TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025177402
公報種別
公開特許公報(A)
公開日
2025-12-05
出願番号
2024084206
出願日
2024-05-23
発明の名称
車両制御装置
出願人
スズキ株式会社
代理人
弁理士法人東京国際特許事務所
主分類
B60T
7/12 20060101AFI20251128BHJP(車両一般)
要約
【課題】車両を周囲に存在する障害物に近づける際に、車両に減速度が発生することで起こり得る自動ブレーキの不要な作動を抑制可能な車両制御装置を提供する。
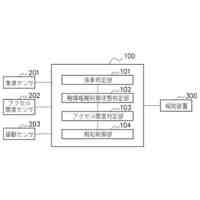
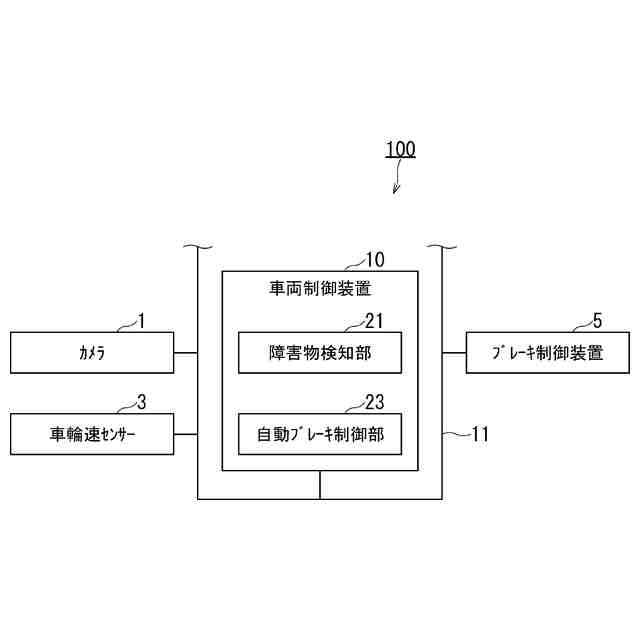
【解決手段】車両制御装置10は、車両と障害物との相対距離および相対速度を検知する障害物検知部21と、相対距離および相対速度から算出される衝突予測時間が所定衝突予測時間より短くなった場合には、自動ブレーキを作動させる自動ブレーキ制御部23と、を備えている。自動ブレーキ制御部23は、相対距離と相対速度における自動ブレーキを開始する距離との差分が所定距離より短くなった時点から所定時間を経過後に自動ブレーキの作動がない場合には、自動ブレーキの作動を開始させるタイミングを遅らせる、または、自動ブレーキの作動を禁止する。
【選択図】図1
特許請求の範囲
【請求項1】
車両と障害物との相対距離および相対速度を検知する障害物検知部と、
前記相対距離および前記相対速度から算出される衝突予測時間が所定衝突予測時間より短くなった場合には、自動ブレーキを作動させる自動ブレーキ制御部と、を備え、
前記自動ブレーキ制御部は、前記相対距離と前記相対速度における前記自動ブレーキを開始する距離との差分が所定距離より短くなった時点から所定時間を経過後に前記自動ブレーキの作動がない場合には、前記自動ブレーキの作動を開始させるタイミングを遅らせる、または、前記自動ブレーキの作動を禁止する車両制御装置。
続きを表示(約 590 文字)
【請求項2】
前記障害物は、静止している請求項1に記載の車両制御装置。
【請求項3】
前記所定距離は、前記自動ブレーキの作動時に、前記車両と前記障害物との衝突を回避できる限界距離と、前記限界距離のばらつきとから決定される請求項1に記載の車両制御装置。
【請求項4】
前記所定時間の最低値は、前記車両に減速度が発生していない場合に前記自動ブレーキが作動するまでの時間である請求項1に記載の車両制御装置。
【請求項5】
前記自動ブレーキの作動を禁止する時間は、前記車両に減速度が発生している場合に、前記差分が前記所定距離より短くなった時点から0になるまでの時間に基づいて決定される請求項1に記載の車両制御装置。
【請求項6】
前記車両に減速度が発生している場合に、前記差分が前記所定距離より短くなった時点から0になるまでの時間が前記減速度によって長くなるほど、前記自動ブレーキを禁止する時間を長くする請求項1に記載の車両制御装置。
【請求項7】
前記車両が停車した位置から静止している前記障害物までの距離を学習し、
前記距離が短い傾向にあるほど、前記自動ブレーキの作動を開始させる前記タイミングを遅くする、または、前記自動ブレーキの作動を禁止する時間を長くする請求項1に記載の車両制御装置。
発明の詳細な説明
【技術分野】
【0001】
本発明の実施形態は、車両制御装置に関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
障害物と自車との距離を、障害物と自車との速度差で除算した値である衝突時間を自動ブレーキの作動開始閾値とする車両用自動制動装置が知られている。衝突時間は、衝突予測時間とも呼ばれる。
【先行技術文献】
【特許文献】
【0003】
特開2007-62604号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、自動ブレーキを備えた車両において、車両の減速度がすでに発生しているにもかかわらず、周囲に存在する障害物に車両を近づけることで自動ブレーキの作動開始閾値を下回り、自動ブレーキが作動してしまう場合がある。この場合の自動ブレーキの作動は、不要な作動であり、抑制することが望まれている。
【0005】
本発明は、上記のような実状に鑑みてなされたものであり、車両を周囲に存在する障害物に近づける際に、車両に減速度が発生することで起こり得る自動ブレーキの不要な作動を抑制可能な車両制御装置を提供する。
【課題を解決するための手段】
【0006】
前記課題を解決するために本発明の実施形態に係る車両制御装置は、車両と障害物との相対距離および相対速度を検知する障害物検知部と、前記相対距離および前記相対速度から算出される衝突予測時間が所定衝突予測時間より短くなった場合には、自動ブレーキを作動させる自動ブレーキ制御部と、を備え、前記自動ブレーキ制御部は、前記相対距離と前記相対速度における前記自動ブレーキを開始する距離との差分が所定距離より短くなった時点から所定時間を経過後に前記自動ブレーキの作動がない場合には、前記自動ブレーキの作動を開始させるタイミングを遅らせる、または、前記自動ブレーキの作動を禁止する。
【発明の効果】
【0007】
本発明により、車両を周囲に存在する障害物に近づける際に、車両に減速度が発生していることで起こり得る自動ブレーキの不要な作動を抑制可能な車両制御装置が提供される。
【図面の簡単な説明】
【0008】
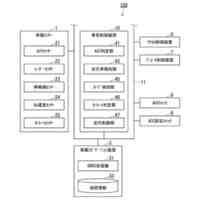
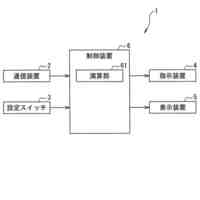
本発明の実施形態に係る車両制御装置を含む車両制御システムのブロック図。
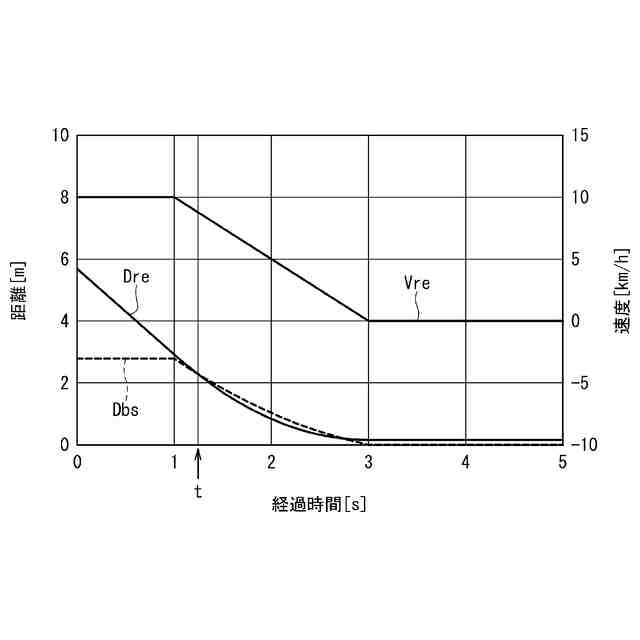
従来の自動ブレーキを備えた車両における自動ブレーキの不要な動作の一例を示す図。
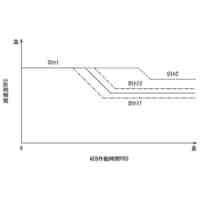
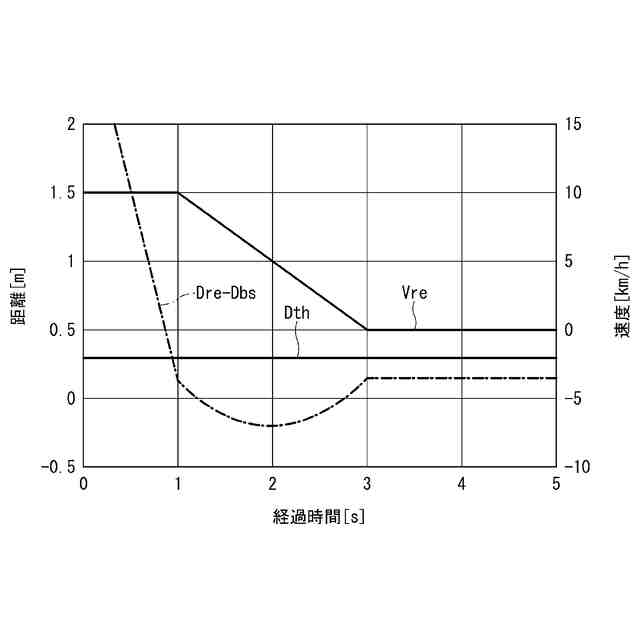
本発明の実施形態に係る車両制御装置の自動ブレーキ抑制制御において、車両と障害物との相対距離と、相対速度における自動ブレーキを開始する距離との差の時間変化を示す図。
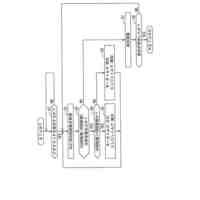
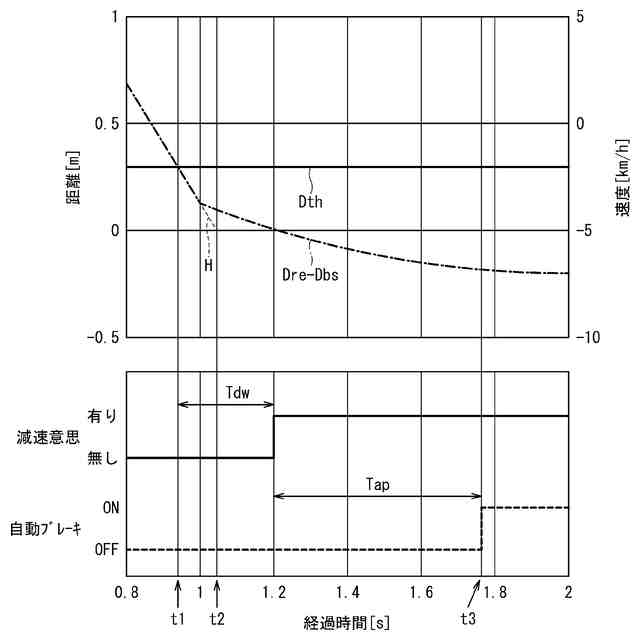
図3における経過時間が1秒付近の拡大図と、運転者の減速意思の判定に基づく自動ブレーキ抑制制御の例を示すタイミングチャート。
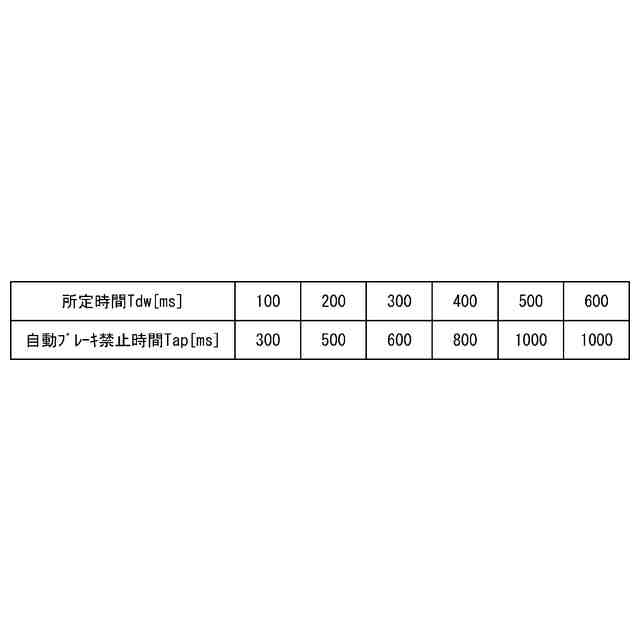
本発明の実施形態に係る車両制御装置において、所定時間と自動ブレーキ禁止時間との対応関係を表すデータテーブルの一例を示す図である。
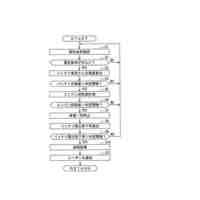
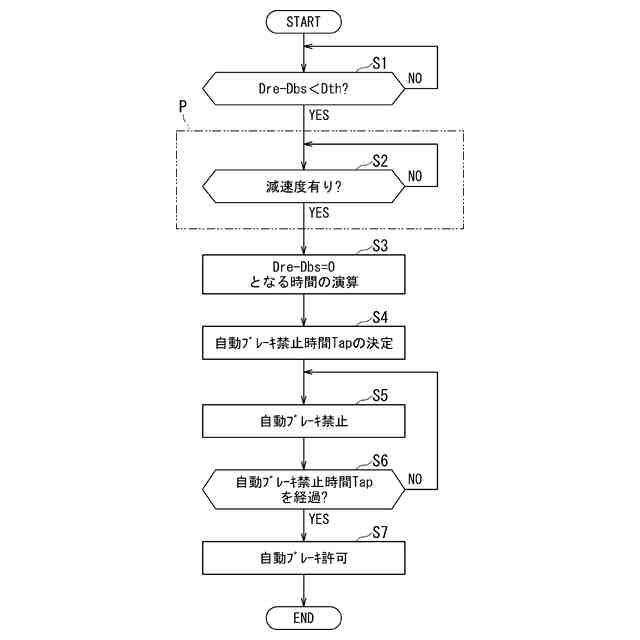
本発明の実施形態に係る車両制御装置による自動ブレーキ抑制制御の一例を示すフローチャート。
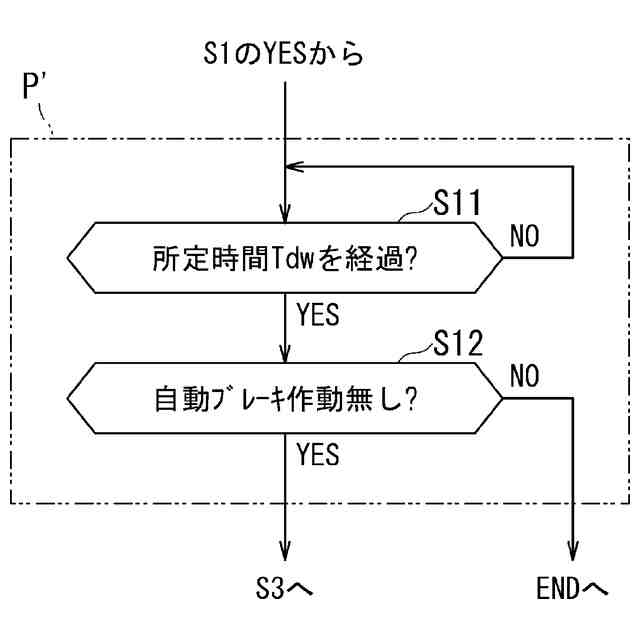
図6における2点鎖線Pで囲われた処理の代替処理を示すフローチャート。
【発明を実施するための形態】
【0009】
本発明の車両制御装置に係る実施形態ついて、図1から図7を参照して説明する。
【0010】
図1は、本発明の実施形態に係る車両制御装置を含む車両制御システムのブロック図である。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
スズキ株式会社
車両構造
1か月前
スズキ株式会社
車室構造
1か月前
スズキ株式会社
開閉機構
1か月前
スズキ株式会社
車両構造
1か月前
スズキ株式会社
車両構造
1か月前
スズキ株式会社
車両構造
1か月前
スズキ株式会社
車両構造
1か月前
スズキ株式会社
車室構造
1か月前
スズキ株式会社
車室構造
1か月前
スズキ株式会社
車両構造
1か月前
スズキ株式会社
車両構造
1か月前
スズキ株式会社
リッド構造
今日
スズキ株式会社
車体カバー
7日前
スズキ株式会社
シート構造
1か月前
スズキ株式会社
シート構造
1か月前
スズキ株式会社
リッド構造
今日
スズキ株式会社
動力伝達装置
28日前
スズキ株式会社
車両検査装置
1か月前
スズキ株式会社
車両後部構造
1か月前
スズキ株式会社
車両側部構造
1か月前
スズキ株式会社
車両制御装置
28日前
スズキ株式会社
電源システム
今日
スズキ株式会社
運転支援装置
15日前
スズキ株式会社
車両制御装置
今日
スズキ株式会社
車体下部構造
今日
スズキ株式会社
車体下部構造
今日
スズキ株式会社
車両用変速機
今日
スズキ株式会社
パーツボックス
15日前
スズキ株式会社
車両用制御装置
1か月前
スズキ株式会社
車両の制御装置
1か月前
スズキ株式会社
車両用制御装置
1か月前
スズキ株式会社
車両の制御装置
9日前
スズキ株式会社
車両用制御装置
今日
スズキ株式会社
車両の制御装置
1か月前
スズキ株式会社
パーツボックス
15日前
スズキ株式会社
車両用ルーフ構造
28日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ