TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025173590
公報種別
公開特許公報(A)
公開日
2025-11-28
出願番号
2024079186
出願日
2024-05-15
発明の名称
農業機械
出願人
株式会社クボタ
代理人
安田岡本弁理士法人
主分類
A01B
63/02 20060101AFI20251120BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】耕耘装置を上昇させて非作業状態に移行する時に、地面を適切な状態に保つことができる。
【解決手段】農業機械は、車体と、車体を走行可能に支持する走行装置と、回転駆動する耕耘爪を有する耕耘装置と、車体に耕耘装置を昇降可能に連結する昇降装置と、耕耘装置が作業を行う作業状態から、昇降装置が耕耘装置を上昇させ且つ当該耕耘装置が作業を行わない非作業状態に移行するにつれて、耕耘爪を回転駆動させる動力の出力を徐々に低下させる低下処理を行う制御装置と、を備えている。
【選択図】図6A
特許請求の範囲
【請求項1】
車体と、
前記車体を走行可能に支持する走行装置と、
回転駆動する耕耘爪を有する耕耘装置と、
前記車体に前記耕耘装置を昇降可能に連結する昇降装置と、
前記耕耘装置が作業を行う作業状態から、前記昇降装置が前記耕耘装置を上昇させ且つ当該耕耘装置が作業を行わない非作業状態に移行するにつれて、前記耕耘爪を回転駆動させる動力の出力を徐々に低下させる低下処理を行う制御装置と、
を備えている農業機械。
続きを表示(約 1,000 文字)
【請求項2】
前記耕耘爪を回転駆動させる動力を発生させる駆動源を備え、
前記制御装置は、前記低下処理として、前記駆動源から前記耕耘爪に伝達する動力の出力及び/又は回転速度を制御し、前記耕耘爪の回転速度を徐々に低下させる請求項1に記載の農業機械。
【請求項3】
前記昇降装置及び/又は前記耕耘装置の圃場からの高さ情報を検出する高さ検出装置を備え、
前記制御装置は、前記高さ検出装置が検出した前記高さ情報に基づいて、前記低下処理を行う請求項2に記載の農業機械。
【請求項4】
前記走行装置は、舵角を変更することで前記車体の直進度合いを変更し、
前記制御装置は、前記舵角に基づいて、前記低下処理を行うか否かを判断する請求項3に記載の農業機械。
【請求項5】
前記制御装置は、前記舵角が所定以上である場合に、前記低下処理を行う請求項4に記載の農業機械。
【請求項6】
圃場を示す圃場マップを記憶する記憶装置を備え、
前記制御装置は、前記圃場マップにおける前記車体の位置に基づいて、前記低下処理を行うか否かを判断する請求項3に記載の農業機械。
【請求項7】
前記圃場マップは、前記車体が旋回する旋回領域を含み、
前記制御装置は、前記車体が前記旋回領域の近傍に接近、及び/又は当該旋回領域に位置している場合に、前記低下処理を行う請求項6に記載の農業機械。
【請求項8】
圃場に定義され、且つ前記車体が走行する経路である走行予定ラインを記憶する記憶装置を備え、
前記制御装置は、前記走行予定ラインにおける前記車体の位置に基づいて、前記低下処理を行うか否かを判断する請求項3に記載の農業機械。
【請求項9】
前記走行予定ラインは、前記車体が直進走行する直進部と、前記車体が旋回走行する旋回部と、を含み、
前記制御装置は、前記車体が前記旋回部に位置している場合に、前記低下処理を行う請求項8に記載の農業機械。
【請求項10】
前記昇降装置を操作し、前記耕耘装置を任意の高さに上昇させる第1操作具と、
前記第1操作具と異なり、且つ前記昇降装置を操作し、前記耕耘装置を所定の高さまで上昇させる第2操作具と、
を備え、
前記制御装置は、前記第2操作具が操作され、前記耕耘装置を上昇させる場合に前記低下処理を行う請求項3に記載の農業機械。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、耕耘装置を備える農業機械に関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
特許文献1に開示された作業車は、走行車体の後部に装備されたロータリ耕耘装置を昇降駆動する昇降機構を備え、中間位置から上昇位置まで上昇させる速度よりも低速で、ロータリ耕耘装置を下降位置から中間位置まで上昇させるように、昇降機構を駆動させる。
【先行技術文献】
【特許文献】
【0003】
特開2008-278840号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記特許文献1の構成では、ロータリ耕耘装置(耕耘装置)を上昇させた際の耕耘跡の発生を防止することができる。しかしながら、ロータリ耕耘装置が上昇位置に上昇してからロータリ耕耘装置の作動を停止するため、ロータリ耕耘装置を上昇させる際のロータリ爪(耕耘爪)の回転については着目されておらず、改善の余地があった。
【0005】
本発明は、このような従来技術の問題点を解決すべくなされたものであって、耕耘装置を上昇させて非作業状態に移行する時に、地面を適切な状態に保つことができる農業機機械の提供を目的とする。
【課題を解決するための手段】
【0006】
本発明の一態様に係る農業機械は、車体と、前記車体を走行可能に支持する走行装置と、回転駆動する耕耘爪を有する耕耘装置と、前記車体に前記耕耘装置を昇降可能に連結する昇降装置と、前記耕耘装置が作業を行う作業状態から、前記昇降装置が前記耕耘装置を上昇させ且つ当該耕耘装置が作業を行わない非作業状態に移行するにつれて、前記耕耘爪を回転駆動させる動力の出力を徐々に低下させる低下処理を行う制御装置と、を備えている。
【発明の効果】
【0007】
上記の構成によれば、耕耘装置を上昇させて非作業状態に移行する時に、地面を適切な状態に保つことができる。
【図面の簡単な説明】
【0008】
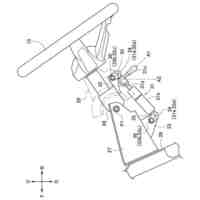
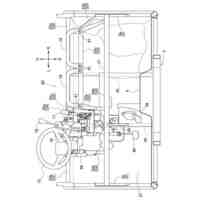
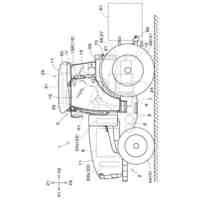
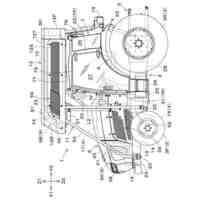
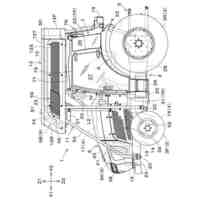
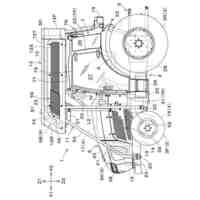
農業機械の一実施形態を示す側面図である。
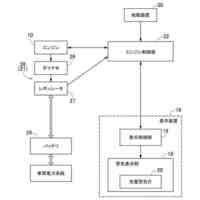
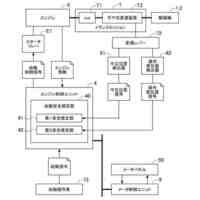
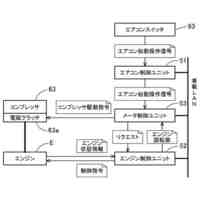
農業機械の一実施形態の構成の概要を示すブロック図である。
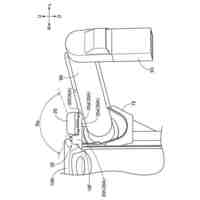
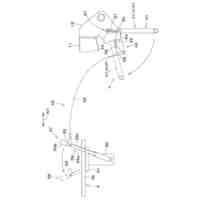
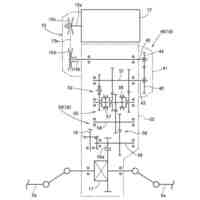
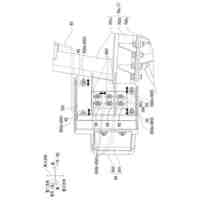
昇降装置の斜視図である。
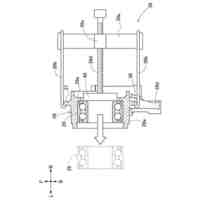
昇降装置の動作を示す一例である。
昇降装置の動作を示す他例である。
昇降装置の動作を示す他例である。
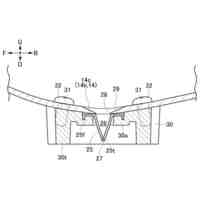
耕耘装置の作業状態を説明する図である。
耕耘装置の非作業状態を説明する図である。
作業状態から非作業状態に移行する時の最下点の軌跡を示す図である。
本実施形態の課題を説明する図である。
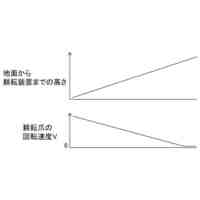
地面から耕耘装置までの高さと耕耘爪の回転速度の関係を示す図である。
地面から耕耘装置までの高さと耕耘爪の回転速度の関係の他例を示す図である。
変換マップの一例を示す図である。
本実施形態に係る基本フローチャート図である。
本実施形態に係る低下処理の判断条件の一例を示すフローチャート図である。
圃場マップ及び走行予定ルートを説明する図である。
第1の変形例に係る低下処理の判断条件の一例を示すフローチャート図である。
第2の変形例に係る低下処理の判断条件の一例を示すフローチャート図である。
第3の変形例に係る低下処理の判断条件の一例を示すフローチャート図である。
第3の変形例に係る低下処理の判断条件の他例を示すフローチャート図である。
第4の変形例に係る低下処理の判断条件の一例を示すフローチャート図である。
第4の変形例に係る低下処理の判断条件の他例を示すフローチャート図である。
【発明を実施するための形態】
【0009】
以下、本発明の一実施形態について、図面を参照しながら説明する。
【0010】
図1は、農業機械100の一実施形態を示す側面図である。本実施形態において、農業機械100として、耕耘装置2が取り付けられた作業車両(トラクタ)1を例に説明する。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社クボタ
作業車
1か月前
株式会社クボタ
作業車
1か月前
株式会社クボタ
作業車
16日前
株式会社クボタ
移植機
1か月前
株式会社クボタ
作業車
1か月前
株式会社クボタ
作業車
1か月前
株式会社クボタ
作業車
1か月前
株式会社クボタ
作業車
29日前
株式会社クボタ
作業車
1か月前
株式会社クボタ
作業車
14日前
株式会社クボタ
作業車
1か月前
株式会社クボタ
作業車
1か月前
株式会社クボタ
作業車
1か月前
株式会社クボタ
作業車
1か月前
株式会社クボタ
作業車
1か月前
株式会社クボタ
移植機
1か月前
株式会社クボタ
作業車
14日前
株式会社クボタ
作業機
22日前
株式会社クボタ
作業車
1か月前
株式会社クボタ
作業車
1か月前
株式会社クボタ
作業機
8日前
株式会社クボタ
作業車
1か月前
株式会社クボタ
作業車
1か月前
株式会社クボタ
作業車
今日
株式会社クボタ
作業車両
2か月前
株式会社クボタ
作業車両
1か月前
株式会社クボタ
農業機械
今日
株式会社クボタ
作業車両
2か月前
株式会社クボタ
作業車両
1か月前
株式会社クボタ
作業車両
2か月前
株式会社クボタ
作業車両
1か月前
株式会社クボタ
作業車両
2か月前
株式会社クボタ
作業車両
2か月前
株式会社クボタ
作業車両
2か月前
株式会社クボタ
作業車両
2か月前
株式会社クボタ
作業車両
1か月前
続きを見る
他の特許を見る










 特許ウォッチ
特許ウォッチ