TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025173255
公報種別
公開特許公報(A)
公開日
2025-11-27
出願番号
2024078754
出願日
2024-05-14
発明の名称
作業車両、作業支援システム
出願人
株式会社クボタ
代理人
安田岡本弁理士法人
主分類
A01B
69/00 20060101AFI20251119BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】作業車両を自動で走行させながら作業装置により作業を行う場合の利便性を向上させる。
【解決手段】作業車両は、作業装置が装備された車体を走行させる走行装置と、車体を操舵する操舵装置と、圃場の作業領域で作業装置により作業を行うための作業ルートに基づいて走行装置及び操舵装置を制御して、車体を自動で走行させる制御装置とを備え、制御装置は、作業ルートに基づいて圃場の非作業領域で車体の進行方向を自動で変える自動方向転換時に、作業領域への走行装置の進入を許容せずに、走行装置及び操舵装置によって車体を旋回させる第1旋回制御と、作業領域への前記走行装置の進入を許容しながら、走行装置及び操舵装置によって車体を旋回させる第2旋回制御とのうちのいずれかを、入力装置による入力情報に応じて選択して実行する。
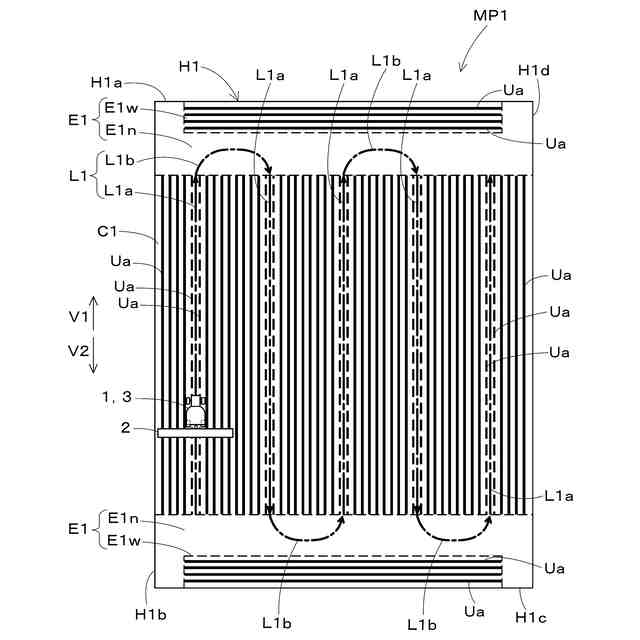
【選択図】図1
特許請求の範囲
【請求項1】
作業装置が装備された車体を走行させる走行装置と、
前記車体を操舵する操舵装置と、
圃場の作業領域で前記作業装置により作業を行うための作業ルートに基づいて前記走行装置及び前記操舵装置を制御して、前記車体を自動で走行させる制御装置と、を備え、
前記制御装置は、前記作業ルートに基づいて前記圃場の非作業領域で前記車体の進行方向を変える自動方向転換時に、前記作業領域への前記走行装置の進入を許容せずに、前記走行装置及び前記操舵装置によって前記車体を旋回させる第1旋回制御と、前記作業領域への前記走行装置の進入を許容しながら、前記走行装置及び前記操舵装置によって前記車体を旋回させる第2旋回制御とのうちのいずれかを、入力装置による入力情報に応じて選択して実行する作業車両。
続きを表示(約 1,800 文字)
【請求項2】
前記制御装置は、
前記作業領域の作業精度を優先することを示す情報が前記入力装置により入力された場合、前記自動方向転換時に前記第1旋回制御を実行し、
前記作業領域の作業精度を優先しないことを示す情報が前記入力装置により入力された場合、前記自動方向転換時に前記第2旋回制御を実行する請求項1に記載の作業車両。
【請求項3】
前記制御装置は、
前記圃場に関する圃場情報を取得して、前記圃場情報から前記圃場の中央に設けられた中央作業領域、前記圃場の端部に設けられた枕地、前記枕地に設けられた枕地作業領域、及び前記枕地に設けられ且つ前記中央作業領域と前記枕地作業領域との間に介在する前記非作業領域を特定し、
前記枕地作業領域の作業精度よりも前記中央作業領域の作業精度を優先することを示す中央優先情報が前記入力装置により入力された場合、前記自動方向転換時に、前記中央作業領域への前記走行装置の進入を許容せずに、前記枕地作業領域への前記走行装置の進入を許容する前記第1旋回制御を実行する請求項1に記載の作業車両。
【請求項4】
前記制御装置は、前記中央作業領域の作業精度よりも前記枕地作業領域の作業精度を優先することを示す枕地優先情報が前記入力装置により入力された場合、前記自動方向転換時に、前記枕地作業領域への前記走行装置の進入を許容せずに、前記中央作業領域への前記走行装置の進入を許容する前記第2旋回制御を実行する請求項3に記載の作業車両。
【請求項5】
前記制御装置は、
前記中央優先情報が入力され且つ、前記中央作業領域から前記枕地作業領域までの間隔である前記非作業領域の幅が所定値未満である場合、前記自動方向転換時に前記非作業領域及び前記枕地作業領域の一部で前記車体を旋回させ、
前記枕地優先情報が入力され且つ前記非作業領域の幅が前記所定値未満である場合、前記自動方向転換時に前記非作業領域及び前記中央作業領域の一部で前記車体を旋回させ、
前記中央優先情報及び前記枕地優先情報のいずれかが入力され且つ前記非作業領域の幅が前記所定値以上である場合、前記自動方向転換時に、前記枕地作業領域及び前記中央作業領域へ前記走行装置を進入させずに、前記非作業領域で前記車体を旋回させる請求項4に記載の作業車両。
【請求項6】
前記制御装置は、
前記作業ルートに含まれ且つ前記中央作業領域に設定された複数の作業ラインのそれぞれに沿って、前記車体を走行させながら前記作業装置により作業を行い、
前記中央優先情報が入力され且つ前記非作業領域の幅が前記所定値未満である場合、一の前記作業ラインの終点から次の前記作業ラインの始点に向かう前記車体の前記自動方向転換時に、前記第1旋回制御によって前記非作業領域及び前記枕地作業領域の一部で前記車体を切り返す請求項5に記載の作業車両。
【請求項7】
前記制御装置は、前記枕地優先情報が入力され且つ前記非作業領域の幅が前記所定値未満である場合、一の前記作業ラインの終点から次の前記作業ラインの始点に向かう前記車体の前記自動方向転換時に、前記第2旋回制御によって前記非作業領域及び前記中央作業領域の一部で前記車体を切り返す請求項6に記載の作業車両。
【請求項8】
前記制御装置は、前記第2旋回制御によって前記車体を切り返すときに、前記車体を次の前記作業ラインへ進入させず、且つ前記車体を一の前記作業ラインへ後退させる請求項7に記載の作業車両。
【請求項9】
前記制御装置は、前記中央優先情報が入力された場合、前記自動方向転換時に、前記中央作業領域に形成された畝を前記走行装置で踏み潰すことを許容せずに、前記枕地作業領域に形成された畝を前記走行装置で踏み潰すことを許容する前記第1旋回制御を実行する請求項3に記載の作業車両。
【請求項10】
前記制御装置は、前記枕地優先情報が入力された場合、前記自動方向転換時に、前記枕地作業領域に形成された畝を前記走行装置で踏み潰すことを許容せずに、前記中央作業領域に形成された畝を前記走行装置で踏み潰すことを許容する前記第2旋回制御を実行する請求項4に記載の作業車両。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、自動で走行しながら作業装置により作業を行う作業車両と、当該作業を支援する作業支援システムに関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
例えば特許文献1には、作業車両を自律走行させながら、作業車両に装備された作業装置により作業を行うための作業ルートを、圃場の中央にある内側領域と当該内側領域を囲む外側領域とに作成する自律走行システムが開示されている。当該自律走行システムにおいて、作業車両は、作業ルートに基づいて方向転換するときに、左右のいずれかへ旋回し、又は操舵方向と前後の進行方向とを切り換える切り返しを行う。
【先行技術文献】
【特許文献】
【0003】
特開2021-81822号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
作業車両が作業ルートに基づいて方向転換するときに、車輪などの走行装置が作業対象の領域に進入しないように旋回し又は切り返すと、当該領域の作業精度が確保され、便利である。しかし、方向転換用のスペースが狭い場合などには、作業車両の切り返しの回数が多くなり、作業車両の挙動が複雑になるため、作業時間が長くなり、作業車両を駆動するための燃料或いは電力が消費され、効率的ではなく、不便である。
【0005】
本発明は上記問題点に鑑み、作業車両を自動で走行させながら作業装置により作業を行う場合の利便性を向上させることを目的とする。
【課題を解決するための手段】
【0006】
上記の技術的課題を解決するための本発明の技術的手段は、次に示す点を特徴とする。
【0007】
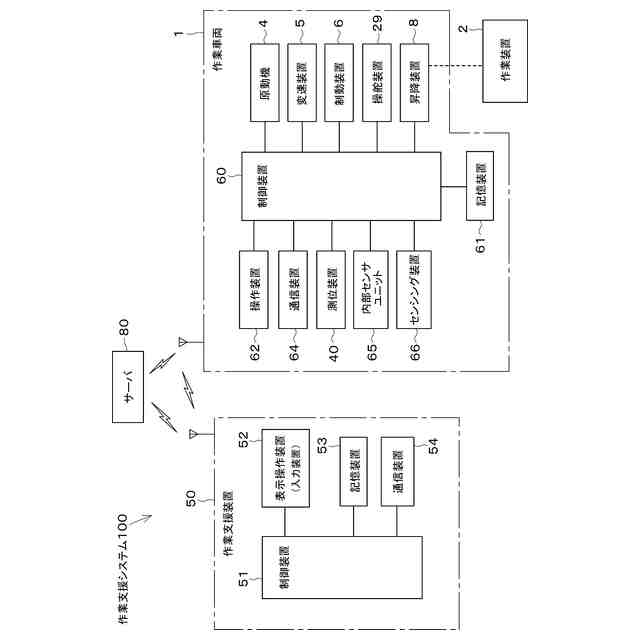
本発明の作業車両は、作業装置が装備された車体を走行させる走行装置と、前記車体を操舵する操舵装置と、圃場の作業領域で前記作業装置により作業を行うための作業ルートに基づいて前記走行装置及び前記操舵装置を制御して、前記車体を自動で走行させる制御装置と、を備えている。本発明の作業支援システムは、圃場で前記作業車両を自動で走行させながら前記作業車両に装備された前記作業装置により作業を行うことを支援する作業支援システムであって、前記作業車両と前記入力装置とを含んでいる。そして、前記制御装置は、前記作業ルートに基づいて作業対象外である非作業領域で前記車体の進行方向を自動で変える自動方向転換時に、前記作業領域への前記走行装置の進入を許容せずに、前記走行装置及び前記操舵装置によって前記車体を旋回させる第1旋回制御と、前記作業領域への前記走行装置の進入を許容しながら、前記走行装置及び前記操舵装置によって前記車体を旋回させる第2旋回制御とのうちのいずれかを、前記入力装置による入力情報に応じて選択して実行する。
【発明の効果】
【0008】
本発明によれば、圃場で作業車両が走行しながら作業装置により作業を行う場合の利便性を向上させることができる。
【図面の簡単な説明】
【0009】
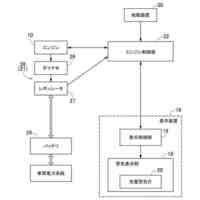
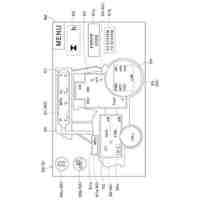
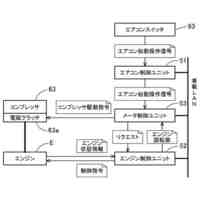
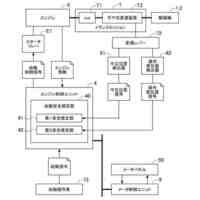
作業支援システムの構成図である。
圃場マップと作業ルートの一例を示す図である。
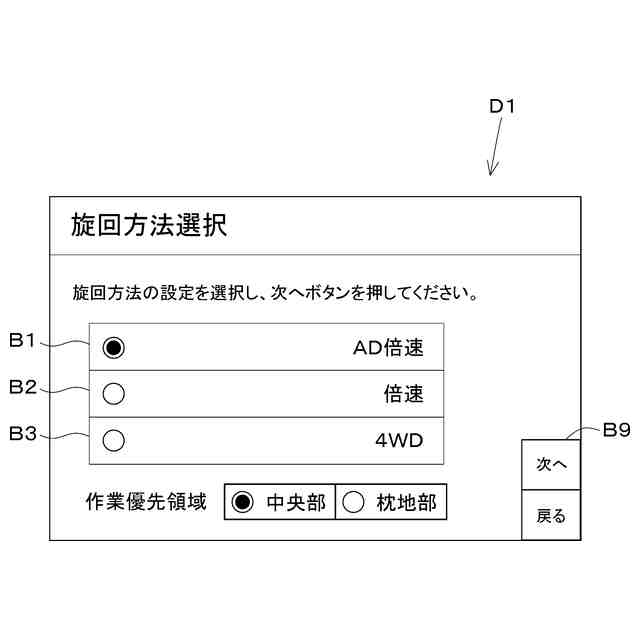
旋回方法選択画面の一例を示す図である。
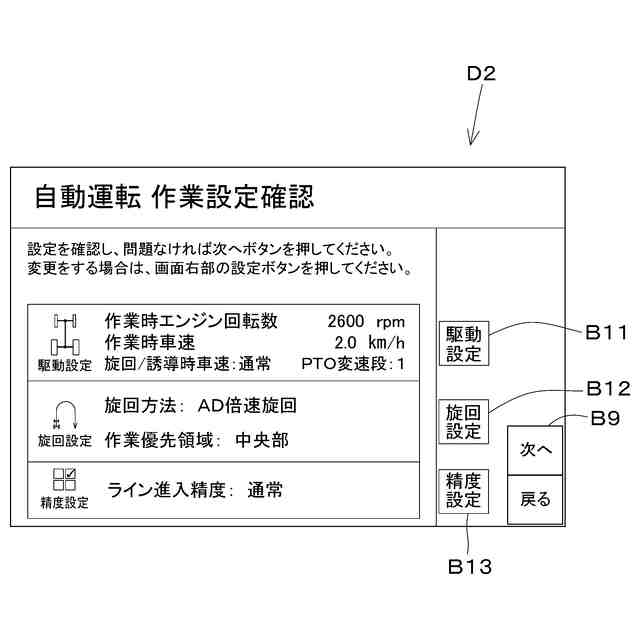
作業設定確認画面の一例を示す図である。
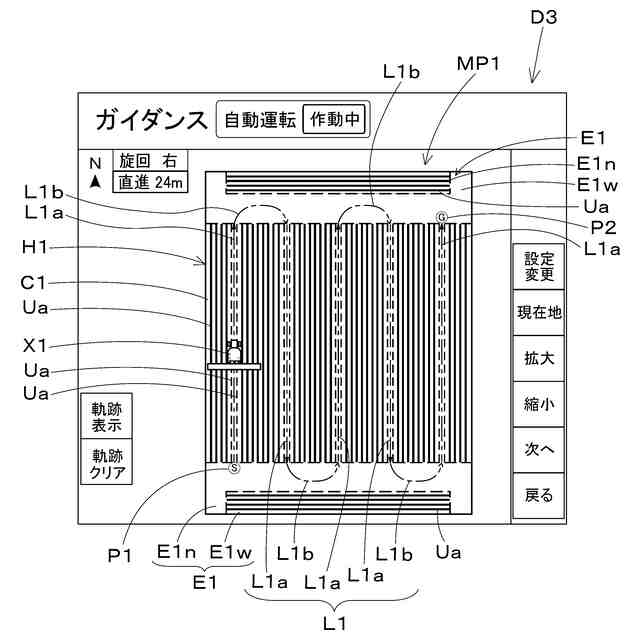
自動運転案内画面の一例を示す図である。
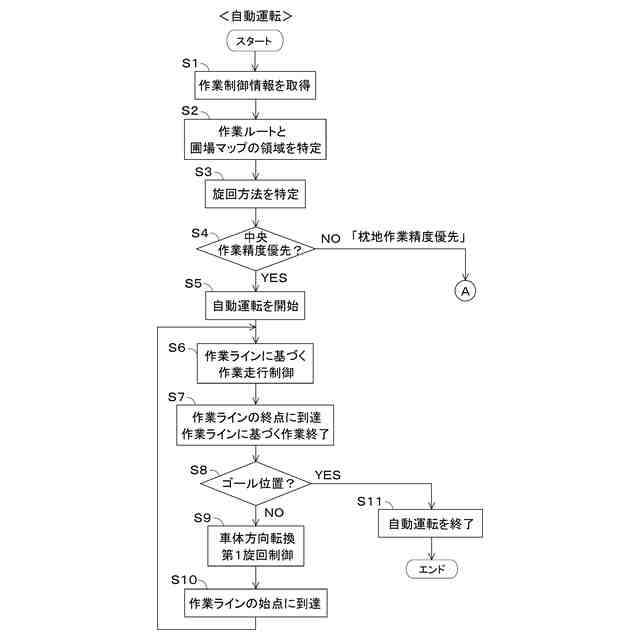
作業車両の自動運転時の処理の一例を示すフローチャートである。
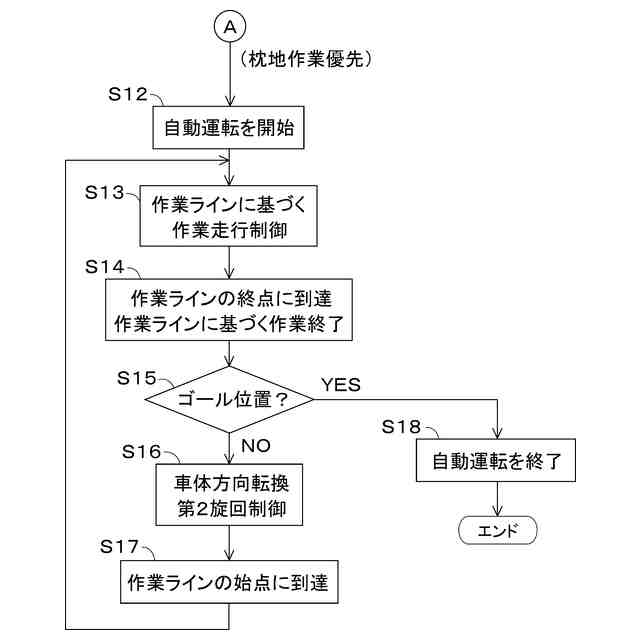
図6Aの続きのフローチャートである。
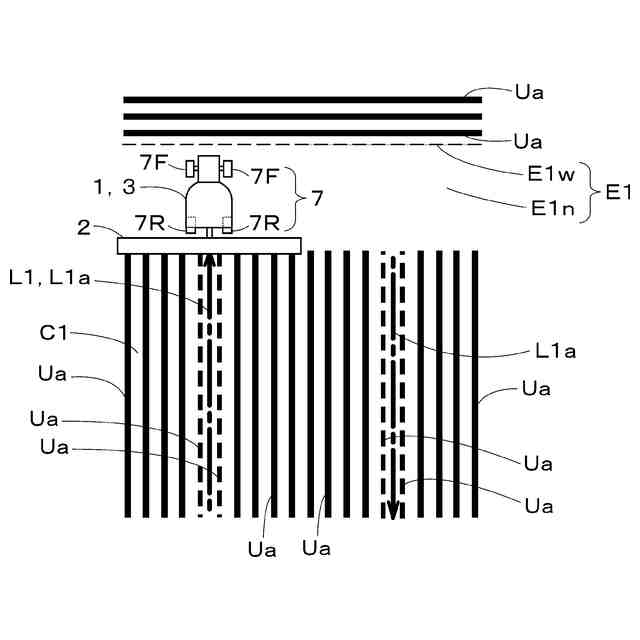
作業ラインに基づく作業終了直後の作業車両及び作業装置を示す図である。
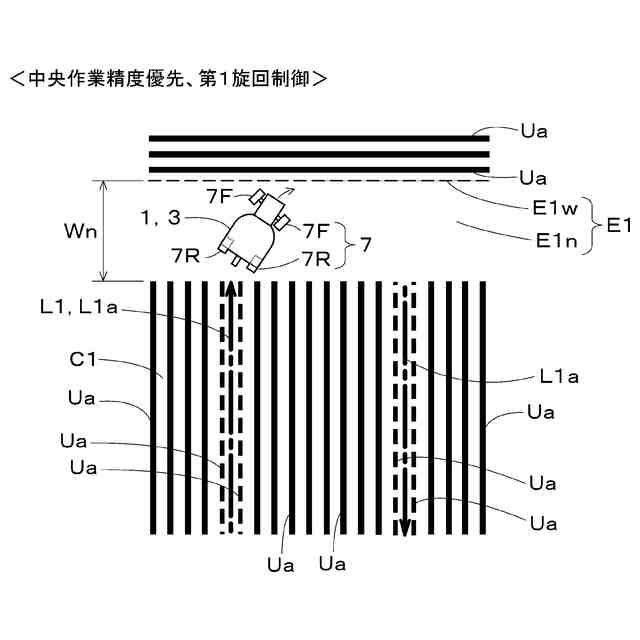
中央作業精度優先時の作業車両の第1旋回制御による方向転換状態の一例を示す図である。
中央作業精度優先時の作業車両の第1旋回制御による方向転換状態の一例を示す図である。
中央作業精度優先時の作業車両の第1旋回制御による方向転換状態の一例を示す図である。
中央作業精度優先時の作業車両の第1旋回制御による方向転換状態の一例を示す図である。
中央作業精度優先時の作業車両の第1旋回制御による方向転換状態の一例を示す図である。
中央作業精度優先時の作業車両の第1旋回制御による方向転換状態の一例を示す図である。
枕地作業精度優先時の作業車両の第2旋回制御による方向転換状態の一例を示す図である。
枕地作業精度優先時の作業車両の第2旋回制御による方向転換状態の一例を示す図である。
枕地作業精度優先時の作業車両の第2旋回制御による方向転換状態の一例を示す図である。
中央作業精度優先時の作業車両と牽引型作業装置の第1旋回制御による方向転換状態の一例を示す図である。
枕地作業精度優先時の作業車両と牽引型作業装置の第1旋回制御による方向転換状態の一例を示す図である。
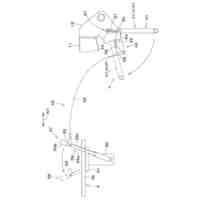
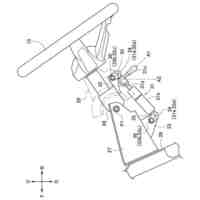
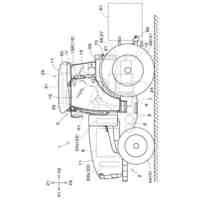
作業車両の一例を示す図である。
【発明を実施するための形態】
【0010】
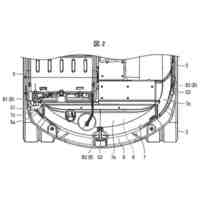
以下、本発明の実施の形態を図面に基づいて説明する。図12は、作業車両1の一例を示す側面図である。本実施形態の作業車両1は、トラクタから構成されている。然るに、本発明の作業車両は、トラクタに限定されず、その他の走行可能な他の農業機械或いは作業車両によって構成されてもよい。作業車両1は自律走行が可能である。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社クボタ
移植機
1か月前
株式会社クボタ
移植機
1か月前
株式会社クボタ
作業車
1か月前
株式会社クボタ
作業車
22日前
株式会社クボタ
作業車
1か月前
株式会社クボタ
作業車
1か月前
株式会社クボタ
作業車
1か月前
株式会社クボタ
作業機
28日前
株式会社クボタ
作業車
1か月前
株式会社クボタ
作業車
20日前
株式会社クボタ
作業車
1か月前
株式会社クボタ
作業車
1か月前
株式会社クボタ
作業車
1か月前
株式会社クボタ
作業車
1か月前
株式会社クボタ
作業車
1か月前
株式会社クボタ
作業車
1か月前
株式会社クボタ
作業車
20日前
株式会社クボタ
作業車
1か月前
株式会社クボタ
作業車
1か月前
株式会社クボタ
作業機
14日前
株式会社クボタ
作業機
2か月前
株式会社クボタ
作業車
2か月前
株式会社クボタ
作業車
6日前
株式会社クボタ
作業車
1か月前
株式会社クボタ
作業車
2か月前
株式会社クボタ
作業車
2か月前
株式会社クボタ
作業車両
2か月前
株式会社クボタ
作業車両
1か月前
株式会社クボタ
作業車両
1か月前
株式会社クボタ
作業車両
1か月前
株式会社クボタ
作業車両
20日前
株式会社クボタ
作業車両
1か月前
株式会社クボタ
作業車両
1か月前
株式会社クボタ
作業車両
2か月前
株式会社クボタ
作業車両
2か月前
株式会社クボタ
作業車両
2か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ