TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025176047
公報種別
公開特許公報(A)
公開日
2025-12-03
出願番号
2025139588,2023527825
出願日
2025-08-25,2022-06-02
発明の名称
搬送システム及び判定方法
出願人
川崎重工業株式会社
,
カワサキロボティクス(ユーエスエー),インク.
代理人
個人
主分類
H01L
21/677 20060101AFI20251126BHJP(基本的電気素子)
要約
【課題】ウエハの位置ズレに起因してアライナ装置で発生し得る問題を未然に防止可能な搬送システム及び位置ズレを判定する判定方法を提供する。
【解決手段】搬送システムは、ロボットと、センサ(アライナセンサ、突出検出センサ)と、コントローラと、を備える。ロボットは、ウエハを支持してアライナ装置まで搬送するハンドを有する。センサは、ロボットがウエハをアライナ装置に受け渡す前に、ウエハがハンドに支持されている状態で、ウエハの位置を検出する。コントローラは、センサの検出値に基づいてウエハの位置ズレを判定する。
【選択図】図3
特許請求の範囲
【請求項1】
ウエハを搬送する搬送システムにおいて、
前記ウエハを支持してアライナ装置まで搬送するハンドを有するロボットと、
前記ロボットが前記ウエハを前記アライナ装置に受け渡す前に、前記ウエハが前記ハンドに支持されている状態で、前記ウエハの位置を検出するセンサと、
前記センサの検出値に基づいて前記ウエハの位置ズレを判定する判定部と、
を備えることを特徴とする搬送システム。
続きを表示(約 1,400 文字)
【請求項2】
請求項1に記載の搬送システムであって、
前記判定部は、前記センサの検出値に基づいて、前記ウエハの位置ズレが許容値以下か否かを判定し、
前記ウエハの位置ズレが許容値以下であると前記判定部が判定した場合、前記ロボットは、前記アライナ装置への前記ウエハの搬送を続行することを特徴とする搬送システム。
【請求項3】
請求項2に記載の搬送システムであって、
前記ウエハの位置ズレが許容値以下であると前記判定部が判定した場合、前記ロボットは、前記ウエハの搬送の目標位置を前記ウエハの位置ズレに基づいて修正した修正目標位置に、前記ウエハを置くことを特徴とする搬送システム。
【請求項4】
請求項2又は3に記載の搬送システムであって、
前記判定部が前記ウエハの位置ズレが許容値を超えると判定した場合、前記ロボットは、前記アライナ装置への前記ウエハの搬送を中断することを特徴とする搬送システム。
【請求項5】
請求項1から4までの何れか一項に記載の搬送システムであって、
前記センサは、前記アライナ装置が前記ウエハのアライメントを行う際に前記ウエハを検出するアライナセンサであることを特徴とする搬送システム。
【請求項6】
請求項5に記載の搬送システムであって、
前記アライナセンサは、
検査光を照射する投光部と、
前記検査光が前記ウエハで反射した光、又は、前記検査光の一部が前記ウエハで遮られた光を受光して光量に応じた値を出力する受光部と、
を備える光量検出センサであり、
前記ハンドによる前記ウエハの移動中において、前記アライナセンサが前記ウエハを複数回検出することを特徴とする搬送システム。
【請求項7】
請求項5に記載の搬送システムであって、
前記アライナセンサは、前記ウエハのエッジの位置を検出するCCDセンサであることを特徴とする搬送システム。
【請求項8】
請求項1から7までの何れか一項に記載の搬送システムであって、
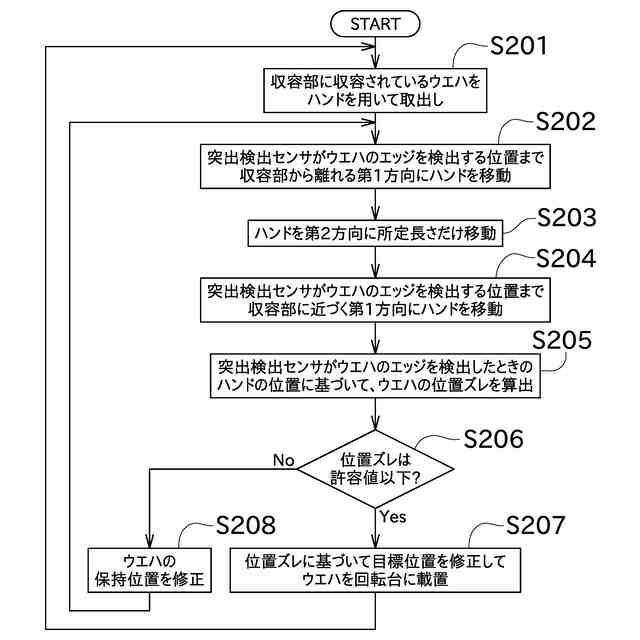
前記ハンドは、収容部に収容された前記ウエハを取り出して、前記ウエハをアライナ装置まで搬送し、
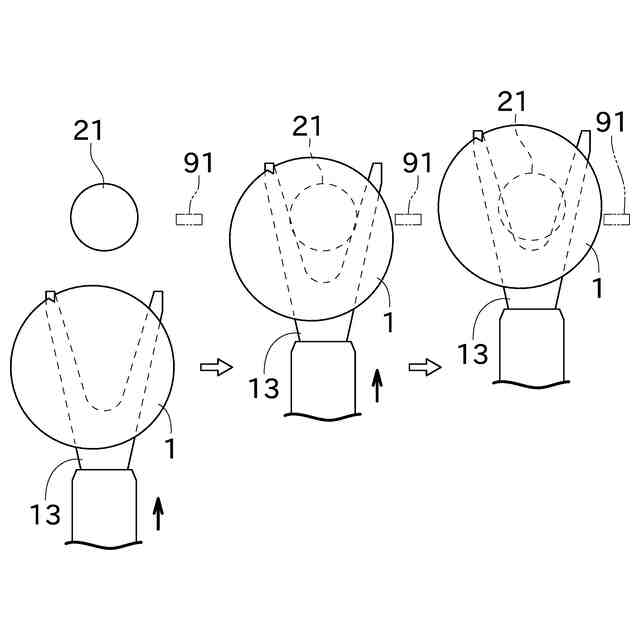
前記センサは、前記収容部の収容空間から前記ウエハが突出しているか否かを検出する突出検出センサであることを特徴とする搬送システム。
【請求項9】
請求項1から5までの何れか一項に記載の搬送システムであって、
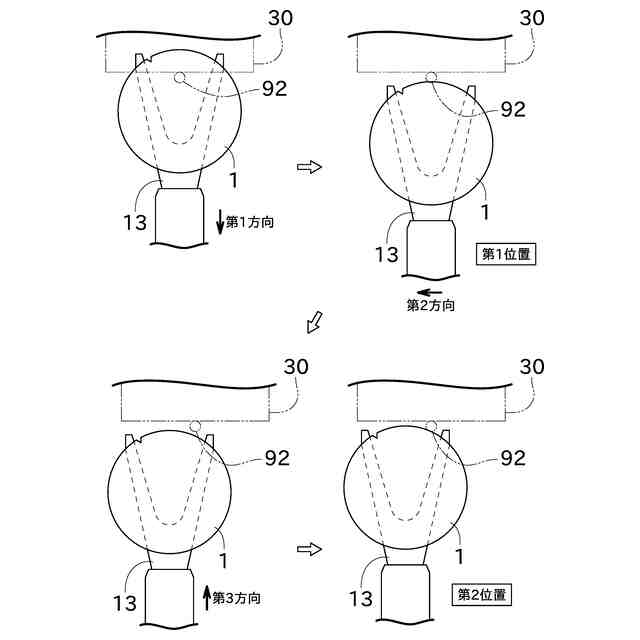
前記センサは、投光部と受光部とを備え、投光部が投光した検査光が受光部が受光したか否かに基づいて、前記投光部と前記受光部の間に前記ウエハが存在するか否かを検出し、
前記判定部は、前記センサが前記ウエハのエッジを検出したときの前記ハンドの位置を複数求め、当該複数の前記ハンドの位置に基づいて、前記ウエハの位置ズレを判定することを特徴とする搬送システム。
【請求項10】
請求項1から9までの何れか一項に記載の搬送システムであって、
前記ハンドは、前記ウエハをハンドに載せてエッジを保持せずに搬送するパッシブグリップ型か、前記ウエハの表面を負圧で吸着して搬送する吸着型であることを特徴とする搬送システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本出願は、主として、ロボットを用いてウエハを搬送する搬送システムに関する。詳細には、ウエハの搬送中にウエハの位置ズレを検出する構成に関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
特許文献1は、基体(ウエハ)を搬送する搬送装置を開示する。特許文献1の搬送装置は、収容容器と、搬送ユニットと、アライメントユニットと、を備える。搬送ユニットは、収容容器に収容された基体を取り出してアライメントユニットまで搬送する。アライメントユニットでは、回転台に基体を載せて回転させて基体の外縁をセンサで検出することで、回転台の中心からどれだけ離れた位置に基体が載せられたかを把握する。
【先行技術文献】
【特許文献】
【0003】
特開2013-211317号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1において、搬送ユニットが基体を取り出した時点で、基体の位置が大きくズレていた場合、基体をアライメントユニットを適切に置くことができなかったり、基体をアライメントユニットに置く際に基体が周囲の部材に衝突したりする可能性がある。あるいは、基体をアライメントユニットに置くことができた場合でも、基体を回転させる作業に失敗したり、基体をセンサで検出できなかったりする可能性がある。
本出願は以上の事情に鑑みてされたものであり、その主要な目的は、ウエハの位置ズレに起因してアライナ装置で発生し得る問題を未然に防止可能な搬送システムを提供することにある。
【課題を解決するための手段】
【0005】
本出願の解決しようとする課題は以上の如くであり、次にこの課題を解決するための手段とその効果を説明する。
【0006】
本出願の第1の観点によれば、以下の構成の搬送システムが提供される。即ち、搬送システムは、ロボットと、センサと、判定部と、を備える。前記ロボットは、前記ウエハを支持してアライナ装置まで搬送するハンドを有する。前記センサは、前記ロボットが前記ウエハを前記アライナ装置に受け渡す前に、前記ウエハが前記ハンドに支持されている状態で、前記ウエハの位置を検出する。前記判定部は、前記センサの検出値に基づいて前記ウエハの位置ズレを判定する。
【0007】
本出願の第2の観点によれば、以下の判定方法が提供される。即ち、判定方法では、ウエハの搬送中に前記ウエハの位置ズレを判定する。ロボットのハンドを用いて前記ウエハを支持してアライナ装置まで搬送する。前記ロボットが前記ウエハを前記アライナ装置に受け渡す前に、前記ウエハが前記ハンドに支持されている状態で、センサを用いて前記ウエハのエッジの位置を検出する。前記センサの検出値に基づいて前記ウエハの位置ズレを判定する。
【0008】
これにより、ウエハをアライナ装置に置く前にウエハの位置ズレを検出するので、ウエハの位置ズレに起因してアライナ装置で発生し得る問題を未然に防止可能である。
【発明の効果】
【0009】
本出願によれば、ウエハの位置ズレに起因してアライナ装置で発生し得る問題を未然に防止可能な搬送システムを提供できる。
【図面の簡単な説明】
【0010】
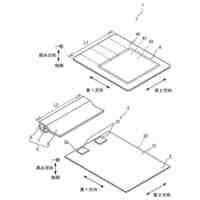
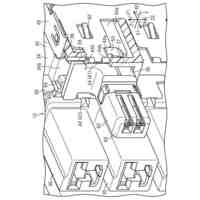
本出願の一実施形態に係る搬送システムの斜視図。
搬送システムのブロック図。
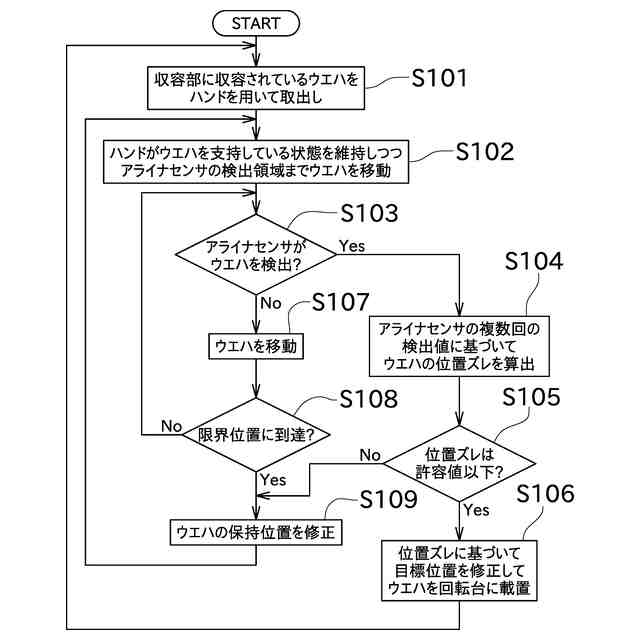
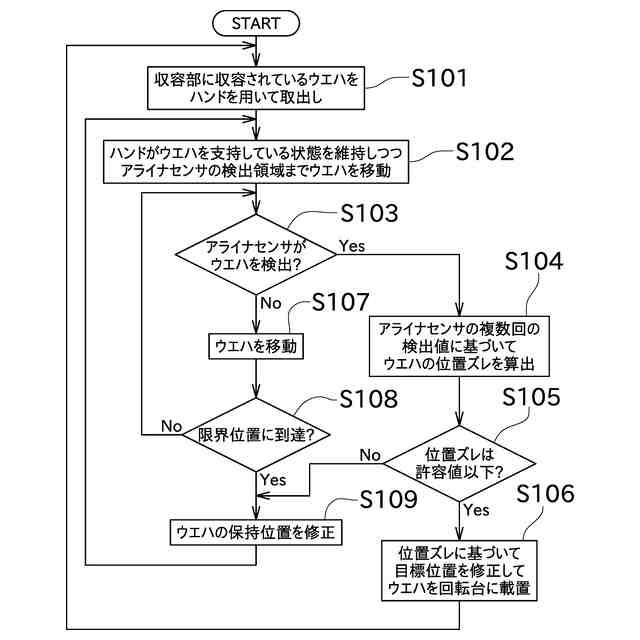
アライナセンサを用いてウエハの位置ズレを判定する処理を示すフローチャート。
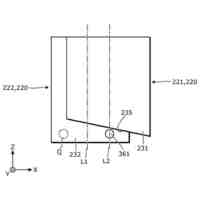
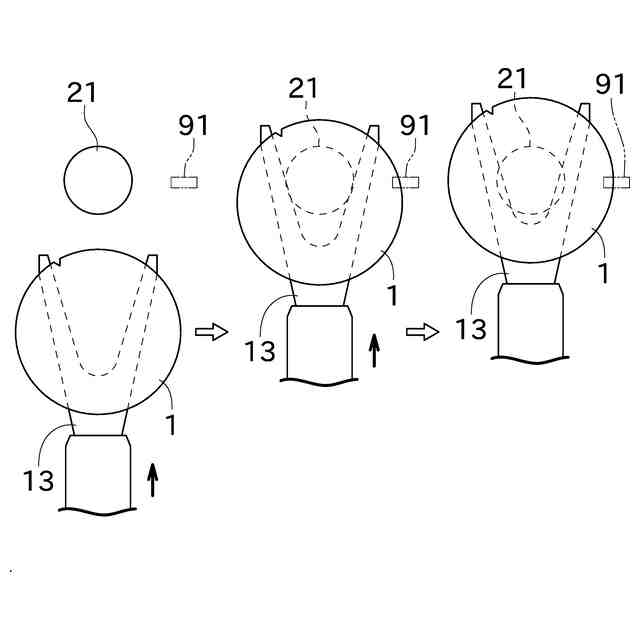
アライナセンサを用いてウエハの位置ズレを判定する状況を示す説明図。
位置ズレに基づいてウエハの目標位置を修正する方法を示す説明図。
ウエハの位置ズレが大きくてアライナセンサで検出されない状況を示す説明図。
突出検出センサを用いてウエハの位置ズレを判定する処理を示すフローチャート。
突出検出センサを用いてウエハの位置ズレを判定する状況を示す説明図。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
東ソー株式会社
絶縁電線
1か月前
APB株式会社
蓄電セル
1か月前
株式会社東芝
端子台
1か月前
マクセル株式会社
電源装置
1か月前
ローム株式会社
半導体装置
1か月前
株式会社GSユアサ
蓄電装置
1か月前
三菱電機株式会社
回路遮断器
22日前
株式会社GSユアサ
蓄電装置
28日前
株式会社ホロン
冷陰極電子源
1か月前
株式会社GSユアサ
蓄電装置
1か月前
株式会社GSユアサ
蓄電装置
14日前
富士電機株式会社
電磁接触器
14日前
日本特殊陶業株式会社
保持装置
1か月前
トヨタ自動車株式会社
蓄電装置
6日前
日新イオン機器株式会社
基板処理装置
1か月前
トヨタ自動車株式会社
バッテリ
1か月前
日本特殊陶業株式会社
保持装置
27日前
ホシデン株式会社
複合コネクタ
8日前
トヨタ自動車株式会社
冷却構造
1か月前
トヨタ自動車株式会社
蓄電装置
1か月前
北道電設株式会社
配電具カバー
1か月前
大電株式会社
電線又はケーブル
6日前
ローム株式会社
半導体装置
1か月前
株式会社トクヤマ
シリコンエッチング液
1か月前
トヨタ自動車株式会社
電池パック
1か月前
矢崎総業株式会社
コネクタ
14日前
株式会社トクヤマ
シリコンエッチング液
1か月前
住友電装株式会社
コネクタ
1か月前
トヨタ自動車株式会社
密閉型電池
1か月前
日亜化学工業株式会社
半導体レーザ素子
1か月前
株式会社デンソー
電子装置
1か月前
ヒロセ電機株式会社
電気コネクタ
14日前
日本無線株式会社
レーダアンテナ
29日前
住友電装株式会社
コネクタ
14日前
甲神電機株式会社
変流器及び零相変流器
29日前
ローム株式会社
半導体モジュール
15日前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ