TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025174855
公報種別
公開特許公報(A)
公開日
2025-11-28
出願番号
2025033406
出願日
2025-03-04
発明の名称
車両の走行を制御する方法と装置及び車両
出願人
三星電子株式会社
,
Samsung Electronics Co.,Ltd.
代理人
弁理士法人ITOH
主分類
G01C
21/32 20060101AFI20251120BHJP(測定;試験)
要約
【課題】車両の走行を制御する方法と装置及び車両が開示される。
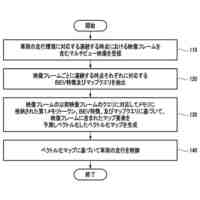
【解決手段】一実施形態に係る車両の走行を制御する方法は、車両の走行環境に対応する連続する時点における映像フレームを含むマルチビュー映像を受信し、映像フレームごとに連続する時点それぞれに対応するBEV特徴及びマップクエリを抽出し、映像フレームの以前映像フレームのクエリに対応してメモリに格納された第1メモリトークン、BEV特徴及びマップクエリに基づいて、映像フレームに含まれたマップ要素を予測してベクトル化したベクトル化マップを生成し、ベクトル化マップに基づいて車両の走行を制御する。
【選択図】図1
特許請求の範囲
【請求項1】
車両の走行環境に対応する連続する時点における映像フレームを含むマルチビュー映像を受信するステップと、
前記映像フレームごとに前記連続する時点それぞれに対応するBEV特徴及びマップクエリを抽出するステップと、
前記映像フレームの以前映像フレームのクエリに対応してメモリに格納された第1メモリトークン、前記BEV特徴及び前記マップクエリに基づいて、前記映像フレームに含まれたマップ要素を予測してベクトル化したベクトル化マップを生成するステップと、
前記ベクトル化マップに基づいて前記車両の走行を制御するステップと、
を含む、車両の走行を制御する方法。
続きを表示(約 2,000 文字)
【請求項2】
前記BEV特徴及びマップクエリを抽出するステップは、
バックボーンネットワークを用いて前記映像フレームに対応する透視図(perspective:PV)の映像特徴を抽出するステップと、
前記透視図(PV)の映像特徴を前記BEV特徴に変換するステップと、
前記BEV特徴及び前記映像フレームに対応するクエリに基づいて、前記ベクトル化マップを構成するために使用されるフレームレベルの前記マップクエリを抽出するステップと、
前記BEV特徴と前記マップクエリを出力するステップと、
を含む、請求項1に記載の車両の走行を制御する方法。
【請求項3】
前記ベクトル化マップを生成するステップは、
前記第1メモリトークンを判読するステップと、
前記マップクエリ、前記BEV特徴、及び前記第1メモリトークンに基づいて、前記ベクトル化マップを構成する前記マップ要素を含むマップトークン、及び前記映像フレームに対応するベクトル化された特徴を含むクリップトークンの少なくとも1つを生成するステップと、
前記マップトークンに基づいて、前記ベクトル化マップを生成するステップと、
を含む、請求項1に記載の車両の走行を制御する方法。
【請求項4】
前記マップトークン及び前記クリップトークンのうち少なくとも1つを生成するステップは、
前記マップクエリ及び前記第1メモリトークンから前記映像フレームに対応する特徴空間で前記マップ要素に対する手がかりを含む前記クリップトークンを生成するステップと、
前記BEV特徴が隠されたマップ要素を含むよう前記クリップトークンを用いて前記BEV特徴をアップデートするステップと、
前記アップデートされたBEV特徴及び前記マップクエリを用いて前記マップトークンを生成するステップと、
を含む、請求項3に記載の車両の走行を制御する方法。
【請求項5】
前記マップクエリの大きさは、前記クリップトークンの大きさ、前記マップ要素の個数、及び前記マップ要素ごとのポイントの個数のうち少なくとも1つに基づいて決定される、請求項3に記載の車両の走行を制御する方法。
【請求項6】
前記BEV特徴をアップデートするステップは、
前記BEV特徴からクエリを抽出するステップと、
前記クリップトークンからキー及びバリューを抽出するステップと、
前記クエリ、前記キー、及び前記バリューを用いて交差アテンションネットワーク及びフィードフォワードネットワークを介して前記BEV特徴をアップデートするステップと、
を含む、請求項4に記載の車両の走行を制御する方法。
【請求項7】
前記マップトークンを生成するステップは、変形可能なアテンションネットワーク、分離されたセルフアテンションネットワーク、及びフィードフォワードネットワークを用いて、前記マップクエリ及び前記アップデートされたBEV特徴から前記マップトークンを生成するステップを含む、請求項4に記載の車両の走行を制御する方法。
【請求項8】
前記マップトークンを生成するステップは、前記変形可能なアテンションネットワークを用いて前記マップクエリから前記クエリを抽出し、前記アップデートされたBEV特徴から値を取得することで前記マップトークンを生成するステップを含む、請求項7に記載の車両の走行を制御する方法。
【請求項9】
前記ベクトル化マップを生成するステップは、予め学習された神経網によって前記映像フレームに含まれた前記マップ要素を予測し、インスタンスごとにベクトル化した前記ベクトル化マップを生成するステップを含み、
前記予め学習された神経網は、
前記メモリで前記第1メモリトークンを判読するか、前記メモリに第2メモリトークンを記録する第2-1神経網と、
前記マップクエリ、前記BEV特徴、及び前記第1メモリトークンに基づいて、前記映像フレームのうち現在フレームに対応する前記ベクトル化マップを生成する第2-2神経網と、
のうち少なくとも1つを含む、請求項3に記載の車両の走行を制御する方法。
【請求項10】
前記ベクトル化マップを生成するステップは、
前記第2-1神経網によって、前記メモリに前記マップトークンを記録するステップと、
前記マップトークンのうち、現在フレームに対応するマップトークンが予測ヘッドを通過することにより前記ベクトル化マップを生成するステップと、
を含む、請求項9に記載の車両の走行を制御する方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【背景技術】
【0001】
以下の実施形態は、車両の走行を制御する方法と装置及び車両に関する。
続きを表示(約 1,800 文字)
【技術分野】
【0002】
神経網(ニューラルネットワーク)が発展することにより、様々な分野の電子装置が神経網に基づいたモデルによって入力データを分析し、有効情報を抽出及び/又は生成することができる。例えば、神経網を用いて道路の幾何学的な情報(例えば、車線、道路標識)を予測して高画質マップを構成することは、安全な自律走行のための重要な作業である。高画質マップを構成する静的マップ要素は、例えば、車線維持、経路計画、軌道予測のようなアプリケーションを含む自律走行車両に重要な情報である。しかし、静的マップ要素は、道路上の様々な動的オブジェクトによって繰り返し遮られることがある。
【発明の概要】
【発明が解決しようとする課題】
【0003】
本発明の課題は、車両の走行を制御する方法と装置及び車両を提供することにある。
【課題を解決するための手段】
【0004】
一実施形態によれば、車両の走行を制御する方法は、車両の走行環境に対応する連続する時点における映像フレームを含むマルチビュー映像を受信するステップと、前記映像フレームごとに前記連続する時点それぞれに対応するBEV特徴及びマップクエリを抽出するステップと、前記映像フレームの以前映像フレームのクエリに対応してメモリに格納された第1メモリトークン、前記BEV特徴及び前記マップクエリに基づいて、前記映像フレームに含まれたマップ要素を予測してベクトル化したベクトル化マップを生成するステップと、前記ベクトル化マップに基づいて前記車両の走行を制御するステップとを含む。
【0005】
前記BEV特徴及びマップクエリを抽出するステップは、バックボーンネットワークを用いて前記映像フレームに対応する透視図(perspective:PV)の映像特徴を抽出するステップと、前記透視図(PV)の映像特徴を前記BEV特徴に変換するステップと、前記BEV特徴及び前記映像フレームに対応するクエリに基づいて、前記ベクトル化マップを構成するために使用されるフレームレベルの前記マップクエリを抽出するステップと、前記BEV特徴と前記マップクエリを出力するステップとを含むことができる。
【0006】
前記ベクトル化マップを生成するステップは、前記第1メモリトークンを判読するステップと、前記マップクエリ、前記BEV特徴、及び前記第1メモリトークンに基づいて、前記ベクトル化マップを構成する前記マップ要素を含むマップトークン、及び前記画像フレームに対応するベクトル化された特徴を含むクリップトークンの少なくとも1つを生成するステップと、前記マップトークンに基づいて、前記ベクトル化マップを生成するステップとを含むことができる。
【0007】
前記マップトークン及び前記クリップトークンのうち少なくとも1つを生成するステップは、前記マップクエリ及び前記第1メモリトークンから前記映像フレームに対応する特徴空間で前記マップ要素に対する手がかりを含む前記クリップトークンを生成するステップと、前記BEV特徴が隠されたマップ要素を含むよう前記クリップトークンを用いて前記BEV特徴をアップデートするステップと、前記アップデートされたBEV特徴及び前記マップクエリを用いて前記マップトークンを生成するステップとを含むことができる。
【0008】
前記マップクエリの大きさは、前記クリップトークンの大きさ、前記マップ要素の個数、及び前記マップ要素ごとのポイントの個数のうち少なくとも1つに基づいて決定されることができる。
【0009】
前記BEV特徴をアップデートするステップは、前記BEV特徴からクエリを抽出するステップと、前記クリップトークンからキー及びバリューを抽出するステップと、前記クエリ、前記キー、及び前記バリューを用いて交差アテンションネットワーク及びフィードフォワードネットワークを介して前記BEV特徴をアップデートするステップとを含むことができる。
【0010】
前記マップトークンを生成するステップは、変形可能なアテンションネットワーク、分離されたセルフアテンションネットワーク、及びフィードフォワードネットワークを用いて、前記マップクエリ及び前記アップデートされたBEV特徴から前記マップトークンを生成するステップを含むことができる。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
三星電子株式会社
冷蔵庫
1か月前
三星電子株式会社
冷蔵庫
1か月前
三星電子株式会社
保持装置
1か月前
三星電子株式会社
実装装置
1か月前
三星電子株式会社
半導体装置
12日前
三星電子株式会社
半導体素子
1か月前
三星電子株式会社
半導体素子
1か月前
三星電子株式会社
半導体装置
26日前
三星電子株式会社
半導体装置
1か月前
三星電子株式会社
半導体装置
4日前
三星電子株式会社
固体撮像装置
1か月前
三星電子株式会社
固体二次電池
1か月前
三星電子株式会社
イメージセンサ
3日前
三星電子株式会社
モータ駆動装置
1か月前
三星電子株式会社
半導体接合装置
1か月前
三星電子株式会社
イメージセンサ
25日前
三星電子株式会社
半導体パッケージ
1か月前
三星電子株式会社
半導体パッケージ
17日前
三星電子株式会社
半導体パッケージ
24日前
三星電子株式会社
半導体パッケージ
1か月前
三星電子株式会社
イメージセンサー
11日前
三星電子株式会社
イメージセンサー
1か月前
三星電子株式会社
半導体パッケージ
25日前
三星電子株式会社
半導体パッケージ
4日前
三星電子株式会社
集積回路パッケージ
1か月前
三星電子株式会社
集積回路装置の製造方法
19日前
三星電子株式会社
トランスフォーマー加速装置
12日前
三星電子株式会社
周辺回路領域を含む半導体素子
1か月前
三星電子株式会社
半導体装置およびその製造方法
4日前
三星電子株式会社
スペーサを含む半導体パッケージ
3日前
三星電子株式会社
イメージセンサ及びその動作方法
1か月前
三星電子株式会社
イメージセンサ及びその動作方法
25日前
三星電子株式会社
半導体パッケージ及びその製造方法
11日前
三星電子株式会社
イメージセンサー及びその動作方法
1か月前
三星電子株式会社
車両の走行を制御する方法と装置及び車両
3日前
三星電子株式会社
半導体装置及びこれを含むデータ記憶システム
1か月前
続きを見る
他の特許を見る










 特許ウォッチ
特許ウォッチ