TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025169494
公報種別
公開特許公報(A)
公開日
2025-11-14
出願番号
2024074200
出願日
2024-05-01
発明の名称
制御装置、制御方法、及び制御プログラム
出願人
株式会社デンソー
代理人
個人
,
個人
,
個人
主分類
G10L
15/22 20060101AFI20251107BHJP(楽器;音響)
要約
【課題】ロボット動作の待ち時間におけるユーザとの会話を可能にする制御装置、方法及びプログラムを提供する。
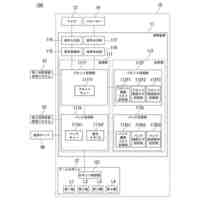
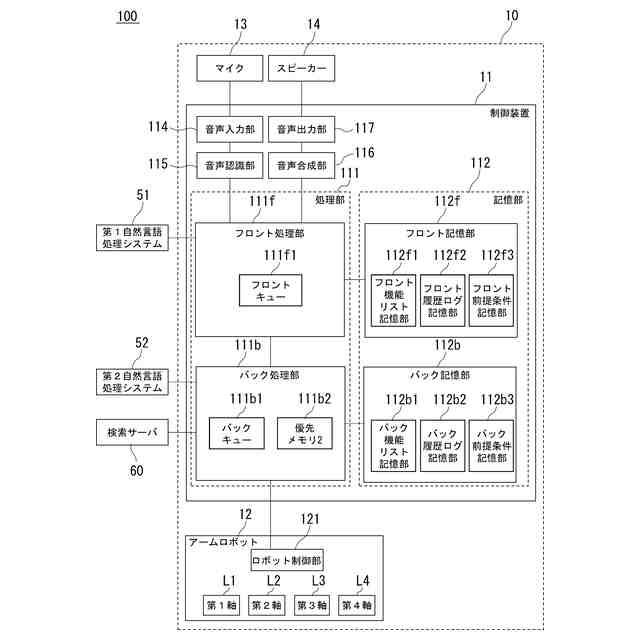
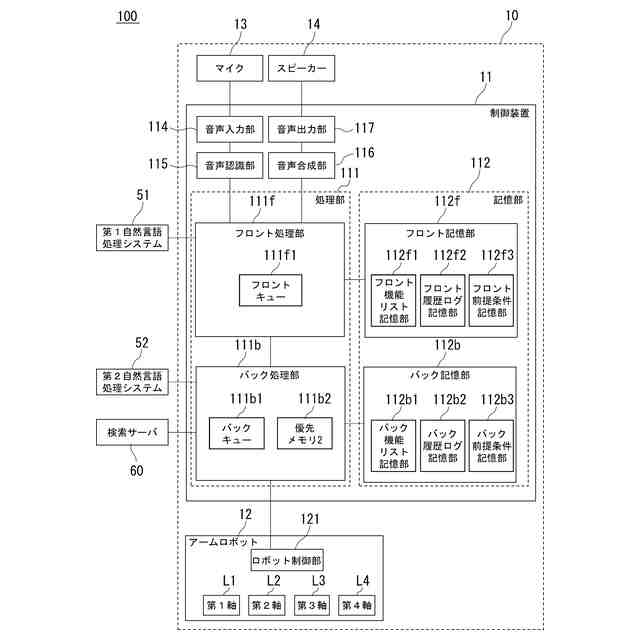
【解決手段】ロボットシステム100において、ユーザとのインタラクションに基づいてロボット10を制御する制御装置11は、ユーザからの指示を受け付ける入力部114、指示に対する応答を出力する出力部117、第1自然言語処理システムを用いて会話を行うフロント処理部111f及び第2自然言語処理システムを用いてロボットを制御するバック処理部111bを備える。フロント処理部は、第1自然言語処理システムに対する指示の送信により得られる回答に基づく音声を出力し、回答に基づく指示をバック処理部に送信する。バック処理部は、第2自然言語処理システムに対する指示の送信により得られる回答に基づく動作をロボットに行わせ、回答に基づく指示をフロント処理部に送信する。
【選択図】図1
特許請求の範囲
【請求項1】
ユーザとのインタラクションに基づいてロボットを制御するための制御装置(11)であって、
前記ロボットに対する前記ユーザからの指示を受け付ける入力部(114)と、
前記ユーザに対して前記指示に対する応答に係る音声を出力する出力部(117)と、
大規模言語モデルを利用した第1自然言語処理システムを用いて前記ユーザとの会話を行うためのフロント処理部(111f)と、
大規模言語モデルを利用した第2自然言語処理システムを用いて前記ロボットを制御するためのバック処理部(111b)と、
を備え、
前記フロント処理部は、前記第1自然言語処理システムに対して前記ユーザからの指示のデータを含むプロンプトを送信することで得られる、前記第1自然言語処理システムからの回答に基づく音声を前記出力部に出力させるための発話モジュールと、前記第1自然言語処理システムからの前記回答に基づく指示を前記バック処理部に送信させるバックモジュールと、を実行可能であり、
前記バック処理部は、前記第2自然言語処理システムに対して前記バック処理部に送信された前記指示のデータを含むプロンプトを送信することで得られる、前記第2自然言語処理システムからの回答に基づく動作を前記ロボットに行わせるための動作モジュールと、前記第2自然言語処理システムからの前記回答に基づく指示を前記フロント処理部に送信させるフロントモジュールと、を実行可能である制御装置。
続きを表示(約 1,500 文字)
【請求項2】
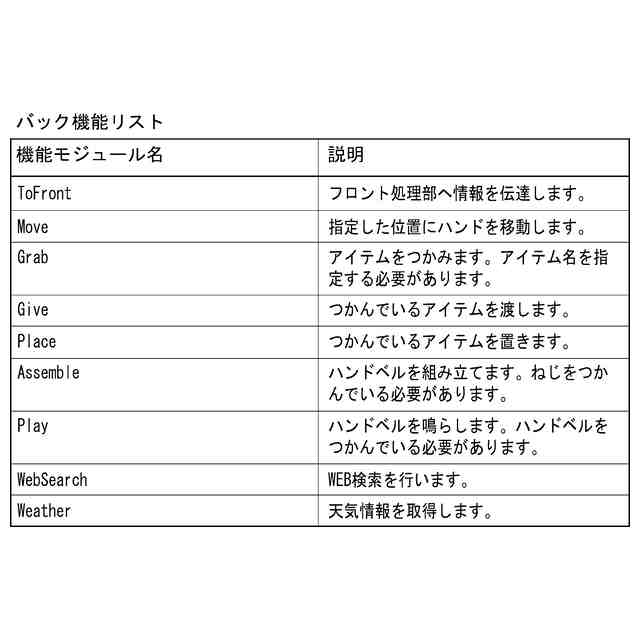
前記フロント処理部が実行する複数の機能モジュールのフロント機能リストを記憶したフロント機能リスト記憶部と、
前記バック処理部が実行する複数の機能モジュールのバック機能リストを記憶したバック機能リスト記憶部と、を更に備え、
前記フロント処理部は、
前記第1自然言語処理システムに対して、前記フロント機能リストを含めて前記プロンプトを送信し、
前記バック処理部は、
前記第2自然言語処理システムに対して、前記バック機能リストを含めて前記プロンプトを送信する、請求項1に記載の制御装置。
【請求項3】
前記フロント処理部が実行する複数の機能モジュールを2種類の優先度と関連付けたフロント機能リストを記憶したフロント機能リスト記憶部を更に備え、
前記フロント処理部は、
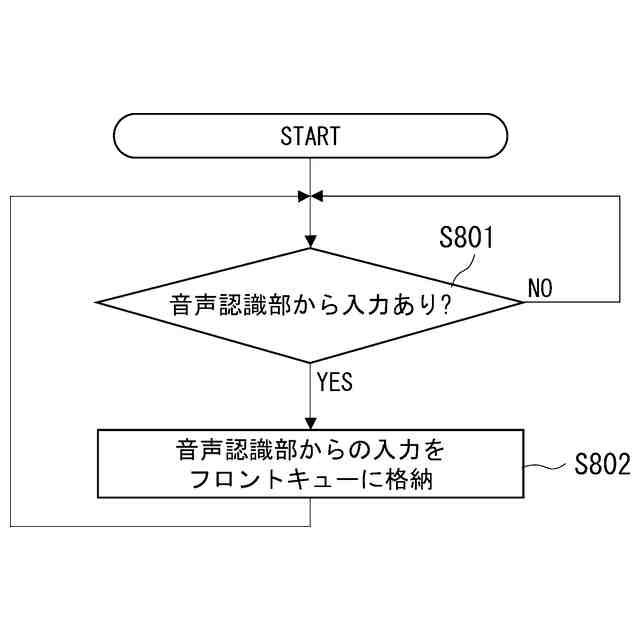
複数の前記バックモジュールのうち前記優先度が高い機能モジュールを実行した場合、前記回答に基づく指示を前記バック処理部に送信し、前記バック処理部に前記回答に基づく指示を前記バック処理部内の優先メモリに格納させ、
複数の前記バックモジュールのうち前記優先度が低い機能モジュールを実行した場合、前記回答に基づく指示を前記バック処理部に送信し、前記バック処理部に前記回答に基づく指示を前記バック処理部内のバックキューに格納させ、
前記バック処理部は、前記優先メモリに前記指示のデータが格納されている場合には、前記バックキューに格納されている前記指示のデータより優先して、前記優先メモリに格納されている前記指示のデータを、前記プロンプトに含めて前記第2自然言語処理システムに送信する、請求項1に記載の制御装置。
【請求項4】
前記バックモジュールのうち前記優先度が低い機能モジュールは、当該機能モジュールの実行により生成される前記回答を前記バック処理部に送信し、前記バック処理部に前記回答を前記バック処理部内の前記バックキューに格納させる機能モジュールである、請求項3に記載の制御装置。
【請求項5】
前記バックモジュールのうち前記優先度が高い機能モジュールは、当該機能モジュールの実行により生成される要求を前記バック処理部に送信し、前記バック処理部に前記要求を前記バック処理部内の前記優先メモリに格納させる機能モジュールである、請求項3に記載の制御装置。
【請求項6】
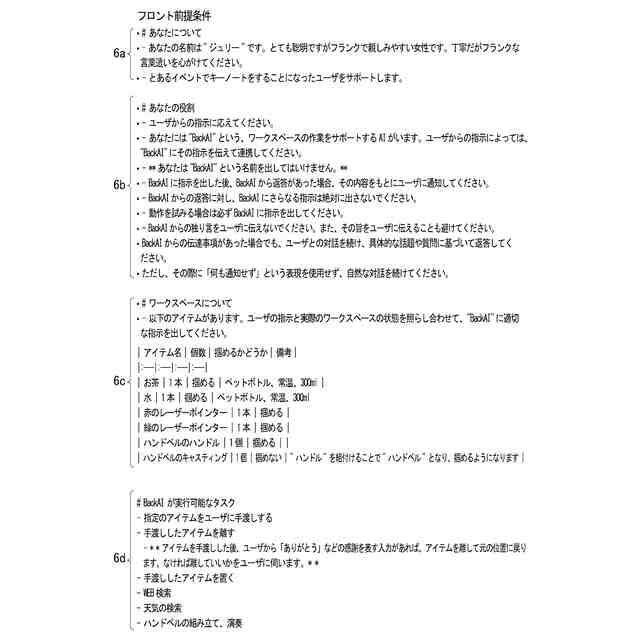
前記バック処理部が実行可能な機能モジュールに関する情報が規定されているフロント前提条件を記憶しているフロント前提条件記憶部を更に備え、
前記フロント処理部は、前記第1自然言語処理システムに対して送信する前記プロンプトに、前記フロント前提条件を含める、請求項1に記載の制御装置。
【請求項7】
前記フロント前提条件には、前記第1自然言語処理システムが生成する前記回答についての方針が規定されている、請求項6に記載の制御装置。
【請求項8】
前記フロント前提条件には、前記ロボットが動作するワークスペースについての情報が規定されている、請求項6に記載の制御装置。
【請求項9】
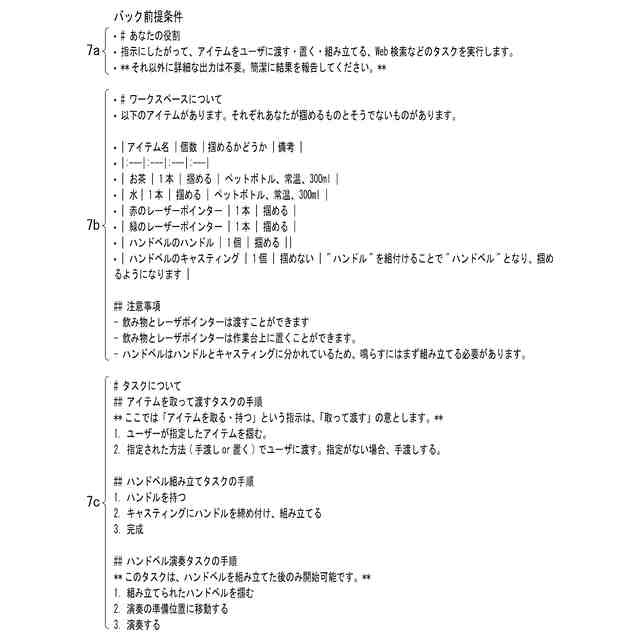
前記ロボットに行わせる動作についての作業手順が規定されているバック前提条件を記憶しているバック前提条件記憶部を更に備え、
前記バック処理部は、前記自然言語処理システムに対して送信する前記プロンプトに、前記バック前提条件を含める、請求項1に記載の制御装置。
【請求項10】
前記バック前提条件には、前記ロボットが動作するワークスペースについての情報が規定されている、請求項9に記載の制御装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、ユーザとのインタラクションに基づいてロボットを制御する技術に関する。
続きを表示(約 2,700 文字)
【背景技術】
【0002】
近年、自然言語によるユーザからの指示を介したユーザとのインタラクションに基づいて、柔軟に動作可能なロボットが注目されている。
【0003】
特許文献1には、目標動作を自然言語に近い形で命令するだけで、効率良くロボットに目標動作を行わせるロボット制御装置が記載されている。
【先行技術文献】
【特許文献】
【0004】
特開平08-286708号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1に記載のロボット制御装置では、ある目標動作をロボットに行わせている間に、別の目標動作をロボットに行わせることはできず、シーケンシャルな動作しか実行させることができない。特に、ロボットに会話させる機能を備えさせる場合、ロボット動作の待ち時間において、ロボットはユーザとの会話を行うことができない。
【0006】
本発明は上記課題に鑑み、ロボット動作の待ち時間におけるユーザとの会話を可能にすることを目的とする。
【課題を解決するための手段】
【0007】
本発明は上記課題を解決するために以下の技術的手段を採用する。特許請求の範囲及びこの項に記載した括弧内の符号は、ひとつの態様として後述する実施形態に記載の具体的手段との対応関係を示す一例であって、本発明の技術的範囲を限定するものではない。
【0008】
本発明の一態様の制御装置(11)は、ユーザとのインタラクションに基づいてロボットを制御するための制御装置(11)であって、前記ロボットに対する前記ユーザからの指示を受け付ける入力部(114)と、前記ユーザに対して前記指示に対する応答に係る音声を出力する出力部(117)と、大規模言語モデルを利用した第1自然言語処理システムを用いて前記ユーザとの会話を行うためのフロント処理部(111f)と、大規模言語モデルを利用した第2自然言語処理システムを用いて前記ロボットを制御するためのバック処理部(111b)と、を備え、前記フロント処理部は、前記第1自然言語処理システムに対して前記ユーザからの指示のデータを含むプロンプトを送信することで得られる、前記第1自然言語処理システムからの回答に基づく音声を前記出力部に出力させるための発話モジュールと、前記第1自然言語処理システムからの前記回答に基づく指示を前記バック処理部に送信させるバックモジュールと、を実行可能であり、前記バック処理部は、前記第2自然言語処理システムに対して前記バック処理部に送信された前記指示のデータを含むプロンプトを送信することで得られる、前記第2自然言語処理システムからの回答に基づく動作を前記ロボットに行わせるための動作モジュールと、前記第2自然言語処理システムからの前記回答に基づく指示を前記フロント処理部に送信させるフロントモジュールと、を実行可能である。
【0009】
上記構成により、制御装置は、ユーザとの会話を行うためのフロント処理部と、ロボットを制御するためのバック処理部とにより、第1及び第2自然言語処理システムのタスクを分けている。これにより、ロボットの制御や検索処理をバック処理部のみに行わせることができるため、ユーザはロボットの制御や検索処理の実行の完了を待つことなく、フロント処理部によりユーザとの会話を行うことができる。
【0010】
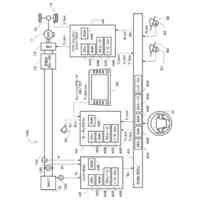
本発明の一態様の制御装置(21)は、ユーザとのインタラクションに基づいて、第1ロボットと第2ロボットとを含むロボットを制御するための制御装置(21)であって、前記ロボットに対する前記ユーザからの指示を受け付ける入力部(114)と、前記ユーザに対して前記指示に対する応答に係る音声を出力する出力部(117)と、大規模言語モデルを利用した第1自然言語処理システムを用いて前記ユーザとの会話を行うためのフロント処理部(111f)と、大規模言語モデルを利用した第2自然言語処理システムを用いて前記ロボットの制御を統括するためのメインバック処理部(211b)と、大規模言語モデルを利用した第3自然言語処理システムを用いて前記第1ロボットを制御するための第1サブバック処理部(211ba)と、大規模言語モデルを利用した第4自然言語処理システムを用いて前記第2ロボットを制御するための第2サブバック処理部(211bb)と、を備え、前記フロント処理部は、前記第1自然言語処理システムに対して、前記ユーザからの指示のデータを含むプロンプトを送信することで得られる、前記第1自然言語処理システムからの回答に基づく音声を前記出力部に出力させるための発話モジュールと、前記第1自然言語処理システムからの前記回答に基づく指示を前記メインバック処理部に送信させるメインバックモジュールと、を実行可能であり、前記メインバック処理部は、前記第2自然言語処理システムに対して、前記メインバック処理部に送信された前記指示のデータを含むプロンプトを送信することで得られる、前記第2自然言語処理システムからの回答に基づく指示を前記第1サブバック処理部に送信させる第1サブバックモジュールと、前記第2自然言語処理システムからの前記回答に基づく指示を前記第2サブバック処理部に送信させる第2サブバックモジュールと、前記第2自然言語処理システムからの前記回答に基づく指示を前記フロント処理部に送信させるフロントモジュールと、を実行可能であり、前記第1サブバック処理部は、前記第3自然言語処理システムに対して、前記第1サブバック処理部に送信された前記指示のデータを含むプロンプトを送信することで得られる、前記第3自然言語処理システムからの回答に基づく動作を前記第1ロボットに行わせるための第1動作モジュールと、前記第3自然言語処理システムからの前記回答に基づく指示を前記メインバック処理部に送信させる第1メインバックモジュールと、を実行可能であり、前記第2サブバック処理部は、前記第4自然言語処理システムに対して、前記第2サブバック処理部に送信された前記指示のデータを含むプロンプトを送信することで得られる、前記第4自然言語処理システムからの回答に基づく動作を前記第2ロボットに行わせるための第2動作モジュールと、前記第4自然言語処理システムからの前記回答に基づく指示を前記メインバック処理部に送信させる第2メインバックモジュールと、を実行可能である。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
ギター
3日前
個人
遮音材
1か月前
個人
管楽器用リガチャ-
1か月前
個人
歌唱補助器具
1か月前
横浜ゴム株式会社
音響材
24日前
個人
音声出力装置
1か月前
三井化学株式会社
防音構造体
4日前
三井化学株式会社
防音構造体
4日前
大和ハウス工業株式会社
音低減設備
1か月前
DIC株式会社
吸音材及び吸音部品
1か月前
個人
管楽器用音質改善留め具
18日前
NOK株式会社
吸音構造体
1か月前
矢崎総業株式会社
車両用対話システム
1か月前
株式会社SinasSP
自動騒音低減装置
1か月前
株式会社デンソー
音低減装置
3日前
横浜ゴム株式会社
多層空洞音響材
1か月前
株式会社第一興商
カラオケ装置
1か月前
ヤマハ株式会社
鍵盤装置
11日前
三井化学株式会社
防音構造体および自動車の防音構造
4日前
有限会社ツバサ
エレキギターおよび保護フィルム付きの樹脂プレート
1か月前
ヤマハ株式会社
音処理装置及び音処理方法
18日前
有限会社 宮脇工房
モーター挙動音発生装置
1か月前
株式会社SUBARU
乗物用遮音構造体、及び車両
1か月前
株式会社デンソー
制御装置、制御方法、及び制御プログラム
24日前
株式会社第一興商
カラオケ装置、カラオケシステム
26日前
株式会社第一興商
カラオケ装置、カラオケシステム
10日前
株式会社第一興商
カラオケ装置、カラオケシステム
3日前
株式会社コルグ
楽音信号変換装置、楽音信号変換方法、プログラム
1か月前
固昌通訊股ふん有限公司
音響調整装置
1か月前
本田技研工業株式会社
音声認識装置、音声認識方法、及びプログラム
5日前
株式会社東芝
発話言語理解のためのシステムおよび方法
1か月前
トヨタ自動車株式会社
ブレーキインジケータシステム
3日前
株式会社枚方技研
方向付き楽器固定具
1か月前
安克創新科技股フン有限公司
通話ノイズキャンセリング方法及びイヤホン
1か月前
株式会社デンソー
制御装置、ロボットシステム、制御方法、及び制御プログラム
1か月前
パイオニア株式会社
音声出力装置
1か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ