TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025176732
公報種別
公開特許公報(A)
公開日
2025-12-05
出願番号
2024082993
出願日
2024-05-22
発明の名称
車両および車両制御インターフェース
出願人
トヨタ自動車株式会社
代理人
弁理士法人深見特許事務所
主分類
B60W
50/02 20120101AFI20251128BHJP(車両一般)
要約
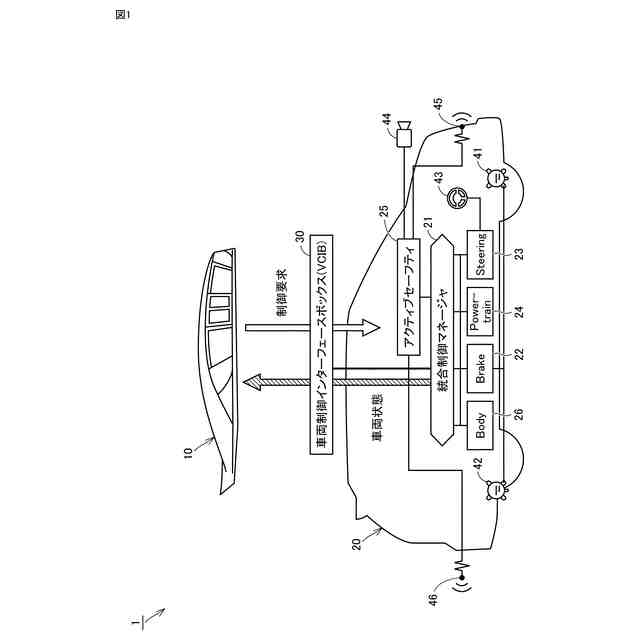
【課題】車両プラットフォーム(VP)における車両制御を適切に行う。
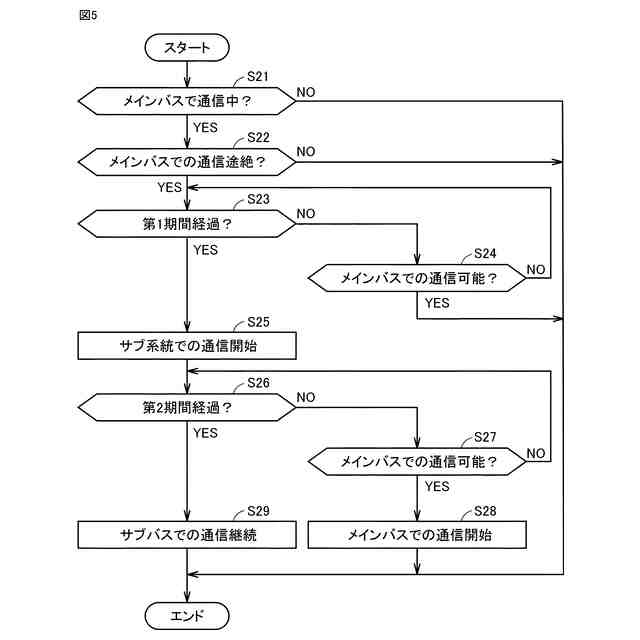
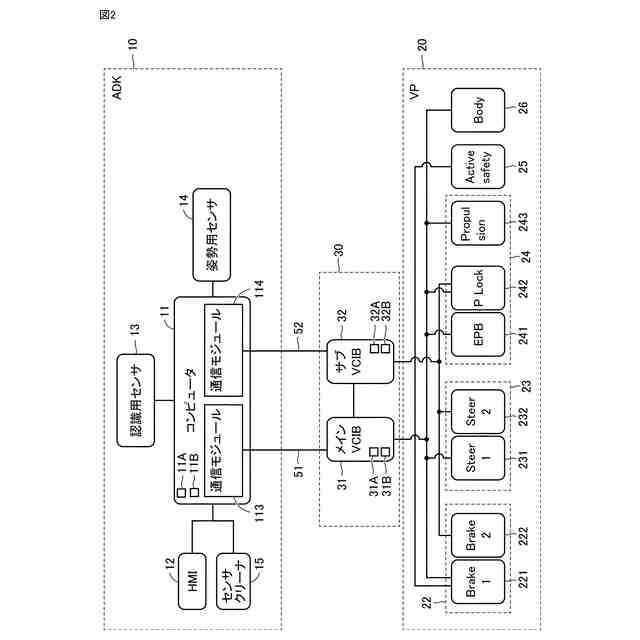
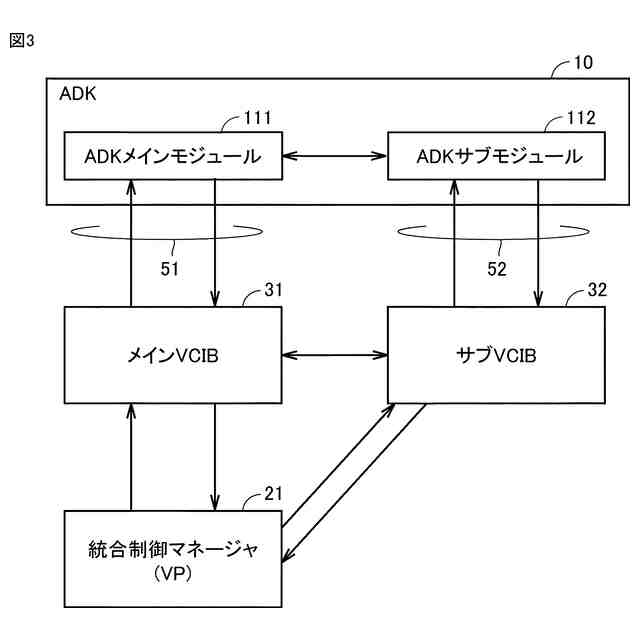
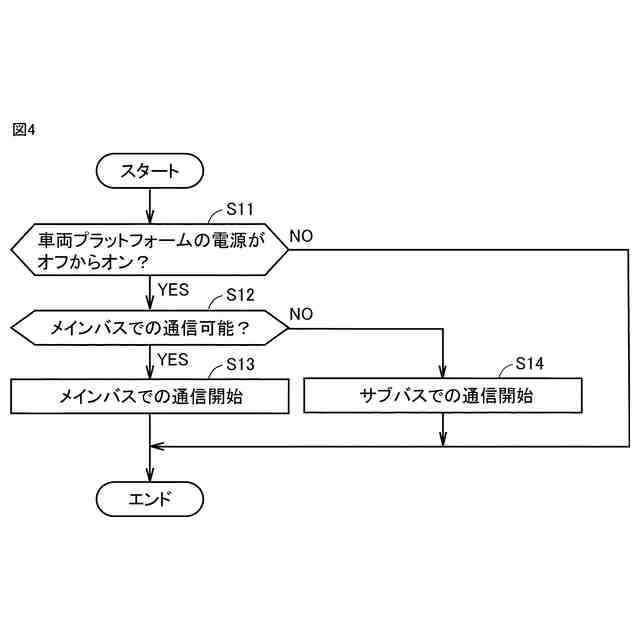
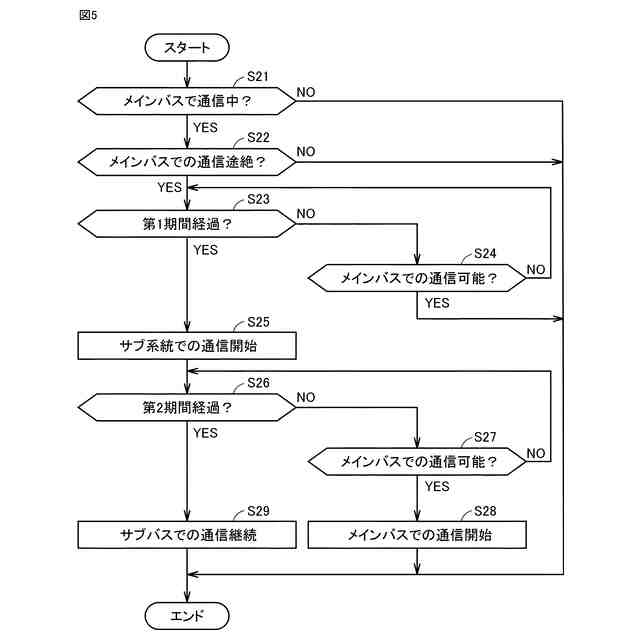
【解決手段】車両1は、ADK3を搭載可能に構成されている。車両1は、ADK10からの指令に従って車両制御を実行するVP20と、ADK10とVP20との間のインターフェースを、メインバス51経由またはサブバス52経由の通信により行うVCIB30とを備える。VCIB30は、メインバス51経由の通信が途絶した場合、サブバス52経由の通信を開始し、サブバス52経由の通信開始後、所定期間が経過する前にメインバス51経由の通信が可能になった場合には、メインバス51経由の通信を開始する一方で、所定期間が経過すると、メインバス51経由の通信が可能か否かにかかわらず、サブバス52経由の通信を継続する。
【選択図】図5
特許請求の範囲
【請求項1】
自動運転システムを搭載可能に構成された車両であって、
前記自動運転システムからの指令に従って車両制御を実行する車両プラットフォームと、
前記自動運転システムと前記車両プラットフォームとの間のインターフェースを、メイン系統経由またはサブ系統経由の通信により行う車両制御インターフェースとを備え、
前記車両制御インターフェースは、
前記メイン系統経由の通信が途絶した場合、前記サブ系統経由の通信を開始し、
前記サブ系統経由の通信開始後、所定期間が経過する前に前記メイン系統経由の通信が可能になった場合には前記メイン系統経由の通信を開始する一方で、前記所定期間が経過すると、前記メイン系統経由の通信が可能か否かにかかわらず、前記サブ系統経由の通信を継続する、車両。
続きを表示(約 530 文字)
【請求項2】
前記車両制御インターフェースは、前記所定期間の経過後、前記自動運転システムによる走行計画が完了するまでの間、前記サブ系統経由の通信を継続する、請求項1に記載の車両。
【請求項3】
前記車両制御インターフェースは、前記走行計画の完了後、前記車両プラットフォームの電源がオフからオンに切り替えられ、かつ、前記メイン系統経由の通信が可能である場合には、前記メイン系統経由で通信する、請求項2に記載の車両。
【請求項4】
自動運転システムと車両プラットフォームとの間のインターフェースを行う車両制御インターフェースであって、
メイン系統経由またはサブ系統経由で前記自動運転システムと通信するプロセッサを備え、
前記プロセッサは、
前記メイン系統経由の通信が途絶した場合、前記サブ系統経由の通信を開始し、
前記サブ系統経由の通信開始後、所定期間が経過する前に前記メイン系統経由の通信が可能になった場合には前記メイン系統経由の通信を開始する一方で、前記所定期間が経過すると、前記メイン系統経由の通信が可能か否かにかかわらず、前記サブ系統経由の通信を継続する、車両制御インターフェース。
発明の詳細な説明
【技術分野】
【0001】
本開示は、車両および車両制御インターフェースに関し、より特定的には、自動運転システムを搭載可能な車両、および、自動運転システムと車両プラットフォームとの間のインターフェースを行う車両制御インターフェースに関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
特開2018-132015号公報(特許文献1)は、自動運転システムが搭載される車両を開示する。自動運転システムは、カメラと、レーザ装置と、レーダ装置と、操作装置と、勾配センサと、自動運転機器と、自動運転ECU(Electronic Control Unit)とを備えている(特許文献1の段落[0023]参照)。
【先行技術文献】
【特許文献】
【0003】
特開2018-132015号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
自動運転システムを車両プラットフォームに外付けすることが考えられる。この場合、車両プラットフォームが自動運転システムからの指令に従って動作することにより自動運転が実現される。このような自動運転システムを以下、自動運転キット(ADK:Autonomous Driving Kit)とも称する。また、車両プラットフォームをVP(Vehicle Platform)とも記載する。
【0005】
ADKとVPとを適切に連携させるためには、ADKとVPとの間に適切なインターフェースを設けることが望ましい。このようなインターフェイスを「車両制御インターフェース」と称する。車両制御インターフェースの重要性は、ADKの開発企業(たとえばベンチャー企業)とVPの開発企業(典型的には完成車両メーカ)とが異なる場合などに特に顕著になり得る。
【0006】
ADKと車両制御インターフェースとの間の通信系統を二重化(冗長化)することが考えられる。二重化された通信系統のうちの一方を「メイン系統」と記載し、他方を「サブ系統」と記載する。
【0007】
正常時におけるADKと車両制御インターフェースとの間の通信は、メイン系統経由で行われる。メイン系統に何らかの障害が発生し、メイン系統経由での通信が途絶した場合、ADKと車両制御インターフェースとの間の通信は、メイン系統経由からサブ系統へと切り替えられる。
【0008】
サブ系統への切り替え後に、メイン系統が障害から復帰して通信可能となる場合がある。本発明者らは、このような状況下では、VPにおける車両制御を適切に行うためには、ADKと車両制御インターフェースとの間の通信系統を適切に選択することを要し得るとの課題を見出した。
【0009】
本開示は上記課題を解決するためになされたものであり、本開示の目的の1つは、車両プラットフォーム(VP)における車両制御を適切に行うことである。
【課題を解決するための手段】
【0010】
本開示のある局面に係る車両は、自動運転システムを搭載可能に構成されている。車両は、自動運転システムからの指令に従って車両制御を実行する車両プラットフォームと、自動運転システムと車両プラットフォームとの間のインターフェースを、メイン系統経由またはサブ系統経由の通信により行う車両制御インターフェースとを備える。車両制御インターフェースは、メイン系統経由の通信が途絶した場合、サブ系統経由の通信を開始し、サブ系統経由の通信開始後、所定期間が経過する前にメイン系統経由の通信が可能になった場合にはメイン系統経由の通信を開始する一方で、所定期間が経過すると、メイン系統経由の通信が可能か否かにかかわらず、サブ系統経由の通信を継続する。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
トヨタ自動車株式会社
配管
18日前
トヨタ自動車株式会社
電池
9日前
トヨタ自動車株式会社
電池
23日前
トヨタ自動車株式会社
電池
17日前
トヨタ自動車株式会社
方法
2日前
トヨタ自動車株式会社
車両
17日前
トヨタ自動車株式会社
電池
9日前
トヨタ自動車株式会社
車両
3日前
トヨタ自動車株式会社
車両
18日前
トヨタ自動車株式会社
ロータ
18日前
トヨタ自動車株式会社
電動車
18日前
トヨタ自動車株式会社
電動車
17日前
トヨタ自動車株式会社
タンク
2日前
トヨタ自動車株式会社
蓄電装置
17日前
トヨタ自動車株式会社
蓄電装置
9日前
トヨタ自動車株式会社
エンジン
17日前
トヨタ自動車株式会社
蓄電装置
9日前
トヨタ自動車株式会社
蓄電装置
9日前
トヨタ自動車株式会社
エンジン
9日前
トヨタ自動車株式会社
制御装置
17日前
トヨタ自動車株式会社
蓄電装置
9日前
トヨタ自動車株式会社
学習装置
17日前
トヨタ自動車株式会社
制御装置
18日前
トヨタ自動車株式会社
制御装置
18日前
トヨタ自動車株式会社
コネクタ
17日前
トヨタ自動車株式会社
蓄電装置
9日前
トヨタ自動車株式会社
蓄電装置
17日前
トヨタ自動車株式会社
蓄電装置
9日前
トヨタ自動車株式会社
蓄電装置
10日前
トヨタ自動車株式会社
判定装置
17日前
トヨタ自動車株式会社
蓄電装置
9日前
トヨタ自動車株式会社
蓄電装置
9日前
トヨタ自動車株式会社
制御装置
17日前
トヨタ自動車株式会社
処理装置
9日前
トヨタ自動車株式会社
制御装置
9日前
トヨタ自動車株式会社
蓄電装置
9日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ