TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025171762
公報種別
公開特許公報(A)
公開日
2025-11-20
出願番号
2024077410
出願日
2024-05-10
発明の名称
検査システム、検査方法及びプログラム
出願人
三菱重工業株式会社
代理人
個人
,
個人
,
個人
,
個人
,
個人
主分類
G01N
29/265 20060101AFI20251113BHJP(測定;試験)
要約
【課題】モーションキャプチャシステムを用いた検査において、検査位置のローカル座標系における座標を算出し、検査データとともに記録する技術を提供する。
【解決手段】検査システムは、検査対象物における基準位置に第1マーカ部材を装着した針状プローブの先端を当てた状態で、モーションキャプチャシステムによって基準位置の座標を取得する手段と、検査用プローブに第2マーカ部材を装着し、モーションキャプチャシステムによって走査中の検査用プローブによる検査位置の座標を取得する手段と、トリガ信号を出力するトリガ発生器と、トリガ信号が出力されたときの検査位置の座標を、基準位置を基準とするローカル座標値に変換する手段と、トリガ信号が出力されたときに検査用プローブによって計測された検査データと、検査位置のローカル座標値とを対応付けて記憶部に記録する手段を備える。
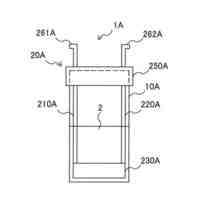
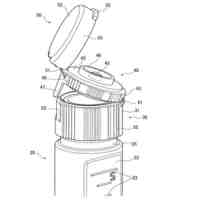
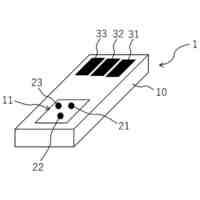
【選択図】図1
特許請求の範囲
【請求項1】
複数のカメラと、
モーションキャプチャシステムと、
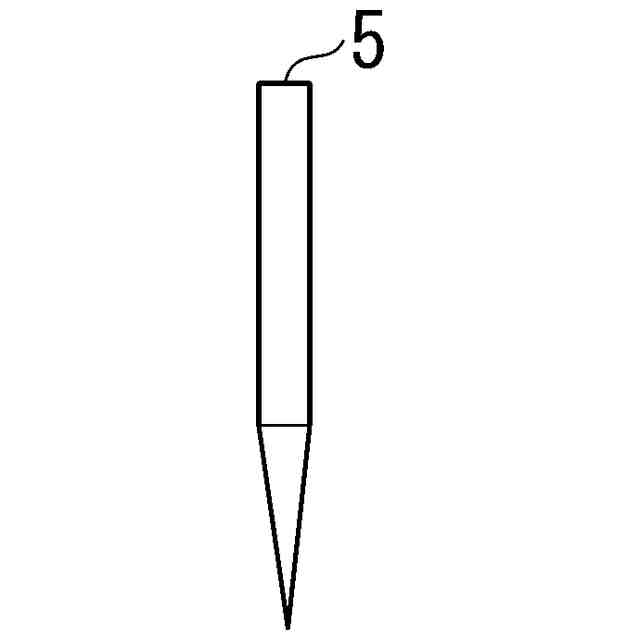
第1マーカ部材を装着した針状プローブと、
検査対象物における基準位置に、前記針状プローブの先端を当てた状態で、前記カメラによって前記針状プローブを撮影するとともに前記モーションキャプチャシステムによって前記針状プローブの先端位置を算出して前記基準位置の座標値を取得する手段と、
第2マーカ部材を装着した検査用プローブと、
前記検査対象物の表面上で走査する前記検査用プローブを前記カメラによって撮影するとともに前記モーションキャプチャシステムによって前記検査用プローブによる検査位置を算出して前記検査位置の座標値を取得する手段と、
トリガ信号を出力するトリガ発生器と、
前記トリガ信号が出力されたときの前記検査位置の座標値から、前記基準位置を基準とする前記検査位置のローカル座標値を算出する手段と、
前記トリガ信号が出力されたときに前記検査用プローブによって計測された検査データと、前記検査位置のローカル座標値とを対応付けて記憶部に記録する手段と、
を備える検査システム。
続きを表示(約 2,100 文字)
【請求項2】
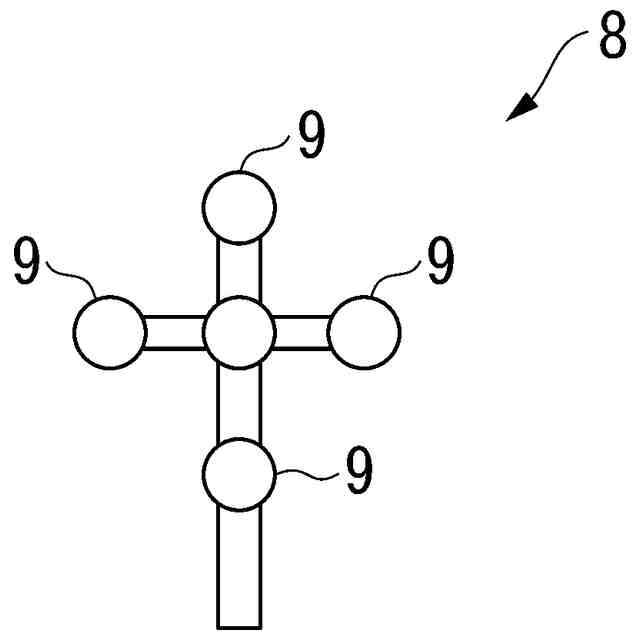
前記第1マーカ部材は、針状の先端を有する部材に3個以上のマーカが付されており、
前記第2マーカ部材には、前記第1マーカ部材と同数のマーカが前記第1マーカ部材と同じ位置関係で配置されている、
請求項1に記載の検査システム。
【請求項3】
前記第1マーカ部材は、前記針状プローブと前記検査用プローブの両方に着脱可能であり、前記第2マーカ部材は前記第1マーカ部材である、
請求項2に記載の検査システム。
【請求項4】
前記第1マーカ部材を前記検査用プローブに装着したときに、前記検査用プローブの先端と前記第1マーカ部材の先端との距離が所定の許容範囲内となるように装着可能である、
請求項3に記載の検査システム。
【請求項5】
前記基準位置の座標値を取得する手段は、前記検査対象物の外表面に刻印もしくは罫書きされた基準点に前記針状プローブの先端を押し当てて計測された前記基準点の座標値を取得するとともに、任意の識別情報を前記基準点に設定し、当該識別情報と取得した前記基準点の座標値とを前記記憶部に記録し、
前記ローカル座標値を算出する手段は、前記トリガ信号が出力されたときの前記検査位置の座標値から、最も近い前記基準点の座標値を基準とする前記検査位置のローカル座標値を算出する、
請求項1又請求項2に記載の検査システム。
【請求項6】
前記基準位置の座標を取得する手段は、所定の前記基準位置に固定された前記第1マーカ部材の座標値を取得し、
当該座標値が所定値以上変動すると、アラートを出力する手段、
をさらに備える請求項1または請求項2に記載の検査システム。
【請求項7】
前記検査対象物は、第1の検査範囲と第2の検査範囲を有し、
前記基準位置の座標値を取得する手段は、前記第1の検査範囲について、前記第1の検査範囲に属する前記基準位置の座標値とともに、前記第2の検査範囲に属する前記基準位置である第1の基準位置の座標値を取得し、前記第2の検査範囲について、前記第1の基準位置と同じ基準位置である第2の基準位置の座標値を取得し、
前記記録する手段によって記録された、前記第1の検査範囲に属する前記基準位置に基づく前記第1の検査範囲に属する前記検査位置のローカル座標値と、前記第2の検査範囲に属する前記基準位置に基づく前記第2の検査範囲に属する前記検査位置のローカル座標値と、を前記第1の基準位置の座標値と前記第2の基準位置の座標値とが重なるようにして統合する手段、
をさらに備える請求項1または請求項2に記載の検査システム。
【請求項8】
超音波検査装置をさらに備え、
前記検査用プローブが超音波プローブである、
請求項1または請求項2に記載の検査システム。
【請求項9】
検査対象物における基準位置に第1マーカ部材を装着した針状プローブの先端を当てた状態で、複数のカメラによって前記針状プローブを撮影し、モーションキャプチャシステムによって前記針状プローブの先端位置を算出して前記基準位置の座標値を取得するステップと、
前記検査対象物の表面上で走査する、第2マーカ部材を装着した検査用プローブを前記カメラによって撮影し、前記モーションキャプチャシステムによって前記検査用プローブによる検査位置を算出して前記検査位置の座標値を取得するステップと、
トリガ信号を取得するステップと、
前記トリガ信号が出力されたときの前記検査位置の座標値から、前記基準位置を基準とする前記検査位置のローカル座標値を算出するステップと、
前記トリガ信号が出力されたときに前記検査用プローブによって計測された検査データと、前記検査位置のローカル座標値とを対応付けて記憶部に記録するステップと、
を備える検査方法。
【請求項10】
コンピュータに、
検査対象物における基準位置に第1マーカ部材を装着した針状プローブの先端を当てた状態で、複数のカメラによって前記針状プローブを撮影するとともにモーションキャプチャシステムによって前記針状プローブの先端位置を算出して前記基準位置の座標値を取得するステップと、
前記検査対象物の表面上で走査する、第2マーカ部材を装着した検査用プローブを前記カメラによって撮影するとともに前記モーションキャプチャシステムによって前記検査用プローブによる検査位置を算出して前記検査位置の座標値を取得するステップと、
トリガ信号を取得するステップと、
前記トリガ信号が出力されたときの前記検査位置の座標値から、前記基準位置を基準とする前記検査位置のローカル座標値を算出するステップと、
前記トリガ信号が出力されたときに前記検査用プローブによって計測された検査データと、前記検査位置のローカル座標値とを対応付けて記憶部に記録するステップと、
を実行させるプログラム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、検査システム、検査方法及びプログラムに関する。
続きを表示(約 3,400 文字)
【背景技術】
【0002】
高い信頼性と安全性が求められるプラントでは、機器構造物の健全性を示すため、製造時や供用中に有資格者が溶接部を対象に超音波検査(UT:Ultrasonic Testing)を実施する。超音波検査では、基準となる試験片を用いて、付与した欠陥までの距離とエコー強度の関係性(DAC曲線)を把握し、記録すべきエコー強度(閾値)を定めておく。閾値を超える欠陥指示エコーが認められた場合には、超音波プローブの位置と指示エコーの情報を記録し、サイジングや反射源解析などの評価を適宜実施して、補修・交換の要否判断や保守計画などに活用する。被検体表面における超音波プローブの位置は、予め標準試験片を用いてプローブの入射点位置を求めておき、被検体表面上の入射点位置を記録する。入射点位置の記録方法は定められており、例えば、配管の周方向溶接部では、溶接線の両側に円周方向に等間隔で刻印している小さなへこみである低応力ポンチ(以下、ポンチ)から、2つのポンチ間に位置する溶接線の中央を基準位置として、溶接線と直交する方向(軸方向)の距離をy距離、ポンチを基準とした周方向の距離をx距離と定義して記録する。検査員が手動で検査する場合は、被検体表面に罫書き、直尺やメジャーを用いて計測し、x距離、y距離を測定して、記録する。構造物の形状・寸法に合わせて製作したスキャナに超音波プローブを装着して自動検査する場合は、ポンチや溶接線とスキャナ原点の相対位置を把握した上で測定と記録を行う。いずれの方法においても、被検体の外表面における位置は、外表面の特徴点を基準として位置を計測して記録することになる。
【0003】
プラント構造物は、多品種少量生産で比較的大型である。そのため、プラント構造物の超音波検査では、スキャナを使うことなく、また検査員の技量に依らず、精度よく自動で被検体外表面上の入射点位置と検査データを紐づけて記録する方法が求められている。解決方法の一つとして、非接触で広範囲の3次元計測が可能なモーションキャプチャ(MC:Motion Capture)システムやレーザトラッカーシステムの活用が考えられる。プローブの操作性やコストの観点からは、MCシステムを用いることが想定される。MCには光学式・慣性センサ式・機械式・磁気式などがある。現状最も位置精度が期待できるのは、赤外線カメラ(以下、カメラ)を用いた光学式MCである。例えば、複数のカメラでキャプチャ空間を構築し、反射マーカの位置をトラッキングする光学式MCシステムを用いることにより、2台以上のカメラの視野内にあるマーカの位置を三角測量により計測し、ユーザが設定する3次元座標上(ワールド座標系)に反映させることにより、ワールド座標系におけるマーカ位置をリアルタイムに把握することができる。なお、マーカ以外の物体の映り込みはノイズとなるため、画像処理する対象をマーカに絞って、可視光成分を排除することで位置精度を向上することができる。
【0004】
例えば、特許文献1には、MCシステムでフェーズドアレイ(PA)超音波プローブに取り付けたマーカ治具を認識し、プローブ位置をリアルタイムで算出し、当該位置の検査データを検査員がモニタで視認しつつ、位置データと検査データとを紐づけて記録するシステムが開示されている。しかし、特許文献1には、従来からの超音波検査で実施してきた、ポンチ位置や溶接線を基準とするローカル座標系(検査座標系)における検査プローブの位置情報を取得して記録することはできない。また、特許文献1に記載のシステムでは、ワールド座標系での検査位置を処理しているが、超音波検査のように被検体内部を計測する検査において、大まかな欠陥位置は把握できても、欠陥指示位置に精度が必要な検査記録を作成することには適していない。例えば、欠陥を検出し、補修が必要になった場合に、構造物内部のエコー分布に特徴がある検査データが示すワールド座標系における位置情報と、対象構造物の図面を照らし合わせるなどして補修位置を特定することになると思われるが、検査時の対象構造物における欠陥指示位置や指示を得たプローブ位置を再現することは難しいため、どうしても誤差が生じてしまい、補修位置を精度よく特定することが困難であると考えられる。
【先行技術文献】
【特許文献】
【0005】
米国特許出願公開第2018/0202798号明細書
【発明の概要】
【発明が解決しようとする課題】
【0006】
モーションキャプチャシステムを用いた検査において、検査位置のローカル座標系における座標を算出し、検査データとともに記録する技術が求められている。
【0007】
本開示は、上記課題を解決することができる検査システム、検査方法及びプログラムを提供する。
【課題を解決するための手段】
【0008】
本開示に係る検査システムは、複数のカメラと、モーションキャプチャシステムと、第1マーカ部材を装着した針状プローブと、検査対象物における基準位置に、前記針状プローブの先端を当てた状態で、前記カメラによって前記針状プローブを撮影するとともに前記モーションキャプチャシステムによって前記針状プローブの先端位置を算出して前記基準位置の座標を取得する手段と、第2マーカ部材を装着した検査用プローブと、前記検査対象物の表面上で走査する前記検査用プローブを前記カメラによって撮影するとともに前記モーションキャプチャシステムによって前記検査用プローブによる検査位置を算出して前記検査位置の座標を取得する手段と、トリガ信号を出力するトリガ発生器と、前記トリガ信号が出力されたときの前記検査位置の座標から、前記基準位置を基準とする前記検査位置のローカル座標値を算出する手段と、前記トリガ信号が出力されたときに前記検査用プローブによって計測された検査データと、前記検査位置のローカル座標値と、を対応付けて記憶部に記録する手段と、を備える。
【0009】
本開示に係る検査方法は、検査対象物における基準位置に、第1マーカ部材を装着した針状プローブの先端を当てた状態で、複数のカメラによって前記針状プローブを撮影し、モーションキャプチャシステムによって前記針状プローブの先端位置を算出して前記基準位置の座標を取得するステップと、前記検査対象物の表面上で走査する、第2マーカ部材を装着した検査用プローブを、前記カメラによって撮影し、前記モーションキャプチャシステムによって前記検査用プローブによる検査位置を算出して前記検査位置の座標を算出するステップと、トリガ信号を取得するステップと、前記トリガ信号が出力されたときの前記検査位置の座標から、前記基準位置を基準とする前記位置のローカル座標値を算出するステップと、前記トリガ信号が出力されたときに前記検査用プローブによって計測された検査データと、前記検査位置のローカル座標値と、を対応付けて記憶部に記録するステップと、を有する。
【0010】
本開示に係るプログラムは、コンピュータに、検査対象物における基準位置に、第1マーカ部材を装着した前記針状プローブの先端を当てた状態で、複数のカメラによって前記針状プローブを撮影するとともにモーションキャプチャシステムによって前記針状プローブの先端位置を算出して前記基準位置の座標を取得するステップと、前記検査対象物の表面上で走査する、第2マーカ部材を装着した検査用プローブを前記カメラによって撮影するとともに前記モーションキャプチャシステムによって前記検査用プローブによる検査位置を算出して前記検査位置の座標を取得するステップと、トリガ信号を取得するステップと、前記トリガ信号が出力されたときの前記検査位置の座標から、前記基準位置を基準とする前記検査位置のローカル座標値を算出するステップと、前記トリガ信号が出力されたときに前記検査用プローブによって計測された検査データと、前記検査位置のローカル座標値と、を対応付けて記憶部に記録するステップと、を実行させる。
【発明の効果】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
採尿及び採便具
22日前
日本精機株式会社
検出装置
16日前
個人
計量機能付き容器
11日前
甲神電機株式会社
電流検出装置
16日前
株式会社カクマル
境界杭
1日前
大成建設株式会社
風洞実験装置
11日前
双庸電子株式会社
誤配線検査装置
17日前
日本信号株式会社
距離画像センサ
14日前
日本特殊陶業株式会社
ガスセンサ
9日前
個人
非接触による電磁パルスの測定方法
14日前
大和製衡株式会社
組合せ計量装置
25日前
個人
計量具及び計量機能付き容器
11日前
大和製衡株式会社
組合せ計量装置
25日前
日東精工株式会社
振動波形検査装置
17日前
株式会社不二越
X線測定装置
14日前
個人
液位検視及び品質監視システム
9日前
キーコム株式会社
画像作成システム
1日前
株式会社エルメックス
希釈液収容容器
11日前
株式会社マグネア
磁界検出素子
14日前
理研計器株式会社
ガス検知装置
1日前
株式会社電巧社
試験装置及び試験方法
17日前
IMV株式会社
振動試験システム
14日前
住友化学株式会社
電気化学センサ
22日前
株式会社川島製作所
海苔の異物検査装置
7日前
合同会社画像技術研究所
カラーチャート
7日前
日本特殊陶業株式会社
化学センサ
16日前
株式会社アイシン
回転角検出装置
1日前
IMV株式会社
動電式振動発生装置
25日前
シチズンファインデバイス株式会社
外形検査装置
10日前
株式会社イシダ
計量装置
1日前
三菱電機株式会社
検査治具および検査装置
14日前
個人
試料霧化導入装置
15日前
株式会社鷺宮製作所
材料試験装置
15日前
株式会社トーキン
電流センサ装置
22日前
レーザーテック株式会社
光学装置及び計測方法
1日前
浜松ホトニクス株式会社
分光装置
14日前
続きを見る
他の特許を見る








 特許ウォッチ
特許ウォッチ