TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025173256
公報種別
公開特許公報(A)
公開日
2025-11-27
出願番号
2024078755
出願日
2024-05-14
発明の名称
ルート生成装置、作業支援システム、ルート生成方法
出願人
株式会社クボタ
代理人
安田岡本弁理士法人
主分類
A01B
69/00 20060101AFI20251119BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】作業車両を走行させながら作業装置により効率的に作業を行えるルートを提供する。
【解決手段】ルート生成装置は、圃場で作業車両を走行させながら前記作業車両に装備された作業装置により行う作業に関する作業情報を入力する入力装置と、前記圃場に関する圃場情報と前記作業情報とに基づいて、前記圃場の第1領域と当該第1領域によって隔離された第2領域及び第3領域にそれぞれ前記作業車両と前記作業装置により前記作業を行う複数の作業ルートを作成し、且つ前記第1領域と前記第2領域と前記第3領域との作業順に応じて、前記作業車両により前記作業装置を複数の前記作業ルートへ順次移動させる複数の移動ルートを作成する制御装置と、を備える。
【選択図】図1
特許請求の範囲
【請求項1】
圃場で作業車両を走行させながら前記作業車両に装備された作業装置により行う作業に関する作業情報を入力する入力装置と、
前記圃場に関する圃場情報と前記作業情報とに基づいて、前記圃場の第1領域と当該第1領域によって隔離された第2領域及び第3領域にそれぞれ前記作業車両と前記作業装置により前記作業を行う複数の作業ルートを作成し、且つ前記第1領域と前記第2領域と前記第3領域との作業順に応じて、前記作業車両により前記作業装置を複数の前記作業ルートへ順次移動させる複数の移動ルートを作成する制御装置と、を備えたルート生成装置。
続きを表示(約 1,700 文字)
【請求項2】
前記制御装置は、前記作業を行うことなく前記作業装置を移動させる複数の前記移動ルートを、前記圃場の非作業領域に作成する請求項1に記載のルート生成装置。
【請求項3】
前記制御装置は、前記作業車両により前記作業装置を複数の前記作業ルートのいずれかへ移動させながら、前記作業装置によって前記第1領域、前記第2領域、及び前記第3領域の少なくともいずれかに前記作業を行う移動兼作業ルートを、前記圃場の非作業領域、前記第1領域、前記第2領域、及び前記第3領域の少なくともいずれかに作成する請求項1に記載のルート生成装置。
【請求項4】
前記制御装置は、前記作業情報で示される前記作業順に応じて、複数の前記作業ルートのうちの先に前記作業を行う先作業ルートの終点から次に前記作業を行う次作業ルートの始点へと向かう前記移動ルートを作成する請求項1に記載のルート生成装置。
【請求項5】
前記制御装置は、前記圃場の出口及び入口の少なくともいずれかの位置と、前記第1領域と前記第2領域と前記第3領域との前記作業順とに応じて、複数の前記作業ルートのそれぞれの始点及び終点を決定し、複数の前記作業ルートの作業順を決定し、複数の前記移動ルートを作成し、複数の前記移動ルートの始点及び終点を決定する請求項1に記載のルート生成装置。
【請求項6】
前記制御装置は、前記圃場の中央領域と当該中央領域によって隔離された複数の枕地とにそれぞれ前記作業を行う複数の前記作業ルートを作成し、且つ前記中央領域と複数の前記枕地の作業順に応じて、前記作業車両により前記作業装置を複数の前記作業ルートへ順次移動させる複数の前記移動ルートを作成する請求項1に記載のルート生成装置。
【請求項7】
前記制御装置は、前記中央領域に前記作業を行う前記作業ルートと複数の前記枕地のそれぞれに前記作業を行う複数の前記作業ルートのうち、先に前記作業を行う先作業ルートから次に前記作業を行う次作業ルートへと、前記作業車両により前記作業装置を移動させる前記移動ルートを、前記圃場の非作業領域に作成する請求項6に記載のルート生成装置。
【請求項8】
前記制御装置は、前記中央領域に前記作業を行う前記作業ルートと複数の前記枕地のそれぞれに前記作業を行う複数の前記作業ルートのうち、先に前記作業を行う先作業ルートから次に前記作業を行う次作業ルートへと、前記作業車両により前記作業装置を移動させながら、前記作業装置によって前記中央領域及び複数の前記枕地の少なくともいずれかに前記作業を行う移動兼作業ルートを、前記圃場の非作業領域、前記中央領域、及び前記複数の前記枕地の少なくともいずれかに作成する請求項6に記載のルート生成装置。
【請求項9】
前記制御装置は、
前記中央領域の作業方向と複数の前記枕地の作業方向と前記作業装置の作業幅とに応じて、前記中央領域と複数の前記枕地のそれぞれに前記作業車両を走行させながら前記作業
装置により前記作業を行う複数の作業ラインを作成し、
前記圃場の出口及び入口の少なくともいずれかの位置と、前記第1領域と前記第2領域と前記第3領域との前記作業順とに応じて、複数の前記作業ラインのそれぞれの始点及び終点を決定し、複数の前記作業ラインの作業順を決定し、
前記中央領域と複数の前記枕地のそれぞれに対応する複数の前記作業ラインをそれぞれ含む複数の前記作業ルートを作成する請求項6に記載のルート生成装置。
【請求項10】
前記制御装置は、
前記中央領域と複数の前記枕地のうちの前記作業順が最後の領域に対応する前記作業ラインにおける前記出口に最も近い端点を、前記作業の終了位置に決定し、
前記終了位置から前記作業順の逆順で、複数の前記作業ラインの終点及び始点を決定し、複数の前記移動ルートを作成し、複数の前記移動ルートの終点及び始点を決定する請求項9に記載のルート生成装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、作業車両と作業車両に装備された作業装置とにより作業を行うルートを生成する技術に関する。
続きを表示(約 2,500 文字)
【背景技術】
【0002】
例えば特許文献1には、作業機(作業装置)が装備された作業車両を自律走行させる自律走行システムが開示されている。当該自律走行システムには、作業車両と無線通信端末とが含まれている。無線通信端末は、作業車両を第1周回方向に周回させて圃場の中央にある内側領域に作業を行う内側作業経路を作成する内側作業経路作成部と、作業車両を第1周回方向と反対の第2周回方向に周回させて、内側領域の外側を囲むように位置する外側領域に作業を行う外側作業経路を作成する外側作業経路作成部と、内側作業経路と外側作業経路の内容と走行順序とを定めるための複数の経路作成モードから1の経路作成モードを選択するモード選択部と、を備えている。作業車両の制御部は、無線通信端末から受信した内側作業経路と外側作業経路とのうち、先の作業経路に沿って車体を自律走行させながら作業機により作業を行った後、自律的に車体を切り返しながら旋回させることにより、車体の向きを180°反転させてから、次の作業経路に沿って車体を自律走行させる。
【先行技術文献】
【特許文献】
【0003】
特開2021-81822号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
圃場の複数の領域にそれぞれ作成された複数の作業経路のうち、先の作業経路から次の作業経路へと、作業車両及び作業装置をどのような経路で移動させればよいかを、現場で作業車両の制御部が判断するのは難しい。これは人間であっても判断するのが難しい。特に、複数の領域が遠く離れている場合、先の作業経路の終点と次の作業経路の始点とが遠く離れている場合、又は複数の領域が他の領域で隔離されている場合などには、先の作業経路から次の作業経路へと作業車両及び作業装置を移動させる移動経路を決定するのが非常に困難であり、移動経路の決定に時間がかかったり、移動経路が適切に決定されなかったりして、作業を効率的に行えないおそれがある。
【0005】
本発明は上記問題点に鑑み、作業車両を走行させながら作業装置により効率的に作業を行えるルートを提供することを目的とする。
【課題を解決するための手段】
【0006】
上記の技術的課題を解決するための本発明の技術的手段は、次に示す点を特徴とする。
【0007】
本発明のルート生成装置は、圃場で作業車両を走行させながら前記作業車両に装備された作業装置により行う作業に関する作業情報を入力する入力装置と、前記圃場に関する圃場情報と前記作業情報とに基づいて、前記圃場の第1領域と当該第1領域によって隔離された第2領域及び第3領域にそれぞれ前記作業車両と前記作業装置により前記作業を行う複数の作業ルートを作成し、且つ前記第1領域と前記第2領域と前記第3領域との作業順に応じて、前記作業車両により前記作業装置を複数の前記作業ルートへ順次移動させる複数の移動ルートを作成する制御装置と、を備える。また、本発明の作業支援装置は、圃場
で前記作業車両と前記作業装置により前記作業を行うことを支援する作業支援システムであって、前記入力ルート装置と前記制御装置とを備えている。
【0008】
また、本発明の作業支援装置は、圃場で前記作業車両と前記作業装置により前記作業を行うことを支援する作業支援システムであって、前記入力ルート装置と前記制御装置とを備えている。さらに、本発明のルート作成方法は、圃場で作業車両と前記作業車両に装備された作業装置により作業を行うためのルートを生成するルート生成方法であって、入力装置によって前記作業に関する作業情報を入力するステップと、制御装置によって前記圃場に関する圃場情報と前記作業情報とに基づいて、前記圃場の複数の領域にそれぞれ前記作業車両と前記作業装置により前記作業を行う複数の作業ルートを作成するステップと、前記制御装置によって複数の前記領域の作業順に応じて、前記作業車両により前記作業装置を複数の前記作業ルートへ順次移動させる複数の移動ルートを作成するステップと、を備えている。
【発明の効果】
【0009】
本発明によれば、作業車両を走行させながら作業装置により効率的に作業を行える作業ルート及び移動ルートを提供することができる。
【図面の簡単な説明】
【0010】
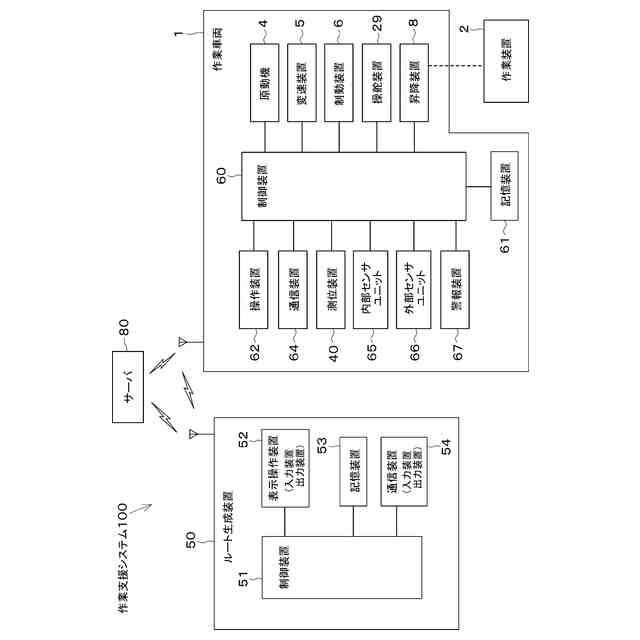
作業支援システムの構成図である。
圃場選択画面の一例を示す図である。
ルート作成画面の一例を示す図である。
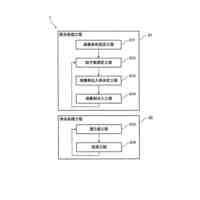
ルート生成処理の一例を示すフローチャートである。
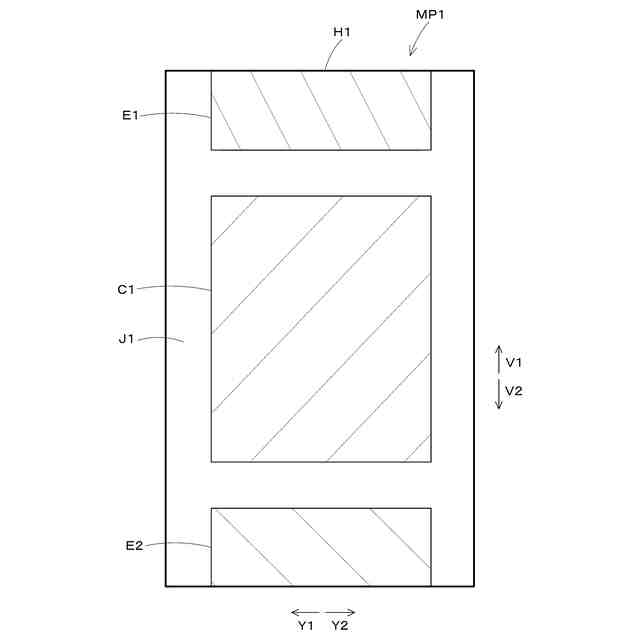
圃場の一例を示す図である。
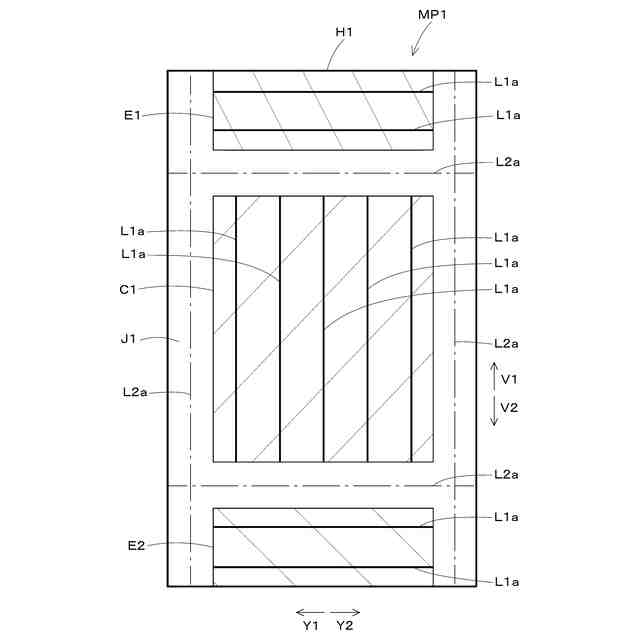
ルート作成手順の一例を示す図である。
ルート作成手順の一例を示す図である。
ルート作成手順の一例を示す図である。
ルート作成手順の一例を示す図である。
ルート作成手順の一例を示す図である。
ルート作成手順の一例を示す図である。
ルート作成手順の一例を示す図である。
作業ルート及び移動ルートが表示されたルート作成画面の一例を示す図である。
作業案内画面の一例作を示す図である。
移動ルート及び作業ルートの他の例を示す図である。
移動ルート及び作業ルートの他の例を示す図である。
移動兼作業ルートの一例を示す図である。
移動兼作業ルートの他の例を示す図である。
移動兼作業ルートの他の例を示す図である。
防除作業の場合の移動兼作業ルートの一例を示す図である。
防除作業の場合の移動兼作業ルートの他の例を示す図である。
防除作業の場合の移動兼作業ルートの他の例を示す図である。
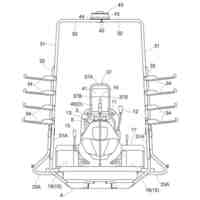
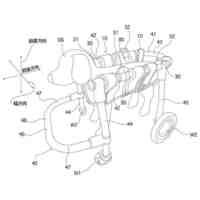
作業車両の一例を示す図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社クボタ
作業車
7日前
株式会社クボタ
農業機械
7日前
株式会社クボタ
作業支援システム
8日前
株式会社クボタ
鋳造用砂型の製造方法
15日前
株式会社クボタ
有機性廃棄物の処理方法
7日前
株式会社クボタ
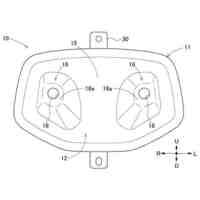
ヘッドレスト及び作業車
7日前
株式会社クボタ
作業車両、作業支援システム
8日前
株式会社クボタ
浄水処理方法および原水評価方法
7日前
株式会社クボタ
粘度測定方法および粘度測定装置
今日
株式会社クボタ
作業支援装置、作業支援システム
8日前
株式会社クボタ
作業支援装置、作業支援システム、ルート生成方法
8日前
株式会社クボタ
ルート生成装置、作業支援システム、ルート生成方法
8日前
株式会社クボタ
作業機
7日前
株式会社クボタ
移植機
7日前
株式会社クボタ
収穫機
7日前
株式会社クボタ
管路図作成支援装置、管路図作成支援方法、管路図作成支援用プログラム及び管路図作成支援システム
今日
株式会社長谷工コーポレーション
木造中空床を貫通する樹脂製配管の防火区画構造および防火スリーブ
7日前
株式会社長谷工コーポレーション
木造中空床を貫通する樹脂製排水集合管の防火区画構造および防火スリーブ
7日前
個人
産卵床
7日前
個人
草刈り鋏
1か月前
個人
釣り用錘
25日前
個人
平板植栽
8日前
個人
蠅捕獲器
1か月前
個人
果実袋
7日前
個人
噴霧器ノズル
23日前
個人
蜜蜂保護装置
1か月前
個人
養殖器具
7日前
個人
移動体草刈り機
7日前
個人
種子の製造方法
1か月前
個人
草刈機用回転刃
1か月前
個人
昆虫捕集器
1か月前
個人
水田排水量調整器具
7日前
個人
可動リップ付きルアー
28日前
株式会社剛樹
釣り竿
21日前
個人
四足動物用装着具
1か月前
井関農機株式会社
圃場作業機
28日前
続きを見る
他の特許を見る







 特許ウォッチ
特許ウォッチ