TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025176006
公報種別
公開特許公報(A)
公開日
2025-12-03
出願番号
2025127643,2024001381
出願日
2025-07-30,2018-06-11
発明の名称
遅延推定方法および遅延推定装置
出願人
華為技術有限公司
,
HUAWEI TECHNOLOGIES CO.,LTD.
代理人
個人
,
個人
主分類
G10L
25/45 20130101AFI20251126BHJP(楽器;音響)
要約
【課題】遅延推定方法および遅延推定装置を開示する。
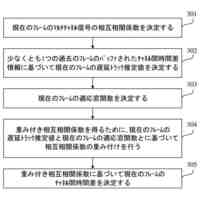
【解決手段】本出願は、遅延推定方法および遅延推定装置を開示し、オーディオ処理分野に属する。本方法は、相互相関係数が過度に平滑化されるか、または不十分に平滑化されるという問題を解決して、チャネル間時間差推定の正確さを高めるように、現在のフレームのマルチチャネル信号の相互相関係数を決定するステップと、少なくとも1つの過去のフレームのバッファされたチャネル間時間差情報に基づいて現在のフレームの遅延トラック推定値を決定するステップと、現在のフレームの適応窓関数を決定するステップと、重み付き相互相関係数を得るために、現在のフレームの遅延トラック推定値と現在のフレームの適応窓関数とに基づいて相互相関係数の重み付けを行うステップと、重み付き相互相関係数に基づいて現在のフレームのチャネル間時間差を決定するステップと、を含む。
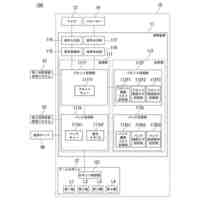
【選択図】図5
特許請求の範囲
【請求項1】
遅延推定方法であって、前記方法が、
現在のフレームのマルチチャネル信号の相互相関係数を決定するステップと、
少なくとも1つの過去のフレームのバッファされたチャネル間時間差情報に基づいて前記現在のフレームの遅延トラック推定値を決定するステップと、
前記現在のフレームの適応窓関数を決定するステップと、
重み付き相互相関係数を得るために、前記現在のフレームの前記遅延トラック推定値と前記現在のフレームの前記適応窓関数とに基づいて前記相互相関係数の重み付けを行うステップと、
前記重み付き相互相関係数に基づいて前記現在のフレームのチャネル間時間差を決定するステップと
を含む、遅延推定方法。
続きを表示(約 3,700 文字)
【請求項2】
前記現在のフレームの適応窓関数を決定する前記ステップが、
前記現在のフレームの前のフレームの平滑化されたチャネル間時間差の推定偏差に基づいて第1の二乗余弦の幅パラメータを計算するステップと、
前記現在のフレームの前記前のフレームの前記平滑化されたチャネル間時間差の推定偏差に基づいて第1の二乗余弦の高さバイアスを計算するステップと、
前記第1の二乗余弦の幅パラメータと前記第1の二乗余弦の高さバイアスとに基づいて前記現在のフレームの前記適応窓関数を決定するステップと
を含む、請求項1に記載の方法。
【請求項3】
前記第1の二乗余弦の幅パラメータが以下の計算式:
win_width1=TRUNC(width_par1*(A*L_NCSHIFT_DS+1))
width_par1=a_width1*smooth_dist_reg+b_width1、式中、
a_width1=(xh_width1-xl_width1)/(yh_dist1-yl_dist1)
b_width1=xh_width1-a_width1*yh_dist1であって、
式中、win_width1が、前記第1の二乗余弦の幅パラメータであり、TRUNCが、値を丸めることを指示し、L_NCSHIFT_DSが、チャネル間時間差の絶対値の最大値であり、Aが、既定の定数であり、Aが、4以上であり、xh_width1が、前記第1の二乗余弦の幅パラメータの上限値であり、xl_width1が、前記第1の二乗余弦の幅パラメータの下限値であり、yh_dist1が、前記第1の二乗余弦の幅パラメータの前記上限値に対応する平滑化されたチャネル間時間差の推定偏差であり、yl_dist1が、前記第1の二乗余弦の幅パラメータの前記下限値に対応する平滑化されたチャネル間時間差の推定偏差であり、smooth_dist_regが、前記現在のフレームの前記前のフレームの前記平滑化されたチャネル間時間差の推定偏差であり、xh_width1、xl_width1、yh_dist1、およびyl_dist1がすべて正の数である、計算式
を使用した計算によって得られる、請求項2に記載の方法。
【請求項4】
width_par1=min(width_par1,xh_width1)、および
width_par1=max(width_par1,xl_width1)であり、
式中、minが、最小値を取ることを表し、maxが、最大値を取ることを表す、請求項3に記載の方法。
【請求項5】
前記第1の二乗余弦の高さバイアスが以下の計算式:
win_bias1=a_bias1*smooth_dist_reg+b_bias1、式中、
a_bias1=(xh_bias1-xl_bias1)/(yh_dist2-yl_dist2)、
b_bias1=xh_bias1-a_bias1*yh_dist2であって、
式中、win_bias1が、前記第1の二乗余弦の高さバイアスであり、xh_bias1が、前記第1の二乗余弦の高さバイアスの上限値であり、xl_bias1が、前記第1の二乗余弦の高さバイアスの下限値であり、yh_dist2が、前記第1の二乗余弦の高さバイアスの前記上限値に対応する平滑化されたチャネル間時間差の推定偏差であり、yl_dist2が、前記第1の二乗余弦の高さバイアスの前記下限値に対応する平滑化されたチャネル間時間差の推定偏差であり、smooth_dist_regが、前記現在のフレームの前記前のフレームの前記平滑化されたチャネル間時間差の推定偏差であり、yh_dist2、yl_dist2、xh_bias1、およびxl_bias1がすべて正の数である、計算式
を使用した計算によって得られる、請求項3または4に記載の方法。
【請求項6】
win_bias1=min(win_bias1,xh_bias1)、および
win_bias1=max(win_bias1,xl_bias1)であり、
式中、minが、最小値を取ることを表し、maxが、最大値を取ることを表す、請求項5に記載の方法。
【請求項7】
yh_dist2=yh_dist1、およびyl_dist2=yl_dist1である、請求項5または6に記載の方法。
【請求項8】
前記適応窓関数が、以下の式:
0≦k≦TRUNC(A*L_NCSHIFT_DS/2)-2*win_width1-1の場合、
loc_weight_win(k)=win_bias1、
TRUNC(A*L_NCSHIFT_DS/2)-2*win_width1≦k≦TRUNC(A*L_NCSHIFT_DS/2)+2*win_width1-1の場合、
loc_weight_win(k)=0.5*(1+win_bias1)+0.5*(1-win_bias1)*cos(π*(k-TRUNC(A*L_NCSHIFT_DS/2))/(2*win_width1))、および
TRUNC(A*L_NCSHIFT_DS/2)+2*win_width1≦k≦A*L_NCSHIFT_DSの場合、
loc_weight_win(k)=win_bias1であって、
式中、loc_weight_win(k)が、前記適応窓関数を表すために使用され、k=0,1,...,A*L_NCSHIFT_DSであり、Aが、前記既定の定数であり、4以上であり、L_NCSHIFT_DSが、前記チャネル間時間差の前記絶対値の前記最大値であり、win_width1が、前記第1の二乗余弦の幅パラメータであり、win_bias1が、前記第1の二乗余弦の高さバイアスである、式
を使用して表される、請求項1から7のいずれか一項に記載の方法。
【請求項9】
前記重み付き相互相関係数に基づいて前記現在のフレームのチャネル間時間差を決定する前記ステップの後に、
前記現在のフレームの前記前のフレームの前記平滑化されたチャネル間時間差の推定偏差と、前記現在のフレームの前記遅延トラック推定値と、前記現在のフレームの前記チャネル間時間差とに基づいて前記現在のフレームの平滑化されたチャネル間時間差の推定偏差を計算するステップ
をさらに含み、
前記現在のフレームの前記平滑化されたチャネル間時間差の推定偏差が以下の計算式:
smooth_dist_reg_update=(1-γ)*smooth_dist_reg+γ*dist_reg’、および
dist_reg’=|reg_prv_corr-cur_itd|であって、
式中、smooth_dist_reg_updateが、前記現在のフレームの前記平滑化されたチャネル間時間差の推定偏差であり、γが、第1の平滑化係数であり、0<γ<1であり、smooth_dist_regが、前記現在のフレームの前記前のフレームの前記平滑化されたチャネル間時間差の推定偏差であり、reg_prv_corrが、前記現在のフレームの前記遅延トラック推定値であり、cur_itdが、前記現在のフレームの前記チャネル間時間差である、計算式
を使用した計算によって得られる、請求項2から8のいずれか一項に記載の方法。
【請求項10】
前記現在のフレームの適応窓関数を決定する前記ステップが、
前記相互相関係数に基づいて前記現在のフレームの前記チャネル間時間差の初期値を決定するステップと、
前記現在のフレームの前記遅延トラック推定値と前記現在のフレームの前記チャネル間時間差の前記初期値とに基づいて前記現在のフレームのチャネル間時間差の推定偏差を計算するステップと、
前記現在のフレームの前記チャネル間時間差の推定偏差に基づいて前記現在のフレームの前記適応窓関数を決定するステップと
を含み、
前記現在のフレームの前記チャネル間時間差の推定偏差が以下の計算式:
dist_reg=|reg_prv_corr-cur_itd_init|であって、
式中、dist_regが、前記現在のフレームの前記チャネル間時間差の推定偏差であり、reg_prv_corrが、前記現在のフレームの前記遅延トラック推定値であり、cur_itd_initが、前記現在のフレームの前記チャネル間時間差の前記初期値である、計算式
を使用した計算によって得られる、請求項1に記載の方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本出願は、参照によりその全体が本明細書に組み入れられる、2017年6月29日付で中国国家知識産権局に出願された、「DELAY ESTIMATION METHOD AND APPARATUS」という名称の中国特許出願第201710515887.1号の優先権を主張するものである。
続きを表示(約 2,500 文字)
【0002】
本出願は、オーディオ処理分野に関し、特に、遅延推定方法および遅延推定装置に関する。
【背景技術】
【0003】
モノラル信号と比較して、指向性と広がりがあるおかげで、マルチチャネル信号(ステレオ信号など)は人々に好まれている。マルチチャネル信号は少なくとも2つのモノラル信号を含む。例えば、ステレオ信号は、2つのモノラル信号、すなわち、左チャネル信号と右チャネル信号とを含む。ステレオ信号を符号化することは、ステレオ信号の左チャネル信号と右チャネル信号とに対して時間領域ダウンミキシング処理を行って2つの信号を取得し、次いで取得された2つの信号を符号化することであり得る。2つの信号はプライマリチャネル信号とセカンダリチャネル信号である。プライマリチャネル信号は、ステレオ信号の2つのモノラル信号間の相関に関する情報を表すために使用される。セカンダリチャネル信号は、ステレオ信号の2つのモノラル信号間の差に関する情報を表すために使用される。
【0004】
2つのモノラル信号間の遅延がより小さいことは、プライマリチャネル信号がより強く、ステレオ信号のコーディング効率がより高く、符号化および復号の品質がより高いことを指示する。これに対して、2つのモノラル信号間の遅延がより大きいことは、セカンダリチャネル信号がより強く、ステレオ信号のコーディング効率がより低く、符号化および復号の品質がより低いことを指示する。符号化および復号によってステレオ信号のより良い効果を得られるようにするために、ステレオ信号の2つのモノラル信号間の遅延、すなわち、チャネル間時間差(ITD、Inter-channel Time Difference)が推定される必要がある。2つのモノラル信号は、推定チャネル間時間差に基づいて行われる遅延整合処理を行うことによって整合され、これによりプライマリチャネル信号が強化される。
【0005】
典型的な時間領域遅延推定方法は、平滑化された相互相関係数を得るために、少なくとも1つの過去のフレームの相互相関係数に基づいて現在のフレームのステレオ信号の相互相関係数に対して平滑化処理を行うステップと、最大値を求めて平滑化された相互相関係数を探索するステップと、最大値に対応するインデックス値を現在のフレームのチャネル間時間差として決定するステップと、を含む。現在のフレームの平滑化係数が、入力信号のエネルギーまたは別の特徴に基づく適応調整によって得られた値である。相互相関係数は、異なるチャネル間時間差に対応する遅延が調整された後の2つのモノラル信号間の相互相関の度合いを指示するために使用される。相互相関係数は相互相関関数とも呼ばれ得る。
【0006】
現在のフレームのすべての相互相関値を平滑化するために、オーディオコーディング装置に均一な標準(現在のフレームの平滑化係数)が使用される。これにより、ある相互相関値が過度に平滑化され、かつ/または別のある相互相関値が不十分に平滑化される可能性がある。
【発明の概要】
【0007】
オーディオコーディング装置によって現在のフレームの相互相関係数の相互相関値に対して行われた過度な平滑化または不十分な平滑化が原因でオーディオコーディング装置によって推定されたチャネル間時間差が不正確になるという問題を解決するために、本出願の実施形態は、遅延推定方法および遅延推定装置を提供する。
【課題を解決するための手段】
【0008】
第1の態様によれば、遅延推定方法が提供される。本方法は、現在のフレームのマルチチャネル信号の相互相関係数を決定するステップと、少なくとも1つの過去のフレームのバッファされたチャネル間時間差情報に基づいて現在のフレームの遅延トラック推定値を決定するステップと、現在のフレームの適応窓関数を決定するステップと、重み付き相互相関係数を得るために、現在のフレームの遅延トラック推定値と現在のフレームの適応窓関数とに基づいて相互相関係数の重み付けを行うステップと、重み付き相互相関係数に基づいて現在のフレームのチャネル間時間差を決定するステップと、を含む。
【0009】
現在のフレームのチャネル間時間差は、現在のフレームの遅延トラック推定値を計算することによって予測され、現在のフレームの遅延トラック推定値と現在のフレームの適応窓関数とに基づいて相互相関係数に対して重み付けが行われる。適応窓関数は、二乗余弦のような窓であり、中間部分を相対的に拡大し、境界部分を抑制する機能を有する。したがって、現在のフレームの遅延トラック推定値と現在のフレームの適応窓関数とに基づいて相互相関係数に対して重み付けが行われるとき、インデックス値が遅延トラック推定値により近い場合、重み係数はより大きく、第1の相互相関係数が過度に平滑化されるという問題が回避され、インデックス値が遅延トラック推定値からより遠い場合、重み係数はより小さく、第2の相互相関係数が不十分に平滑化されるという問題が回避される。このようにして、適応窓関数は、相互相関係数における、遅延トラック推定値から離れたインデックス値に対応する相互相関値を適応的に抑制し、それによって、重み付き相互相関係数におけるチャネル間時間差決定の正確さが高まる。第1の相互相関係数は、相互相関係数における、遅延トラック推定値に近いインデックス値に対応する相互相関値であり、第2の相互相関係数は、相互相関係数における、遅延トラック推定値から離れたインデックス値に対応する相互相関値である。
【0010】
第1の態様に関連して、第1の態様の第1の実施態様において、現在のフレームの適応窓関数を決定するステップは、第(n-k)のフレームの平滑化されたチャネル間時間差の推定偏差に基づいて現在のフレームの適応窓関数を決定するステップであって、0<k<nであり、現在のフレームが第nのフレームである、ステップ、を含む。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
華為技術有限公司
通信方法、機器、及びシステム
20日前
華為技術有限公司
遅延推定方法および遅延推定装置
5日前
華為技術有限公司
エンコーダ、デコーダ、および、対応する方法
12日前
華為技術有限公司
センシング・セッション確立方法および通信装置
20日前
華為技術有限公司
マルチリンク通信プローブ要求の方法および装置
26日前
華為技術有限公司
マルチチャネル信号の符号化方法およびエンコーダ
20日前
華為技術有限公司
チャネル間位相差パラメータ符号化方法および装置
1か月前
華為技術有限公司
協調マルチアクセスポイントAP伝送のための方法および関連装置
3日前
華為技術有限公司
サブピクチャベースのビデオコーディングにおけるサブピクチャごとの1つのスライスの指示
26日前
華為技術有限公司
ハイブリッド自動再送要求確認HARQ-ACKコードブックを決定するための方法および装置
12日前
個人
遮音材
1か月前
個人
ギター
3日前
個人
管楽器用リガチャ-
1か月前
個人
歌唱補助器具
1か月前
個人
音声出力装置
1か月前
横浜ゴム株式会社
音響材
24日前
三井化学株式会社
防音構造体
4日前
三井化学株式会社
防音構造体
4日前
大和ハウス工業株式会社
音低減設備
1か月前
DIC株式会社
吸音材及び吸音部品
1か月前
個人
管楽器用音質改善留め具
18日前
NOK株式会社
吸音構造体
1か月前
株式会社SinasSP
自動騒音低減装置
1か月前
矢崎総業株式会社
車両用対話システム
1か月前
横浜ゴム株式会社
多層空洞音響材
1か月前
株式会社デンソー
音低減装置
3日前
株式会社第一興商
カラオケ装置
1か月前
三井化学株式会社
防音構造体および自動車の防音構造
4日前
ヤマハ株式会社
鍵盤装置
11日前
有限会社ツバサ
エレキギターおよび保護フィルム付きの樹脂プレート
1か月前
ヤマハ株式会社
音処理装置及び音処理方法
18日前
有限会社 宮脇工房
モーター挙動音発生装置
1か月前
株式会社デンソー
制御装置、制御方法、及び制御プログラム
24日前
株式会社SUBARU
乗物用遮音構造体、及び車両
1か月前
株式会社第一興商
カラオケ装置、カラオケシステム
3日前
株式会社第一興商
カラオケ装置、カラオケシステム
10日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ