TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025150331
公報種別
公開特許公報(A)
公開日
2025-10-09
出願番号
2024051153
出願日
2024-03-27
発明の名称
実装装置
出願人
三星電子株式会社
,
Samsung Electronics Co.,Ltd.
代理人
IBC一番町弁理士法人
主分類
H01L
21/60 20060101AFI20251002BHJP(基本的電気素子)
要約
【課題】チップや基板等の被接合部材を保持するシリンダロッドの垂直方向及び回転方向を高精度に位置制御すること。
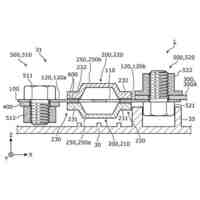
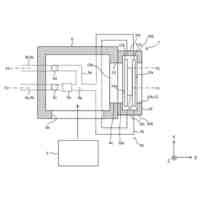
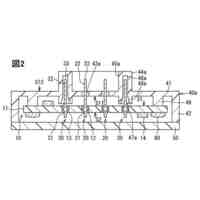
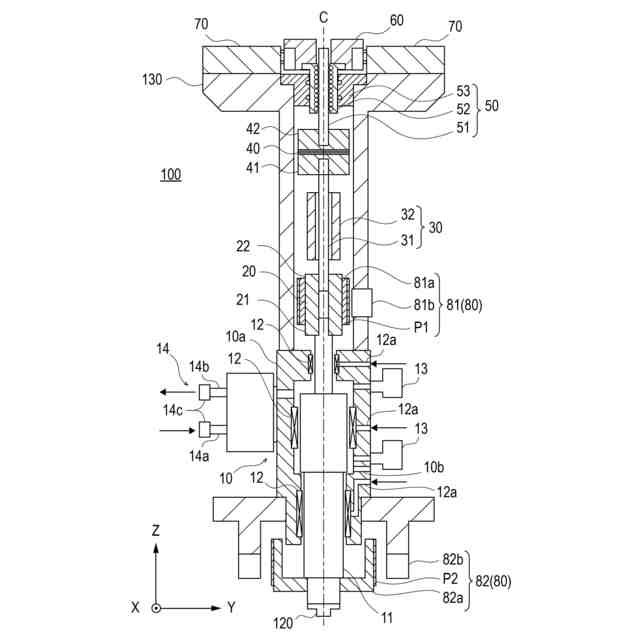
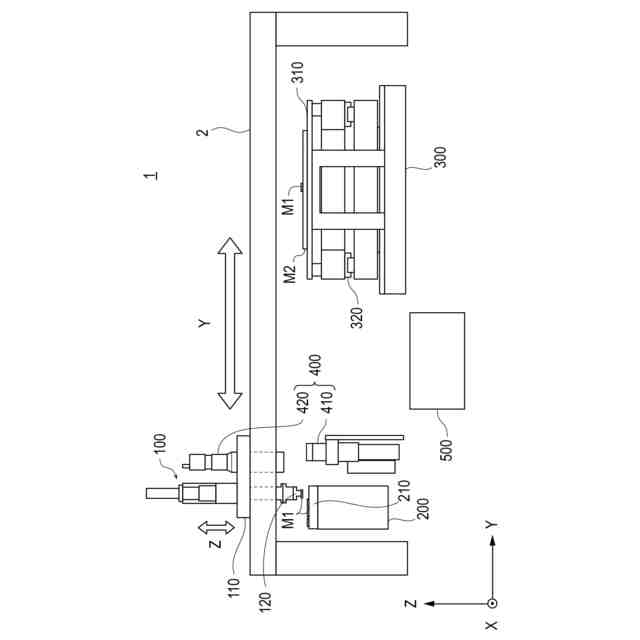
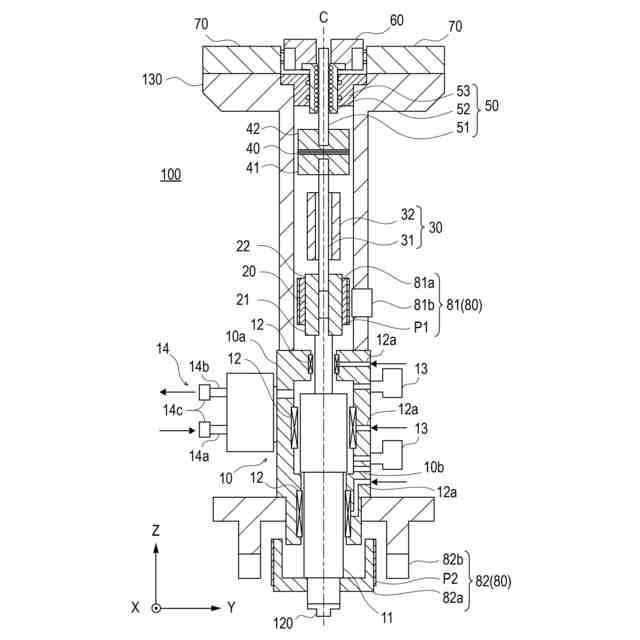
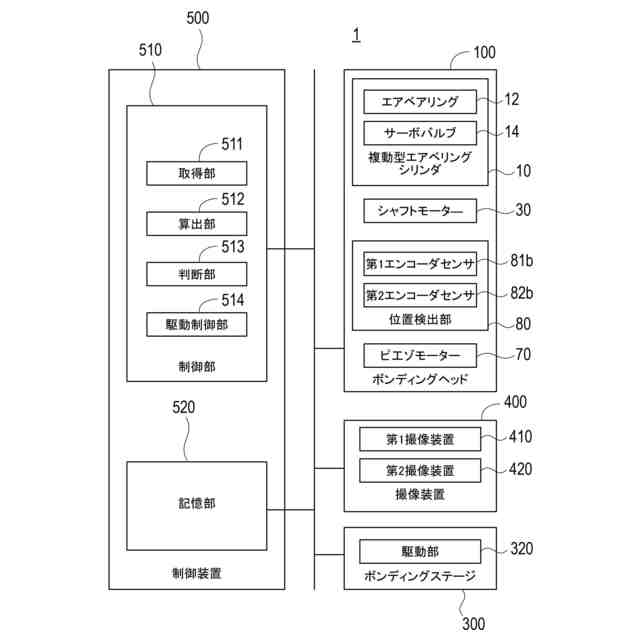
【解決手段】ボンディングヘッド100は、シリンダロッド11を垂直方向に第1垂直移動量だけ移動させる複動型エアベアリングシリンダ10と、シリンダロッド11と同軸上に配置され第1エンコーダパターン21を有する第1スケール22と、第1エンコーダパターン21の位置を読み取る第1エンコーダセンサ23と、シリンダロッド11と同軸上に配置され第2エンコーダパターン24を有する第2スケール25と、第2エンコーダパターン24の位置を読み取る第2エンコーダセンサ26と、シリンダロッド11と同軸上に配置され第1エンコーダセンサ23の読み取り結果に基づきシリンダロッド11を垂直方向に第2垂直移動量だけ移動させるシャフトモーター30と、シリンダロッド11と同軸上に配置されシリンダロッド11を回転方向に回転移動量だけ移動させるピエゾモーター40と、を備える。
【選択図】図2
特許請求の範囲
【請求項1】
ボンディングヘッドとボンディングステージと、を備える実装装置であって、
前記ボンディングヘッドは、
垂直方向に延在するシリンダロッドを有し、前記シリンダロッドを垂直方向に第1垂直移動量だけ移動させる複動型エアベアリングシリンダと、
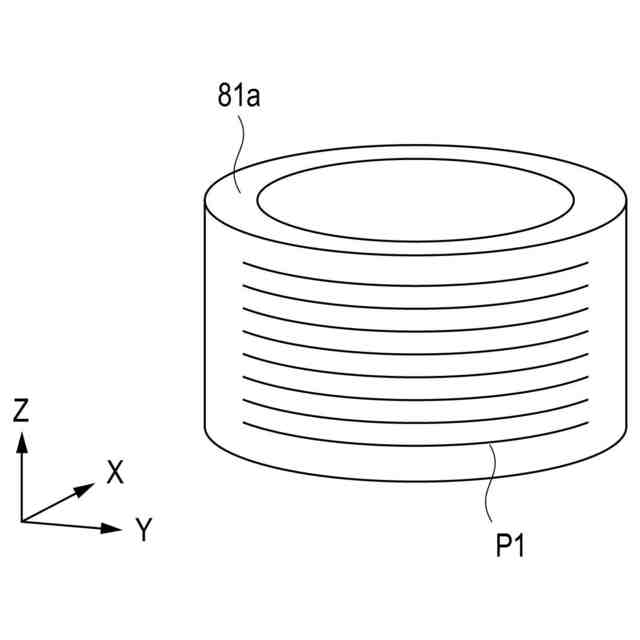
前記シリンダロッドの回転方向の動作範囲を許容するように前記シリンダロッドと同軸上に配置され、前記シリンダロッドの垂直方向の位置が検出可能なパターン列からなる第1エンコーダパターンを有する第1スケールと、
前記第1スケールと対向する位置に配置され、前記第1エンコーダパターンの位置を読み取る第1エンコーダセンサと、
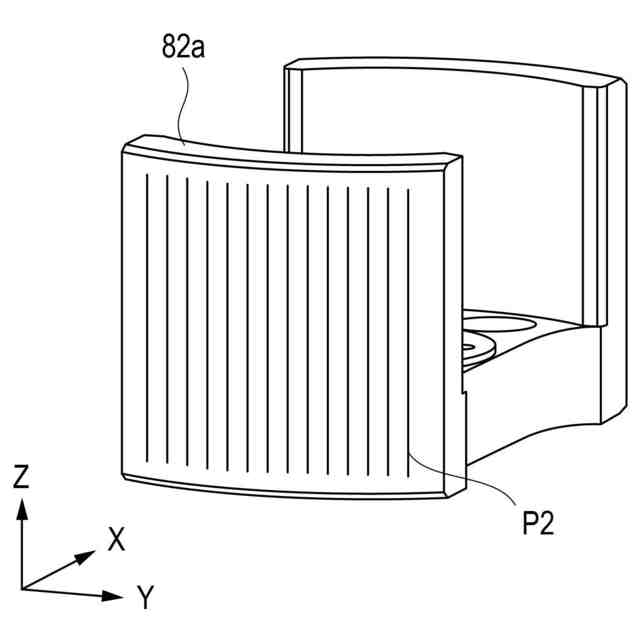
前記シリンダロッドの垂直方向の動作範囲を許容するように前記シリンダロッドと同軸上に配置され、前記シリンダロッドの回転方向の位置が検出可能なパターン列からなる第2エンコーダパターンを有する第2スケールと、
前記第2スケールと対向する位置に配置され、前記第2エンコーダパターンの位置を読み取る第2エンコーダセンサと、
前記シリンダロッドと同軸上に配置され、前記第1エンコーダセンサの読み取り結果に基づき、前記シリンダロッドの垂直方向の位置が目標垂直位置となるように、垂直位置整定時に前記シリンダロッドの垂直方向の位置を第2垂直移動量だけ移動させるシャフトモーターと、
前記シリンダロッドと同軸上に配置され、前記第2エンコーダセンサの読み取り結果に基づき、前記シリンダロッドの回転位置が目標回転位置となるように、前記シリンダロッドを回転方向に回転移動量だけ移動させるピエゾモーターと、
を備える、実装装置。
続きを表示(約 1,000 文字)
【請求項2】
前記第2スケールは、前記複動型エアベアリングシリンダの前記シリンダロッドの下部に設けられる、請求項1に記載の実装装置。
【請求項3】
前記複動型エアベアリングシリンダは、前記シャフトモーターより下方に配置される、請求項1に記載の実装装置。
【請求項4】
スプラインシャフトと、スプラインナットと、外側軌道輪が前記ボンディングヘッドのハウジングに固定され内輪軌道輪が前記スプラインナットに固定されるアンギュラベアリングと、を含み、前記シャフトモーターより上方に配置されて前記ピエゾモーターの駆動力を伝達するボールスプラインと、
前記スプラインシャフトの下部と、前記シャフトモーターのマグネットロッドの上部と、を同期回転可能に連結するフレキシブルカップリングと、
前記シャフトモーターの前記マグネットロッドの下部と、前記複動型エアベアリングシリンダの前記シリンダロッドの上部と、を同期回転可能に連結するリジッドカップリングと、
前記スプラインナットに固定され、前記ピエゾモーターの駆動力を回転力に変換して前記スプラインナットに伝達するロータと、
を備える、請求項1に記載の実装装置。
【請求項5】
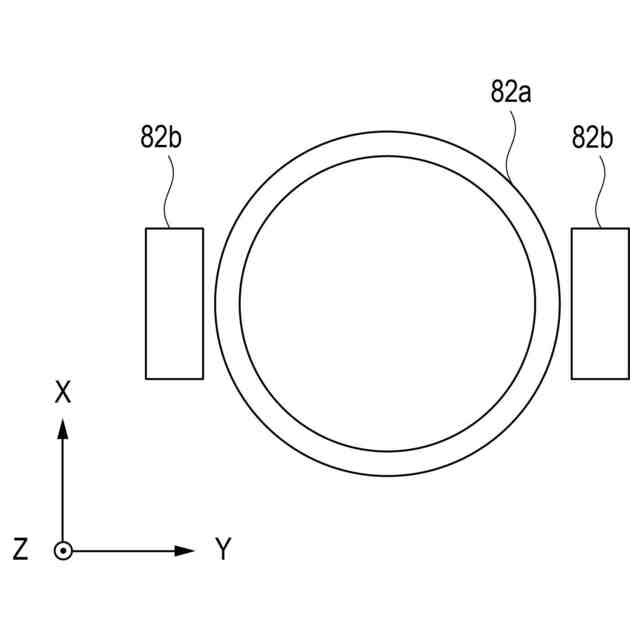
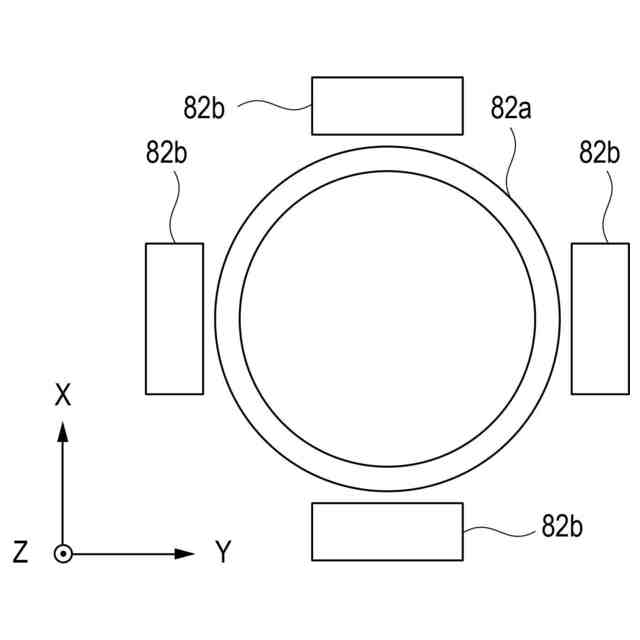
前記第2エンコーダセンサは、前記第2スケールの周囲に複数配置され、前記複動型エアベアリングシリンダのロッド先端の水平方向の位置ズレを検出する、請求項1に記載の実装装置。
【請求項6】
前記複動型エアベアリングシリンダは、前記シリンダロッドが前記第1垂直移動量で移動するように、シリンダ内へのエアーの流入出量を調整するサーボバルブを備える、請求項1に記載の実装装置。
【請求項7】
前記シャフトモーターの推力平均値を算出する算出部と、
前記シャフトモーターの駆動状態を取得する取得部と、
前記算出部で算出した前記推力平均値と、予め設定された閾値とを比較して前記推力平均値が前記閾値を超えたか否かを判断する判断部と、
前記判断部の判断結果に基づき、前記シャフトモーターへの負荷が許容値を超えないように前記複動型エアベアリングシリンダのサーボバルブの開度を調整する駆動制御部と、
を含む制御装置を備える、請求項1~6の何れか1項に記載の実装装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、実装装置に関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
低消費電力及び高駆動速度を達成するために、半導体デバイスの多層化が進んでおり、CoC(Chip on Chip)、CoW(Chip on Wafer)といった半導体チップの積層や半導体パッケージの実装工程であるチップボンディング工程は、従来のワイヤーボンディングによる接点間連結方式から、より省スペース化が図れるフリップチップ或いはシリコン貫通電極(TSV)による連結方式へと変化している。
【0003】
ところで、ワイヤーボンディングによる接点間連結方式では、数十μm程度のボンディング精度とすれば十分である。これに対し、フリップチップ等による連結方式では、バンプの微細化や高密度化、チップサイズの拡大化に伴い、高荷重での実装及び生産性の向上を図りつつ、角度誤差によるバンプの位置ズレの影響を低減させるため、実装精度としてサブμmの精度が要求される。そのため、垂直方向への位置制御に加えてボンディングヘッドの回転方向の位置制御が重要となる。
【0004】
また、ウェハ、半導体チップ、インターポーザ等の被接合部材をフリップチップ実装する場合、位置制御を行うための画像処理の高精度化も重要となる。しかし、画像のピクセル分解能を上げるために高倍率化を図ると被写界深度が浅くなるため、垂直方向への位置制御も高精度化が求められる。
【0005】
下記特許文献1には、チップや基板等の被加圧体に応じた加圧力で被加圧体を加圧制御する加圧装置について開示されている。また、下記特許文献2には、ロッドの位置制御として垂直方向に加えて回転方向の位置制御を可能とした流体圧アクチュエータについて開示されている。
【先行技術文献】
【特許文献】
【0006】
特開2010-64127号公報
特開2015-113868号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
特許文献1の装置は、垂直方向の位置と荷重制御についての制御は行われているが回転方向の制御は行えないため、実装精度が確保できない。また、特許文献2の装置は、ボンディング位置を調整するために回転制御を行っているが、回転軸とロッドの軸が同軸上ではなく離れて配置されており、高精度に回転位置を制御することは難しい。
【0008】
本発明は、上述の事情に鑑みてなされたものであり、具体的には、チップや基板等の被接合部材を保持するシリンダロッドの垂直方向及び回転方向を高精度に位置制御できる実装装置を提供することである。
【課題を解決するための手段】
【0009】
上記課題は、以下(1)~(7)の何れかの手段により達成される。
【0010】
(1)ボンディングヘッドとボンディングステージと、を備える実装装置であって、前記ボンディングヘッドは、垂直方向に延在するシリンダロッドを有し、前記シリンダロッドを垂直方向に第1垂直移動量だけ移動させる複動型エアベアリングシリンダと、前記シリンダロッドの回転方向の動作範囲を許容するように前記シリンダロッドと同軸上に配置され、前記シリンダロッドの垂直方向の位置が検出可能なパターン列からなる第1エンコーダパターンを有する第1スケールと、前記第1スケールと対向する位置に配置され、前記第1エンコーダパターンの位置を読み取る第1エンコーダセンサと、前記シリンダロッドの垂直方向の動作範囲を許容するように前記シリンダロッドと同軸上に配置され、前記シリンダロッドの回転方向の位置が検出可能なパターン列からなる第2エンコーダパターンを有する第2スケールと、前記第2スケールと対向する位置に配置され、前記第2エンコーダパターンの位置を読み取る第2エンコーダセンサと、前記シリンダロッドと同軸上に配置され、前記第1エンコーダセンサの読み取り結果に基づき、前記シリンダロッドの垂直方向の位置が目標垂直位置となるように、垂直位置整定時に前記シリンダロッドの垂直方向の位置を第2垂直移動量だけ移動させるシャフトモーターと、前記シリンダロッドと同軸上に配置され、前記第2エンコーダセンサの読み取り結果に基づき、前記シリンダロッドの回転位置が目標回転位置となるように、前記シリンダロッドを回転方向に回転移動量だけ移動させるピエゾモーターと、を備える、実装装置。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
APB株式会社
蓄電セル
1か月前
東ソー株式会社
絶縁電線
1か月前
マクセル株式会社
電源装置
1か月前
株式会社東芝
端子台
1か月前
ローム株式会社
半導体装置
1か月前
三菱電機株式会社
回路遮断器
19日前
株式会社ホロン
冷陰極電子源
1か月前
株式会社GSユアサ
蓄電装置
11日前
株式会社GSユアサ
蓄電装置
25日前
富士電機株式会社
電磁接触器
11日前
株式会社GSユアサ
蓄電装置
1か月前
株式会社GSユアサ
蓄電装置
1か月前
日本特殊陶業株式会社
保持装置
24日前
ホシデン株式会社
複合コネクタ
5日前
日新イオン機器株式会社
基板処理装置
1か月前
大電株式会社
電線又はケーブル
3日前
トヨタ自動車株式会社
冷却構造
1か月前
日本特殊陶業株式会社
保持装置
1か月前
トヨタ自動車株式会社
バッテリ
1か月前
北道電設株式会社
配電具カバー
1か月前
トヨタ自動車株式会社
蓄電装置
1か月前
トヨタ自動車株式会社
蓄電装置
3日前
日本無線株式会社
レーダアンテナ
26日前
株式会社トクヤマ
シリコンエッチング液
1か月前
株式会社デンソー
電子装置
1か月前
住友電装株式会社
コネクタ
1か月前
トヨタ自動車株式会社
密閉型電池
1か月前
ヒロセ電機株式会社
電気コネクタ
11日前
株式会社トクヤマ
シリコンエッチング液
1か月前
株式会社レゾナック
冷却器
19日前
トヨタ自動車株式会社
電池パック
1か月前
日亜化学工業株式会社
半導体レーザ素子
1か月前
トヨタ自動車株式会社
電池パック
1か月前
ローム株式会社
半導体モジュール
12日前
甲神電機株式会社
変流器及び零相変流器
26日前
矢崎総業株式会社
コネクタ
11日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ