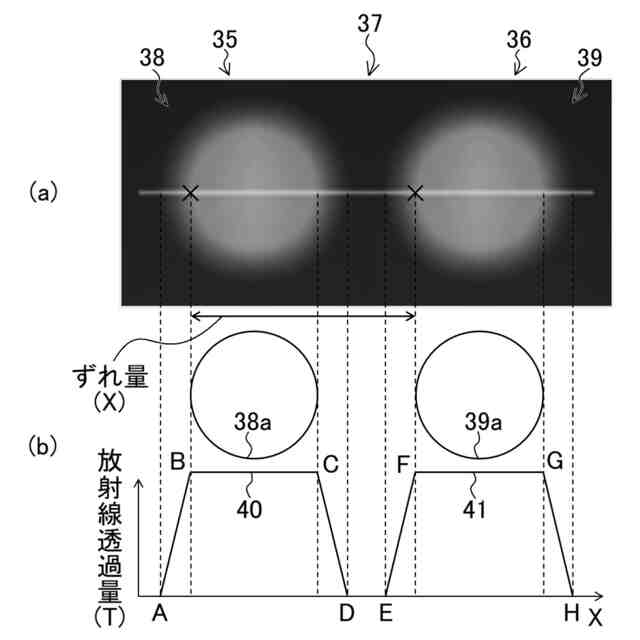
前記第1撮像画像に含まれる前記対象物と、前記第2撮像画像に含まれる前記対象物と、の間のずれ量を特定する特定部と、
前記固定距離と、前記第2距離と前記第3距離との差分と、前記ずれ量と、に基づいて前記第1距離を算出する算出部と、
を備えることを特徴とする深度測定装置。
続きを表示(約 1,600 文字)
【請求項2】
前記固定距離を保ったまま、前記放射線源と前記検出器とを前記検出器の検出面に沿う方向における同方向に移動させる移動機構を備え、
前記差分は、前記第1撮像画像を撮像した時の前記放射線源の位置から、前記第2撮像画像を撮像した時の前記放射線源の位置までの移動距離である
ことを特徴とする請求項1に記載の深度測定装置。
【請求項3】
前記移動機構は、前記固定距離を保って正対する前記放射線源と前記検出器とが接続された接続部材を、前記検出器の検出面に沿う方向に移動させるロボットアームである
ことを特徴とする請求項2に記載の深度測定装置。
【請求項4】
前記放射線源と前記検出器との位置を固定し、前記放射線源と前記検出器との間を前記検出器の検出面に沿う方向に前記対象物を移動させる移動機構を備え、
前記差分は、前記第1撮像画像を撮像した時の前記対象物の位置から、前記第2撮像画像を撮像した時の前記対象物の位置までの移動距離である
ことを特徴とする請求項1に記載の深度測定装置。
【請求項5】
前記算出部は、前記差分を前記ずれ量で除し、前記固定距離を乗じて前記第1距離を算出する
ことを特徴とする請求項1~4のいずれか一項に記載の深度測定装置。
【請求項6】
前記第1距離を出力する出力部を備える
ことを特徴とする請求項5に記載の深度測定装置。
【請求項7】
放射線を放射する放射線源と、前記放射線源に対して固定された固定距離を保って正対し、前記放射線源が放射した放射線を検出する検出器とのそれぞれとの間で通信が可能なコンピュータが、
前記放射線源から前記検出器に向かう奥行き方向における前記放射線源からの距離が第1距離であって、前記検出器の検出面に沿う方向における前記放射線源からの距離が第2距離である第1位置に存在する対象物を撮像した第1撮像画像を取得する第1取得ステップと、
前記奥行き方向における前記放射線源からの距離が前記第1距離であって、前記検出器の検出面に沿う方向における前記放射線源からの距離が前記第2距離とは異なる第3距離である第2位置に存在する前記対象物を撮像した第2撮像画像を取得する第2取得ステップと、
前記第1撮像画像に含まれる前記対象物と、前記第2撮像画像に含まれる前記対象物と、の間のずれ量を特定する特定ステップと、
前記固定距離と、前記第2距離と前記第3距離との差分と、前記ずれ量と、に基づいて前記第1距離を算出する算出ステップと、
を実行することを特徴とする深度測定方法。
【請求項8】
放射線を放射する放射線源と、前記放射線源に対して固定された固定距離を保って正対し、前記放射線源が放射した放射線を検出する検出器とのそれぞれとの間で通信が可能なコンピュータに、
前記放射線源から前記検出器に向かう奥行き方向における前記放射線源からの距離が第1距離であって、前記検出器の検出面に沿う方向における前記放射線源からの距離が第2距離である第1位置に存在する対象物を撮像した第1撮像画像を取得する第1取得機能と、
前記奥行き方向における前記放射線源からの距離が前記第1距離であって、前記検出器の検出面に沿う方向における前記放射線源からの距離が前記第2距離とは異なる第3距離である第2位置に存在する前記対象物を撮像した第2撮像画像を取得する第2取得機能と、
前記第1撮像画像に含まれる前記対象物と、前記第2撮像画像に含まれる前記対象物と、の間のずれ量を特定する特定機能と、
前記固定距離と、前記第2距離と前記第3距離との差分と、前記ずれ量と、に基づいて前記第1距離を算出する算出機能と、
を実現させることを特徴とする深度測定プログラム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、深度測定装置、深度測定方法、及び深度測定プログラムに関し、特に放射線でもって測定する深度測定装置、深度測定方法、及び深度測定プログラムに関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
従来、放射線を利用して物体の内部情報を画像でもって取得する技術が利用されてきた。中でもトモシンセシス技術の利用が普及しつつある。トモシンセシス技術とは、放射線の被検体への照射角度を変化させて取得した複数の投影画像を再構築することにより、被検体の内部情報を高精度に取得する技術のことをいう。
【0003】
例えば、特許文献1に開示の断層画像生成装置は、放射線源を検出器の検出面に対して相対的に移動させ、放射線源の移動による複数の放射線源の位置において被検体に放射線を照射するトモシンセシス撮影を行う。特許文献1に開示の断層画像生成装置は、被検体の高画質の断層画像を取得できるとしている。
【0004】
しかし、特許文献1に開示の断層画像生成装置は、放射線源を検出器の検出面に対して相対的に移動させるため、トモシンセシス技術における複数の投影画像を取得する際の放射線源と検出器との相対位置関係が投影画像を取得する度に異なり、このことが取得する被検体の断層画像の精度を低下させる要因となるおそれが有った。
【0005】
そして、トモシンセシス技術を用いて被検体内部の対象物の深度を測定する深度測定装置においても、放射線源を検出器の検出面に対して相対的に移動させる構成は、特許文献1に開示の断層画像生成装置と同様に、測定される深度の精度を低下させる要因の一つとなるおそれがあった。
【先行技術文献】
【特許文献】
【0006】
再表2020-067475号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
そこで、本発明は、放射線源と検出器との相対位置関係のずれに起因する測定精度の低下を抑制する深度測定装置、深度測定方法、及び深度測定プログラムを提供することを目的とする。
【課題を解決するための手段】
【0008】
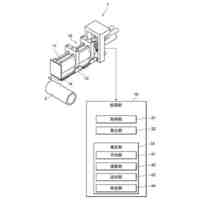
すなわち、第1の態様に係る深度測定装置は、放射線を放射する放射線源と、放射線源に対して固定された固定距離を保って正対し、放射線源が放射した放射線を検出する検出器と、放射線源から検出器に向かう奥行き方向における放射線源からの距離が第1距離であって、検出器の検出面に沿う方向における放射線源からの距離が第2距離である第1位置に存在する対象物を撮像した第1撮像画像を取得する第1取得部と、奥行き方向における放射線源からの距離が第1距離であって、検出器の検出面に沿う方向における放射線源からの距離が第2距離とは異なる第3距離である第2位置に存在する対象物を撮像した第2撮像画像を取得する第2取得部と、第1撮像画像に含まれる対象物と、第2撮像画像に含まれる対象物と、の間のずれ量を特定する特定部と、固定距離と、第2距離と第3距離との差分と、ずれ量と、に基づいて第1距離を算出する算出部と、を備えることを特徴とする。
【0009】
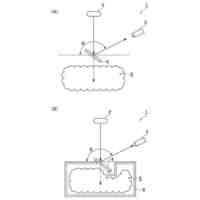
第2の態様は、第1の態様に係る深度測定装置において、固定距離を保ったまま、放射線源と検出器とを検出器の検出面に沿う方向における同方向に移動させる移動機構を備え、差分は、第1撮像画像を撮像した時の放射線源の位置から、第2撮像画像を撮像した時の放射線源の位置までの移動距離であることとしてもよい。
【0010】
第3の態様は、第2の態様に係る深度測定装置において、移動機構は、固定距離を保って正対する放射線源と検出器とが接続された接続部材を、検出器の検出面に沿う方向に移動させるロボットアームであることとしてもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
視触覚センサ
1日前
日本精機株式会社
検出装置
1か月前
個人
採尿及び採便具
1か月前
個人
計量機能付き容器
26日前
株式会社ミツトヨ
測定器
1か月前
甲神電機株式会社
電流検出装置
1か月前
日本精機株式会社
発光表示装置
9日前
株式会社カクマル
境界杭
16日前
ユニパルス株式会社
トルク変換器
1日前
ユニパルス株式会社
トルク変換器
1日前
ユニパルス株式会社
トルク変換器
1日前
株式会社トプコン
測量装置
8日前
アズビル株式会社
電磁流量計
1か月前
大成建設株式会社
風洞実験装置
26日前
愛知電機株式会社
軸部材の外観検査装置
1か月前
大和製衡株式会社
組合せ計量装置
1か月前
日本特殊陶業株式会社
ガスセンサ
8日前
愛知時計電機株式会社
ガスメータ
1か月前
日本特殊陶業株式会社
ガスセンサ
1日前
個人
非接触による電磁パルスの測定方法
29日前
大和製衡株式会社
組合せ計量装置
1か月前
個人
計量具及び計量機能付き容器
26日前
個人
システム、装置及び実験方法
1か月前
日本特殊陶業株式会社
ガスセンサ
24日前
日本特殊陶業株式会社
ガスセンサ
2日前
双庸電子株式会社
誤配線検査装置
1か月前
日本信号株式会社
距離画像センサ
29日前
日本特殊陶業株式会社
センサ
1か月前
株式会社不二越
X線測定装置
29日前
日東精工株式会社
振動波形検査装置
1か月前
個人
液位検視及び品質監視システム
24日前
キーコム株式会社
画像作成システム
16日前
日本特殊陶業株式会社
センサ
10日前
本陣水越株式会社
車載式計測標的物
3日前
トヨタ自動車株式会社
測定システム
1か月前
株式会社タイガーカワシマ
揚穀装置
8日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ