TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025173257
公報種別
公開特許公報(A)
公開日
2025-11-27
出願番号
2024078756
出願日
2024-05-14
発明の名称
作業支援装置、作業支援システム、ルート生成方法
出願人
株式会社クボタ
代理人
安田岡本弁理士法人
主分類
A01B
69/00 20060101AFI20251119BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】圃場で作業車両を走行させながら作業装置により作業を効率的に行うことができる作業ルートを作成する。
【解決手段】作業支援装置は、圃場を指定するための入力装置と、前記入力装置によって指定された前記圃場に関する圃場情報を取得する制御装置とを備え、前記制御装置は、前記圃場情報で示される前記圃場の作業領域に複数のブロックを区画して、複数の前記ブロックから第1ブロックと当該第1ブロックに対して他ブロックで隔てられた第2ブロックとから成るブロックペアを繰り返し設定することで、複数の前記ブロックを複数のブロックペアに組み分け、作業車両を走行させながら前記作業車両に装備された作業装置により、前記ブロックペア毎に前記第1ブロックと前記第2ブロックとに交互に作業を行う作業ルートを作成する。
【選択図】図1
特許請求の範囲
【請求項1】
圃場を指定するための入力装置と、
前記入力装置によって指定された前記圃場に関する圃場情報を取得する制御装置と、を備え、
前記制御装置は、
前記圃場情報で示される前記圃場の作業領域に複数のブロックを区画して、複数の前記ブロックから第1ブロックと当該第1ブロックに対して他ブロックで隔てられた第2ブロックとから成るブロックペアを繰り返し設定することで、複数の前記ブロックを複数の前記ブロックペアに組み分け、
作業車両を走行させながら前記作業車両に装備された作業装置により、前記ブロックペア毎に前記第1ブロックと前記第2ブロックとに交互に作業を行う作業ルートを作成する作業支援装置。
続きを表示(約 1,900 文字)
【請求項2】
前記制御装置は、
前記作業領域に所定の作業方向に対して垂直に並ぶ複数の前記ブロックを区画して、1つ又は2つの前記他ブロックで隔てられた前記第1ブロックと前記第2ブロックとから成る複数の前記ブロックペアを設定し、
前記作業車両を前記作業方向に走行させながら前記作業装置により、前記ブロックペア毎に前記第1ブロックと前記第2ブロックとに交互に前記作業を行う前記作業ルートを作成する請求項1に記載の作業支援装置。
【請求項3】
前記作業ルートを出力する出力装置を備え、
前記制御装置は、
前記作業車両を前記作業方向に走行させながら前記作業装置により複数の前記ブロックのそれぞれに前記作業を行う複数の作業ラインを作成し、
前記ブロックペア毎に前記第1ブロックと前記第2ブロックとに交互に前記作業を行い且つ複数の前記ブロックペアに所定順で前記作業を行う複数の前記作業ラインの作業順を決定し、
複数の前記作業ラインと前記作業順とを含む前記作業ルートを前記出力装置により出力する請求項2に記載の作業支援装置。
【請求項4】
前記制御装置は、
前記圃場情報から前記圃場の出入口を特定し、
前記作業装置に関する装置情報を取得して、前記装置情報から前記作業装置の作業幅と、前記作業車両に対する前記作業装置の相対位置とを特定し、
前記作業車両を自動運転及び自動操舵のいずれかで走行させながら、前記出入口の位置、前記作業幅、及び前記相対位置に応じて前記作業装置により、前記ブロックペア毎に交互に前記作業を行う複数の前記作業ラインを作成し且つ当該複数の作業ラインの作業順を決定する請求項3に記載の作業支援装置。
【請求項5】
前記制御装置は、
前記作業車両を走行させながら前記作業装置により、前記ブロックペア毎に前記他ブロックに対して最も遠い前記第1ブロックの遠方端と前記第2ブロックの遠方端のそれぞれから交互に前記作業を行う複数の前記作業ラインを作成し且つ当該複数の作業ラインの作業順を決定する請求項3に記載の作業支援装置。
【請求項6】
前記制御装置は、
複数の前記ブロックのうち、前記ブロックペアを成さない余りの第3ブロックが生じた場合、当該第3ブロックをいずれかの前記ブロックペアに加えて、前記第1ブロックと前記第2ブロックと前記第3ブロックとから成るブロックセットを設定し、
前記ブロックセットの前記第1ブロック、前記第2ブロック、及び前記第3ブロックにかわるがわる前記作業を行う複数の前記作業ラインを作成し且つ当該複数の作業ラインの作業順を決定する請求項3に記載の作業支援装置。
【請求項7】
前記制御装置は、
前記圃場で実施された先行作業に関する作業情報を取得して、当該作業情報から、前記作業車両及び前記作業車両と異なる作業車両のいずれかである先行作業車両を走行させながら前記先行作業車両に装備された先行作業装置により前記先行作業を行う複数の先行走行ラインを特定し、
複数の前記先行走行ラインに基づいて複数の前記ブロックを区画する請求項1に記載の作業支援装置。
【請求項8】
前記制御装置は、前記当該作業情報から前記先行作業車両が前記先行作業時に通過した複数の位置を時系列で示す位置情報を前記作業情報から特定し、前記位置情報から複数の前記先行走行ラインを特定する請求項7に記載の作業支援装置。
【請求項9】
前記制御装置は、
前記先行作業である防除作業を行う複数の前記先行走行ラインと、前記先行作業装置である防除装置により前記防除作業が行われた複数の作業位置とを特定し、
複数の前記先行走行ラインと複数の前記作業位置とに基づいて、複数の前記ブロックを区画する請求項7に記載の作業支援装置。
【請求項10】
前記制御装置は、
前記圃場情報から前記圃場の輪郭を成す複数の圃場辺と、前記圃場に形成された複数の畝の位置とを特定し、
複数の前記畝で栽培された作物の収穫作業を行う前記作業装置である収穫装置に関する装置情報を取得して、前記装置情報から前記収穫装置の作業幅と、前記作業車両の幅方向に対する前記収穫装置のオフセット位置とを含む相対位置とを特定し、
前記ブロックペア毎に前記畝の位置と前記作業幅と前記相対位置とに応じて前記作業車両を走行させながら前記収穫装置により前記収穫作業を行う前記作業ルートを作成する請求項1に記載の作業支援装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、圃場で作業車両を走行させながら作業車両に装備された作業装置により行う作業を支援する技術に関し、特に当該作業を行う作業ルート(作業経路)の作成に関する。
続きを表示(約 2,900 文字)
【背景技術】
【0002】
例えば特許文献1には、圃場で作業機(作業装置)により作業を行うために、作業機が装備された作業車両を自立走行させる自律走行システムが開示されている。当該自律走行システムは、作業車両に対する作業機の車幅方向のオフセット距離(偏心距離)及びオフセット方向(偏心方向)を設定する設定部と、作業車両を第1周回方向に周回させて内側領域に作業を行う内側作業経路を作成する内側作業経路作成部と、作業車両を第1周回方向とは反対の第2周回方向に周回させて、内側領域の外側を囲むように位置する外側領域に作業を行う外側作業経路を作成する外側作業経路作成部と、内側作業経路の内容と外側作業経路の内容と内側作業経路と外側作業経路の走行順序とを定めるための複数の経路作成モードから1の経路作成モードを選択するモード選択部と、を備えている。
【先行技術文献】
【特許文献】
【0003】
特開2021-81822号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
例えば特許文献1のように、内側領域に作業経路を作成した場合、内側領域の中央で前の直進部と次の直進部との間隔が狭くなるので、作業車両が当該前の直進部から次の直進部へと旋回しながら移動するときに切り返しを行わなければならず、作業効率が低下してしまう。特に、作業車両に牽引型の作業装置を装備して、作業車両から作業装置までの全長が長くなるほど、作業車両の切り返しが複雑になり、当該切り返しの回数が多くなり、作業効率が大きく低下してしまう。また、作業車両にオフセット型(幅方向に偏心したタイプ)の作業装置を装備した場合も同様に、作業車両の切り返しが複雑になり、当該切り返しの回数が多くなり、作業効率が低下してしまう。
【0005】
本発明は上記問題点に鑑み、圃場で作業車両を走行させながら作業装置により作業を効率的に行うことができる作業ルートを作成することを目的とする。
【課題を解決するための手段】
【0006】
上記の技術的課題を解決するための本発明の技術的手段は、次に示す点を特徴とする。
本発明の作業支援装置は、圃場を指定するための入力装置と、前記入力装置によって指定された前記圃場に関する圃場情報を取得する制御装置と、を備え、前記制御装置は、前記圃場情報で示される前記圃場の作業領域に複数のブロックを区画して、複数の前記ブロックから第1ブロックと当該第1ブロックに対して他ブロックで隔てられた第2ブロックとから成るブロックペアを繰り返し設定することで、複数の前記ブロックを複数の前記ブロックペアに組み分け、作業車両を走行させながら前記作業車両に装備された作業装置により、前記ブロックペア毎に前記第1ブロックと前記第2ブロックとに交互に作業を行う作業ルートを作成する。
【発明の効果】
【0007】
本発明によれば、圃場で作業車両を走行させながら作業装置により作業を効率的に行うことができる作業ルートを作成することが可能になる。
【図面の簡単な説明】
【0008】
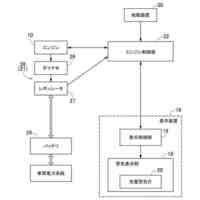
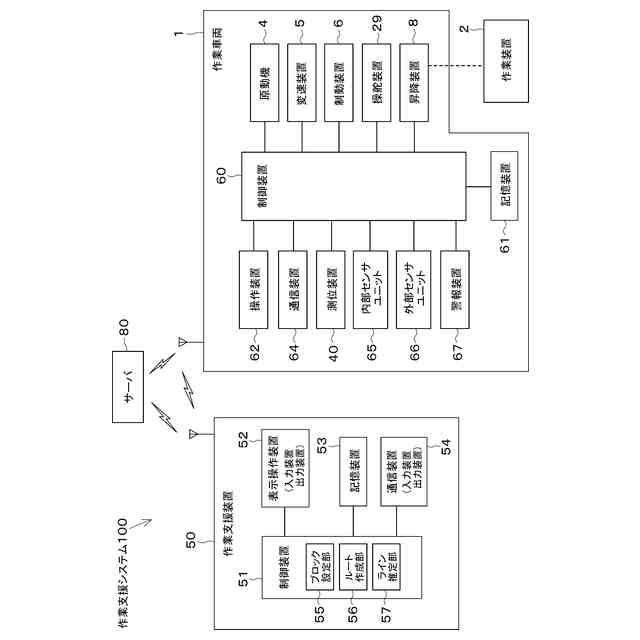
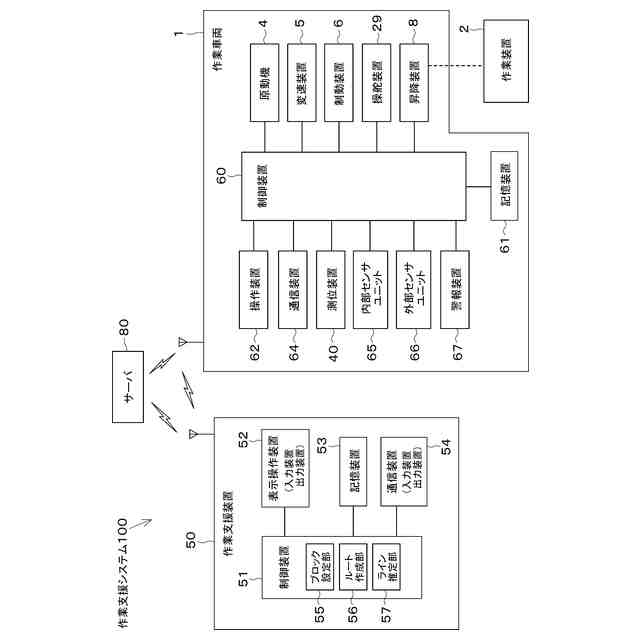
作業支援システムの構成図である。
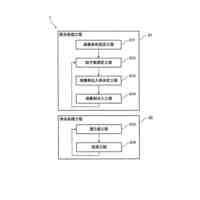
作業ルート作成処理の一例を示すフローチャートである。
作業情報が合成された圃場マップの一例を示す図である。
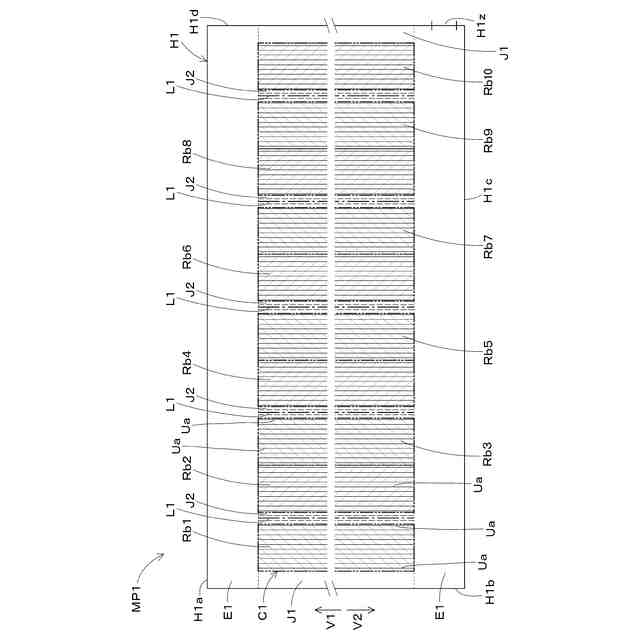
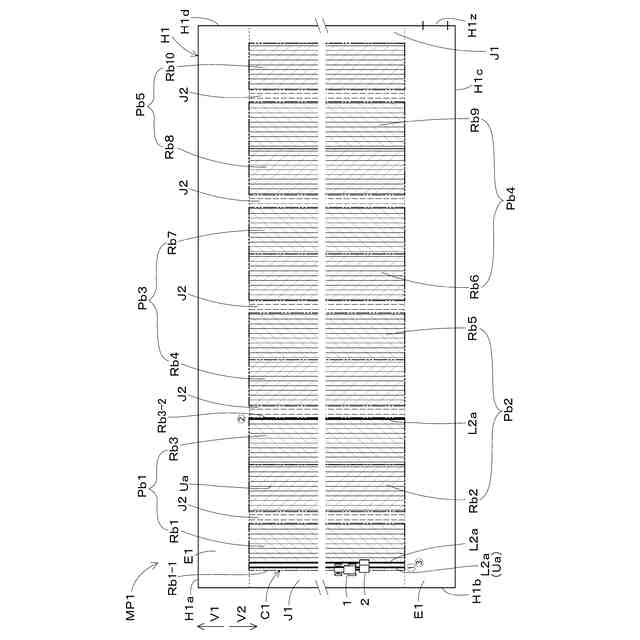
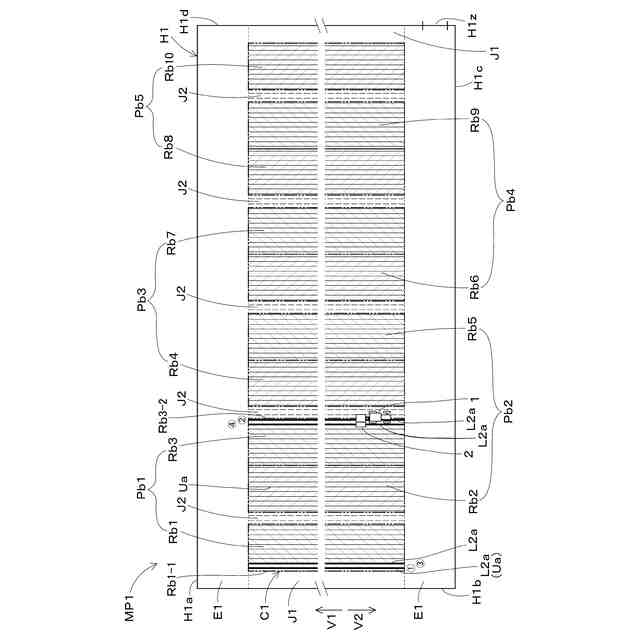
複数のブロックの一例を示す図である。
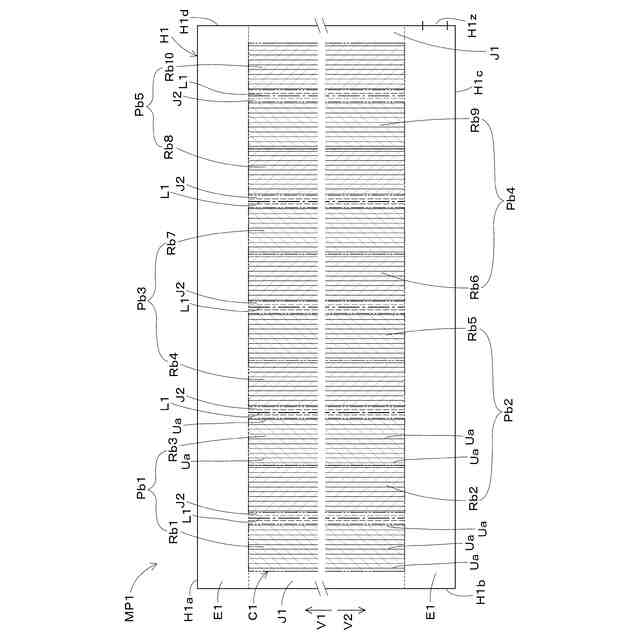
複数のブロックペアの一例を示す図である。
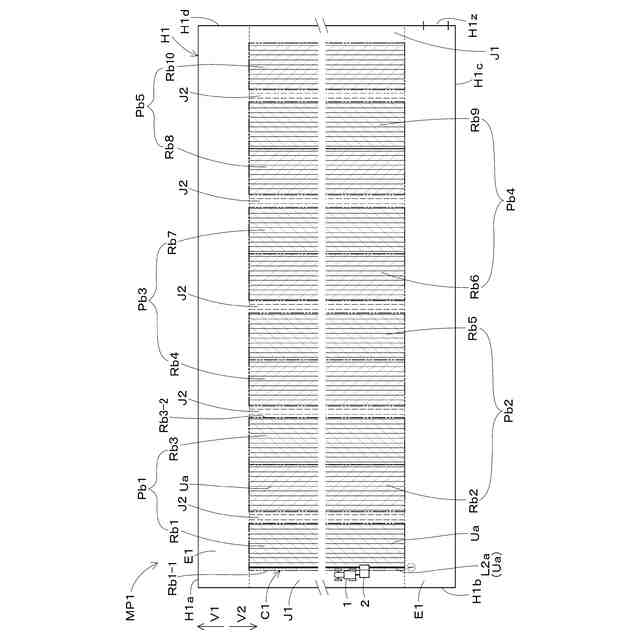
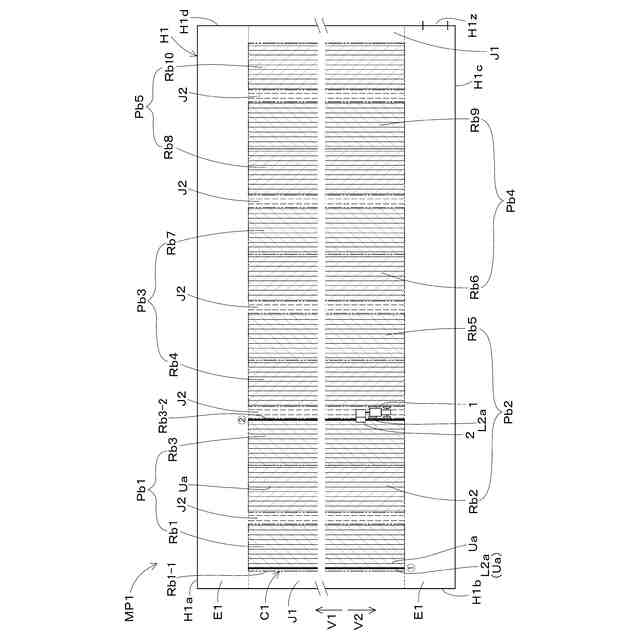
作業ルートの作成手順の一例を説明するための図である。
作業ルートの作成手順の一例を説明するための図である。
作業ルートの作成手順の一例を説明するための図である。
作業ルートの作成手順の一例を説明するための図である。
作業ルートの作成手順の一例を説明するための図である。
作業ルートの作成手順の一例を説明するための図である。
旋回ラインを含む作業ルートの一例を示す図である。
先行の防除作業の状態の一例を示す図である。
先行走行領域の作業ルートの一例を示す図である。
先行走行領域の作業ルートの一例を示す図である。
ブロックペアを成さない第3ブロックの一例を示す図である。
第3ブロックの作業ルートの一例を示す図である。
第1~3ブロックを含むブロックセットの作業ルートの一例を示す図である。
先行走行ラインの推定手順の一例を説明するための図である。
先行走行ラインの推定手順の一例を説明するための図である。
先行走行ラインの推定手順の一例を説明するための図である。
先行走行ラインの推定手順の一例を説明するための図である。
先行走行ラインの推定手順の一例を説明するための図である。
先行走行ラインの推定手順の一例を説明するための図である。
表示処理の一例を示すフローチャートである。
図14Aの続きのフローチャートである。
ライン特異表示処理の一例を示すフローチャートである。
軌跡表示処理の一例を示すフローチャートである。
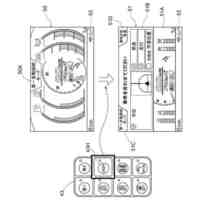
オートステアモードによる対応する案内画面の一例を示す図である。
オートステアモードによる作業中の案内画面の一例を示す図である。
オートステアモードによる作業停止中の案内画面の一例を示す図である。
オートステアモードによる作業中の案内画面の一例を示す図である。
ライン表示設定画面の一例を示す図である。
作業車両の車輪と畝の位置関係の一例を示す図である。
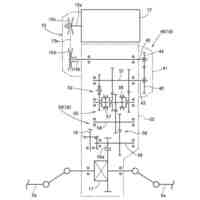
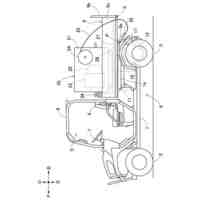
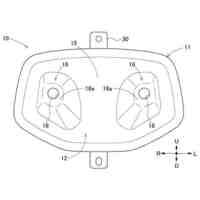
作業車両と作業装置の平面図である。
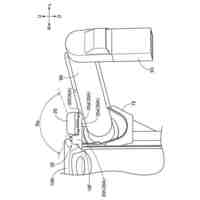
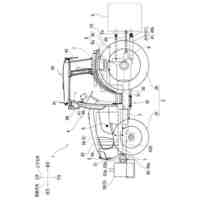
作業車両の側面図である。
【発明を実施するための形態】
【0009】
以下、本発明の実施の形態を図面に基づいて説明する。図21は、作業車両1の側面図である。作業車両1はトラクタから構成されている。本発明の作業車両は、トラクタに限定されず、その他の走行可能な他の作業車両或いは農業機械によって構成されてもよい。
【0010】
作業車両1は、車体(機体)3、原動機4、変速装置5、及び走行装置7を備えている。走行装置7は、左右一対で設けられ、車体3を支持している。走行装置7には、前輪7F、後輪7R、前後進切換機構、及び差動機構などが設けられている。前輪7F及び後輪7Rは、タイヤ型であるが、クローラ型であってもよい。原動機4は、ディーゼルエンジン或いは電動モータなどから構成されている。本実施形態では、原動機4はディーゼルエンジンにより構成されている。変速装置5は、変速によって走行装置7の推進力を切り替え可能であると共に、走行装置7の前進と後進を切り替え可能である。原動機4の駆動力が変速装置5により走行装置7に伝達されて、走行装置7が駆動することで、車体3が前後(前方A1、後方A2)に走行する。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社クボタ
作業車
1か月前
株式会社クボタ
作業車
1か月前
株式会社クボタ
作業車
21日前
株式会社クボタ
作業車
21日前
株式会社クボタ
作業車
23日前
株式会社クボタ
作業車
7日前
株式会社クボタ
作業機
29日前
株式会社クボタ
作業車
1か月前
株式会社クボタ
作業機
15日前
株式会社クボタ
作業車両
1か月前
株式会社クボタ
農業機械
7日前
株式会社クボタ
作業車両
21日前
株式会社クボタ
作業車両
21日前
株式会社クボタ
電動作業車
1か月前
株式会社クボタ
多目的車両
1か月前
株式会社クボタ
多目的車両
28日前
株式会社クボタ
竪型の反応炉
15日前
株式会社クボタ
車両用シート
28日前
株式会社クボタ
農作物測定装置
1か月前
株式会社クボタ
作業車及び座席
28日前
株式会社クボタ
作業支援システム
8日前
株式会社クボタ
鋳造用砂型の製造方法
15日前
株式会社クボタ
有機性廃棄物の処理方法
7日前
株式会社クボタ
ヘッドレスト及び作業車
7日前
株式会社クボタ
作業車両、作業支援システム
8日前
株式会社クボタ
鋳鋼品および鋳鋼品の製造方法
21日前
株式会社クボタ
作業支援装置、作業支援システム
8日前
株式会社クボタ
粘度測定方法および粘度測定装置
今日
株式会社クボタ
浄水処理方法および原水評価方法
7日前
株式会社クボタ
表示装置及び表示装置を備えた車両
1か月前
株式会社クボタケミックス
揚水装置、揚水装置を用いた施工方法
1か月前
株式会社クボタ
電動作業車両のバッテリ管理システム
21日前
株式会社クボタ
農業車両、農業車両の制御方法及びプログラム
1か月前
株式会社クボタ
作業支援装置、作業支援システム、ルート生成方法
8日前
株式会社クボタ
ルート生成装置、作業支援システム、ルート生成方法
8日前
株式会社クボタ
作業車
1か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ