TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025150184
公報種別
公開特許公報(A)
公開日
2025-10-09
出願番号
2024050936
出願日
2024-03-27
発明の名称
保持装置
出願人
三星電子株式会社
,
Samsung Electronics Co.,Ltd.
代理人
個人
主分類
G01B
11/00 20060101AFI20251002BHJP(測定;試験)
要約
【課題】対象物を保持しながら、対象物の姿勢を把握し、安定して保持することが可能な保持装置を提供する。
【解決手段】一部が開口された筐体10と、筐体10の開口部を覆い、透光性を有する弾性体により形成され、保持対象物に接触して保持対象物を保持する接触部20と、筐体10内に設けられ、接触部20を通して、接触部20の表面および保持対象物を撮影する撮影部50と、撮影部50により撮影された接触部20の表面および保持対象物の画像に基づき、接触部20に保持されている保持対象物の接触状態を推定する推定装置と、を備える。
【選択図】図2
特許請求の範囲
【請求項1】
一部が開口された筐体と、
前記筐体の開口部を覆い、透光性を有する弾性体により形成され、保持対象物に接触して当該保持対象物を保持する接触部と、
前記筐体内に設けられ、前記接触部を通して、当該接触部の表面および前記保持対象物を撮影する撮影部と、
前記撮影部により撮影された前記接触部の表面および前記保持対象物の画像に基づき、当該接触部に保持されている当該保持対象物の接触状態を推定する推定装置と、
を備えることを特徴とする、保持装置。
続きを表示(約 1,000 文字)
【請求項2】
前記接触部は、空気を吸引するための吸引孔を有し、当該吸引孔の位置と保持対象物の位置とを合わせて当該吸引孔から空気を吸引することにより、当該保持対象物を吸着することを特徴とする、請求項1に記載の保持装置。
【請求項3】
前記接触部の保持対象物と接触する面に、所定の幾何学的パターンによるマーカが付されており、
前記推定装置は、前記撮影部により撮影された画像における前記マーカの変形量に基づき、前記接触部に保持されている保持対象物の接触状態を推定すること
を特徴とする、請求項1または請求項2に記載の保持装置。
【請求項4】
前記接触部の保持対象物と接触する面に、透光性を有する樹脂により形成された被膜が設けられていることを特徴とする、請求項1または請求項2に記載の保持装置。
【請求項5】
前記接触部に設けられた前記被膜に、所定のパターンによるマーカが付されており、
前記推定装置は、前記撮影部により撮影された画像における前記マーカの変形量に基づき、前記接触部に保持されている保持対象物の接触状態を推定すること
を特徴とする、請求項4に記載の保持装置。
【請求項6】
前記筐体内から前記接触部に対し、前記撮影部による撮影のための光を照射する照明部をさらに備えることを特徴とする、請求項1に記載の保持装置。
【請求項7】
前記撮影部は、
受光に応じて電気信号を出力する受光素子群と、
前記受光素子群上に複数の画像を結像する複数の光学系と、
を備えることを特徴とする、請求項1に記載の保持装置。
【請求項8】
前記撮影部の複数の光学系は、
一のレンズと、
前記レンズを通った光が前記受光素子群上で複数の画像を結像するように、当該レンズに複数の入射光を入射させる複数の開口を有する絞り板と、
を備えることを特徴とする、請求項7に記載の保持装置。
【請求項9】
前記撮影部の複数の光学系は、
前記接触部の保持対象物と接触する面に焦点距離を合わせて前記受光素子群上に結像させる第1光学系と、
前記接触部の保持対象物と接触する面よりも遠い位置に焦点距離を合わせて前記受光素子群上に結像させる第2光学系と、
を含むことを特徴とする、請求項8に記載の保持装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、保持装置に関する。
続きを表示(約 3,000 文字)
【背景技術】
【0002】
ロボットアーム等では、触覚センサを用いて保持対象物を検知しながら保持する保持装置が用いられる。特許文献1には、把持対象物に接触可能な第一の面と、前記第一の面の裏面である第二の面とを備える透過部と、前記透過部の前記第一の面側に存在する物体の像を前記第二の面側から撮像可能な撮像部と、前記透過部の前記第二の面側に配置され、前記透過部の少なくとも一部の領域からの光を反射させて前記撮像部の撮像画角内に導く反射部とを備える触覚センサが開示されている。
【先行技術文献】
【特許文献】
【0003】
国際公開第2021/001992号
【発明の概要】
【発明が解決しようとする課題】
【0004】
ロボットアーム等による対象物の保持では、種々の対象物を認識し、姿勢を把握しながら安定して保持することが求められる。
【0005】
本発明は、対象物を保持しながら、対象物の姿勢を把握し、安定して保持することが可能な保持装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
かかる目的のもと、一部が開口された筐体と、筐体の開口部を覆い、透光性を有する弾性体により形成され、保持対象物に接触して保持対象物を保持する接触部と、筐体内に設けられ、接触部を通して、接触部の表面および保持対象物を撮影する撮影部と、撮影部により撮影された接触部の表面および保持対象物の画像に基づき、接触部に保持されている保持対象物の接触状態を推定する推定装置と、を備える、保持装置を提供する。
接触部は、空気を吸引するための吸引孔を有し、吸引孔の位置と保持対象物の位置とを合わせて吸引孔から空気を吸引することにより、保持対象物を吸着する構成としても良い。
また、接触部の保持対象物と接触する面に、所定の幾何学的パターンによるマーカが付されており、推定装置は、撮影部により撮影された画像におけるマーカの変形量に基づき、接触部に保持されている保持対象物の接触状態を推定することとしても良い。
また、接触部の保持対象物と接触する面に、透光性を有する樹脂により形成された被膜を設けた構成としても良い。
また、接触部に設けられた前記被膜に、所定のパターンによるマーカが付されており、推定装置は、撮影部により撮影された画像におけるマーカの変形量に基づき、接触部に保持されている保持対象物の接触状態を推定することとしても良い。
また、筐体内から前記接触部に対し、前記撮影部による撮影のための光を照射する照明部をさらに備える構成としても良い。
撮影部は、受光に応じて電気信号を出力する受光素子群と、受光素子群上に複数の画像を結像する複数の光学系と、を備える構成としても良い。
撮影部の複数の光学系は、一のレンズと、レンズを通った光が受光素子群上で複数の画像を結像するように、レンズに複数の入射光を入射させる複数の開口を有する絞り板と、を備える構成としても良い。
撮影部の複数の光学系は、接触部の保持対象物と接触する面に焦点距離を合わせて受光素子群上に結像させる第1光学系と、接触部の保持対象物と接触する面よりも遠い位置に焦点距離を合わせて受光素子群上に結像させる第2光学系と、を含む構成としても良い。
【発明の効果】
【0007】
本発明によれば、対象物を保持しながら、対象物の姿勢を把握し、安定して保持することが可能な保持装置を実現することができる。
【図面の簡単な説明】
【0008】
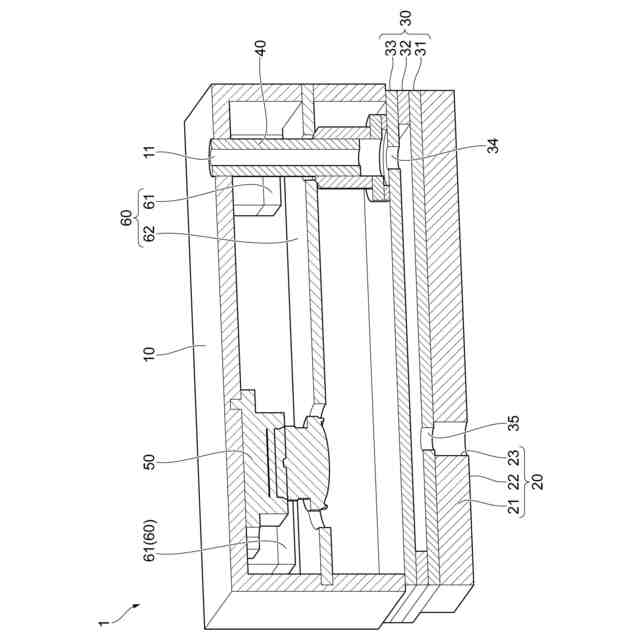
光学式触覚センサ(Optical Tactile Sensor:OTS)の機能を備えた保持装置の外観を示す図である。
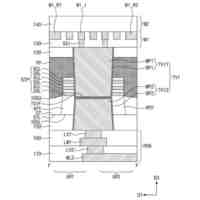
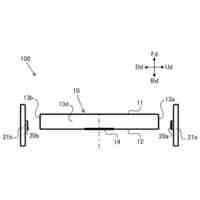
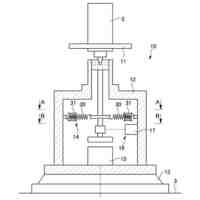
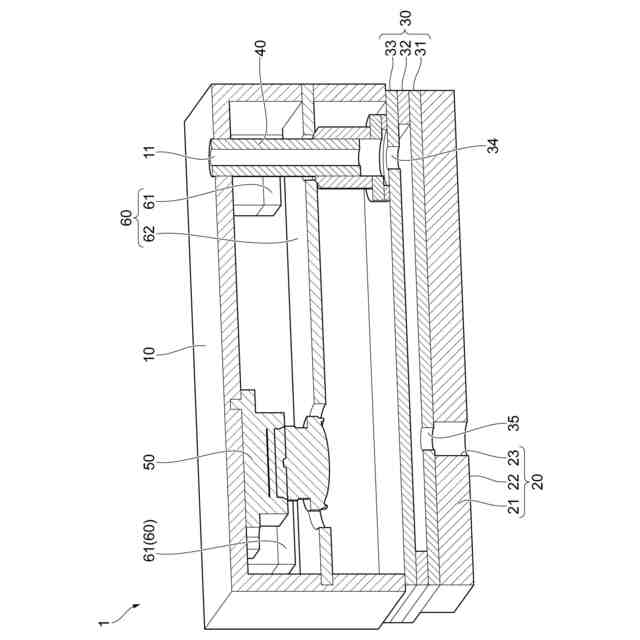
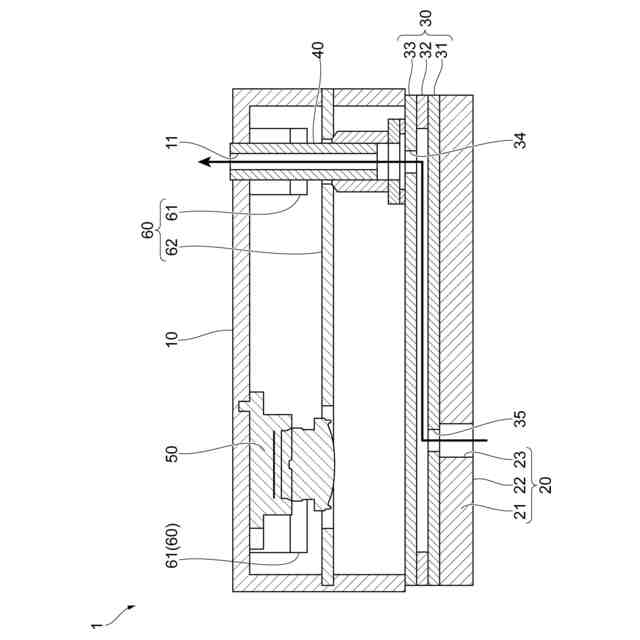
図1に示す保持装置の内部構造を示す断面図である。
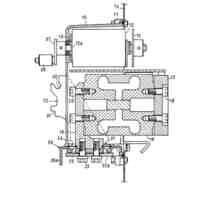
保持装置の吸引構造を示す図である。
底板の構造を示す図である。
保持装置の撮影部の光学系の構成を示す図である。
撮影部の構成例を示す図である。
撮影部において近距離と遠距離の二つの画像を得る構成を模式的に示す図である。
撮影部において近距離と遠距離の二つの画像を得る他の構成を模式的に示す図である。
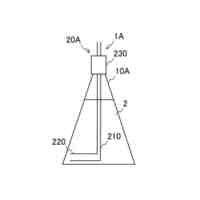
保持装置が対象物であるコネクタと、コネクタの装着先であるソケットとを検知した状態を示す図である。
保持装置がコネクタを保持した状態を示す図である。
保持装置が保持したコネクタをソケットに装着した状態を示す図である。
保持装置がコネクタの保持を解除した状態を示す図である。
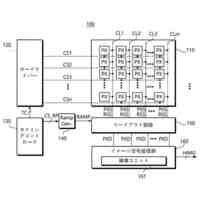
処理装置のハードウェア構成例を示す図である。
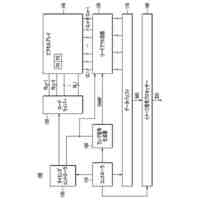
処理装置の機能構成を示す図である。
マーカの変位の例を示す図であり、図15(A)は初期状態のマーカを示す図、図15(B)は時刻tのマーカの状態を示す図、図15(C)は、図15(A)(B)のマーカの位置を重ねた状態を示す図である。
一つのドットが変位した際のドットの重なりの例を示す図である。
複数のドットの対応を示す図である。
図15(C)の例において、追跡対象から除かれるドットを明示する図である。
第1変位の例を示す図である。
第2変位の例を示す図である。
保持装置の接触部に作用する力と接触部の変形量との関係を示すグラフである。
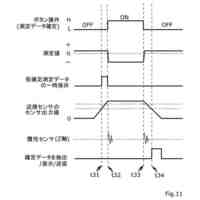
保持装置の動作例を示す図であり、図22(A)は保持装置が対象物を保持した状態を示す図、図22(B)は保持装置が対象物を設置位置に設置しようとしている様子を示す図、図22(C)は対象物が設置位置に正しく設置された状態を示す図である。
【発明を実施するための形態】
【0009】
以下、添付図面を参照して、本発明の実施形態について詳細に説明する。
<システム構成>
図1は、光学式触覚センサ(Optical Tactile Sensor:OTS)の機能を備えた保持装置の外観を示す図である。図2は、図1に示す保持装置の内部構造を示す断面図である。本実施形態の保持装置1は、筐体10と、接触部20と、底板30とを備える。保持装置1は、底板30側で保持対象物(以下、単に「対象物」と呼ぶ)を保持する。筐体10の内部には、吸引筒40と、撮影部50と、照明部60とが収容されている。
【0010】
図示しないが、保持装置1は、腕部(ロボットアーム)の先端等に設けられ移動可能である。また、保持装置1には、保持装置1の対象物に接する面側の空気を吸引する吸引装置(図示せず)が接続される。保持装置1は、吸引装置が空気を吸引することにより、対象物を吸着して保持する。保持装置1による対象物の保持方法の詳細は後述する。保持装置1、腕部(ロボットアーム)、吸引装置は、図示しない制御装置により制御される。制御装置は、例えば、コンピュータにより実現される。保持装置1は、制御装置の制御に基づく腕部の動作により移動し、対象物を保持して設置位置に設置する。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
三星電子株式会社
半導体装置
12日前
三星電子株式会社
半導体装置
4日前
三星電子株式会社
イメージセンサ
3日前
三星電子株式会社
半導体パッケージ
24日前
三星電子株式会社
イメージセンサー
11日前
三星電子株式会社
半導体パッケージ
17日前
三星電子株式会社
半導体パッケージ
4日前
三星電子株式会社
集積回路装置の製造方法
19日前
三星電子株式会社
トランスフォーマー加速装置
12日前
三星電子株式会社
半導体装置およびその製造方法
4日前
三星電子株式会社
スペーサを含む半導体パッケージ
3日前
三星電子株式会社
半導体パッケージ及びその製造方法
11日前
三星電子株式会社
車両の走行を制御する方法と装置及び車両
3日前
三星電子株式会社
半導体装置及びこれを含むデータ記憶システム
3日前
三星電子株式会社
オンチップ偏光ルーティングのシステム及び方法
4日前
三星電子株式会社
イメージセンサー及びその動作方法並びに電子装置
11日前
三星電子株式会社
レジスト組成物及びそれを用いたパターン形成方法
11日前
三星電子株式会社
イメージセンサー及びイメージセンサーの駆動方法
4日前
三星電子株式会社
アイドルまたは非アクティブのユーザ機器に対するオンデマンドシステム情報の早期通知および設定のためのシステムおよび方法
11日前
個人
採尿及び採便具
1か月前
日本精機株式会社
検出装置
26日前
個人
アクセサリー型テスター
1か月前
個人
高精度同時多点測定装置
1か月前
個人
計量機能付き容器
21日前
甲神電機株式会社
電流検出装置
26日前
株式会社カクマル
境界杭
11日前
日本精機株式会社
発光表示装置
4日前
株式会社ミツトヨ
測定器
1か月前
株式会社トプコン
測量装置
3日前
アズビル株式会社
電磁流量計
1か月前
ダイキン工業株式会社
監視装置
1か月前
トヨタ自動車株式会社
監視装置
1か月前
大成建設株式会社
風洞実験装置
21日前
大和製衡株式会社
組合せ計量装置
1か月前
日本信号株式会社
距離画像センサ
24日前
愛知時計電機株式会社
ガスメータ
1か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ