TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025169922
公報種別
公開特許公報(A)
公開日
2025-11-14
出願番号
2025075667
出願日
2025-04-30
発明の名称
フランジ接続部及びロボットアーム
出願人
ニューラ ロボティクス ゲーエムベーハー
,
NEURA ROBOTICS GMBH
代理人
個人
,
個人
,
個人
主分類
B25J
17/00 20060101AFI20251107BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
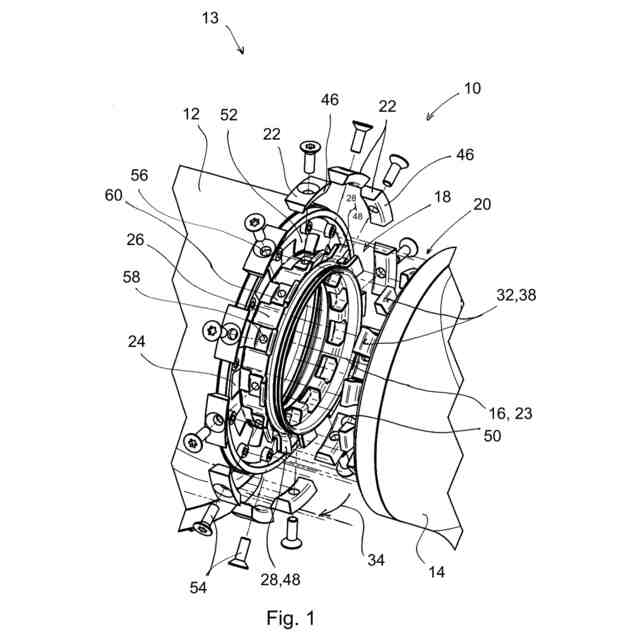
【課題】組立て及び調整が容易に可能で、軸方向に短い、ロボットアーム用フランジ接続部を提供する。
【解決手段】第1のロボットアーム部分を第2のロボットアーム部分に接続するためのフランジ接続部において、第1のフランジ要素と、第2のフランジ要素、少なくとも1つのクランプ体とを備え、第1のフランジ要素は、フランジ肩部と、少なくとも1つの第1の締付け延長部を有する第1のフランジ突出部とを含み、第2のフランジ要素は、第2の締付け延長部を有する少なくとも1つの第2のフランジ突出部を含み、第1のフランジ要素と第2のフランジ要素とは、少なくとも1つの第1の締付け延長部と第2の締付け延長部との間への、少なくとも1つのクランプ体の挿入によって、第2の締付け延長部とフランジ肩部との摩擦結合及び/又は形状結合を形成可能とするように、互いに配置されている。
【選択図】図1
特許請求の範囲
【請求項1】
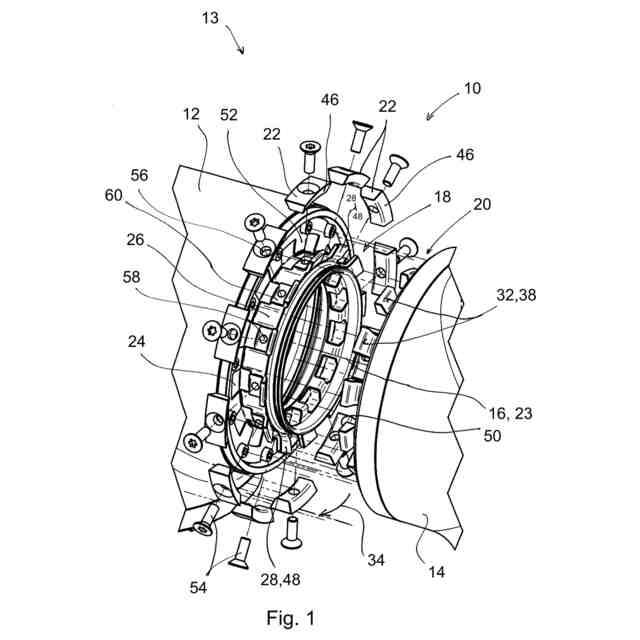
第1のロボットアーム部分(12)を第2のロボットアーム部分(14)に接続するためのフランジ接続部(10)であって、
フランジ長手軸線(16)と、第1のフランジ要素(18)と、第2のフランジ要素(20)と、少なくとも1つのクランプ体(22)と、を備え、
前記第1のフランジ要素(18)は、
フランジ肩部(24)と、
前記フランジ長手軸線(16)の方向に突出し、少なくとも1つの第1の締付け延長部(28)を有する第1のフランジ突出部(26)と、を含み、
前記第2のフランジ要素(20)は、
前記フランジ長手軸線(16)の方向に突出し、第2の締付け延長部(32)を有する少なくとも1つの第2のフランジ突出部(30)を含み、
前記第1のフランジ要素(18)と前記第2のフランジ要素(20)とは、
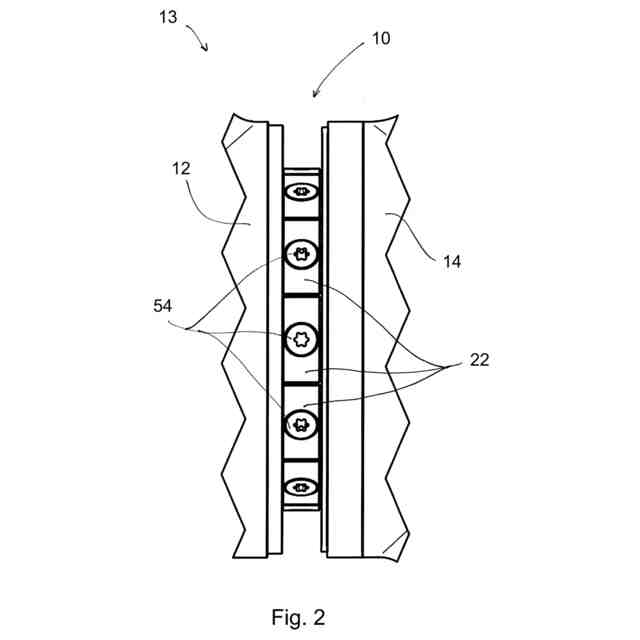
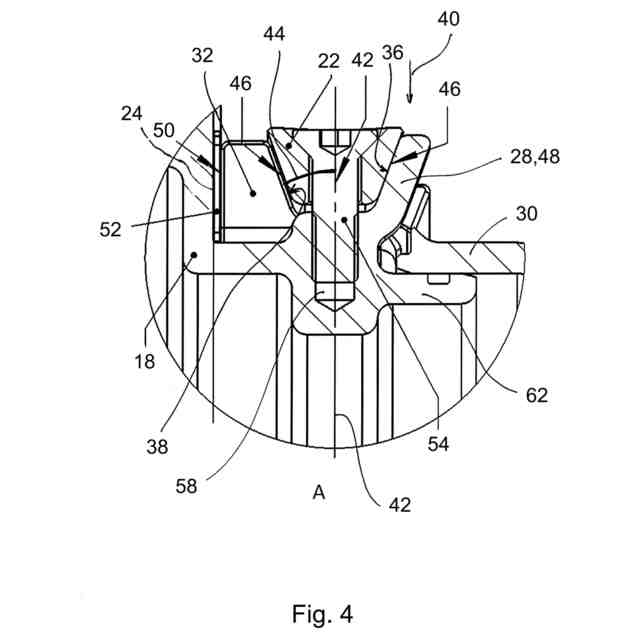
前記フランジ長手軸線(16)に関連して、前記第2の締付け延長部(32)が前記フランジ肩部(24)と前記少なくとも1つの第1の締付け延長部(28)との間に配置されるように、及び、
前記少なくとも1つの第1の締付け延長部(28)と前記第2の締付け延長部(32)との間への前記少なくとも1つのクランプ体(22)の挿入によって、前記第2の締付け延長部(32)と前記フランジ肩部(24)との摩擦結合及び/又は形状結合を形成可能とするように、互いに配置されている、フランジ接続部(10)。
続きを表示(約 1,500 文字)
【請求項2】
前記少なくとも1つのクランプ体(22)は、楔形に形成されていることを特徴とする、請求項1に記載のフランジ接続部。
【請求項3】
前記少なくとも1つの第1の締付け延長部(28)は、前記少なくとも1つのクランプ体(22)と協働するための第1の締付け面(36)を有し、
前記第2の締付け延長部(32)は、前記少なくとも1つのクランプ体(22)と協働するための第2の締付け面(38)を有し、
前記第1の締付け面(36)及び/又は前記第2の締付け面(38)は、前記少なくとも1つのクランプ体(22)の挿入方向(40)に配置された挿入軸線(42)と、0°~90°の間の、好ましくは10°~30°の間のクランプ角度(44)を成していることを特徴とする、請求項1又は2に記載のフランジ接続部。
【請求項4】
前記少なくとも1つの第1の締付け延長部(28)は、バネ舌状部(48)として形成されていることを特徴とする、請求項1~3のいずれか一項に記載のフランジ接続部。
【請求項5】
前記第2の締付け延長部(32)は、前記フランジ肩部(24)との前記摩擦結合及び/又は形状結合を形成するための、前記フランジ肩部(24)と平行に配置された肩部接触面(50)を有することを特徴とする、請求項1~4のいずれか一項に記載のフランジ接続部。
【請求項6】
前記フランジ接続部(10)は、前記フランジ肩部(24)と前記第2の締付け延長部(32)との間に配置された摩擦板(52)を備えることを特徴とする、請求項1~5のいずれか一項に記載のフランジ接続部。
【請求項7】
前記フランジ接続部(10)は、少なくとも1つのクランプネジ(54)を含み、
そのクランプネジ(54)を用いて、前記少なくとも1つのクランプ体(22)は、前記少なくとも1つの第1の締付け延長部(28)と前記第2の締付け延長部(32)との間に挿入可能であることを特徴とする、請求項1~6のいずれか一項に記載のフランジ接続部。
【請求項8】
前記第1のフランジ突出部(26)又は前記第2のフランジ突出部(30)は、前記少なくとも1つのクランプネジ(54)がネジ込まれる、少なくとも1つのネジ穴(58)を有することを特徴とする、請求項7に記載のフランジ接続部。
【請求項9】
前記少なくとも1つのクランプ体(22)は、互いに反対側に位置する2つの端部(64)と、これらの端部(64)の間に配置された中間部(66)とを有し、
前記少なくとも1つのクランプ体(22)は、
前記2つの端部(64)のそれぞれに前記少なくとも1つの第1の締付け延長部(28)のうちの1つが配置され、前記少なくとも1つの第2のフランジ突出部(30)のうちの1つが前記中間部(66)に配置されるように、
又は、
前記2つの端部(64)のそれぞれに前記少なくとも1つの第2のフランジ突出部(30)のうちの1つが配置され、前記少なくとも1つの第1の締付け延長部(28)のうちの1つが前記中間部(66)に配置されるように、配置されていることを特徴とする、請求項1~8のいずれか一項に記載のフランジ接続部。
【請求項10】
前記少なくとも1つの第1の締付け延長部(28)と前記少なくとも1つの第2のフランジ突出部(30)とは、前記フランジ長手軸線(16)の周りの周方向(34)において、交互に、及び/又は、互いに位置をずらして配置されていることを特徴とする、請求項1~9のいずれか一項に記載のフランジ接続部。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、第1のロボットアーム部分を第2のロボットアーム部分に接続するためのフランジ接続部、及びそのようなフランジ接続部を備えたロボットアームに関する。
続きを表示(約 2,300 文字)
【背景技術】
【0002】
特に、広義のハンドリング作業用に設計されたロボットは、通常、所定の作業を実行するために少なくとも1つのロボットアームを有している。そのようなロボットアームは、通常、複数のロボットアーム部分を含み、それらはロボットの組立ての際にフランジ接続部によって互いに結合される。これらのフランジ接続部は、ロボットアームに作用する静的及び動的な力と、モーメントとをロボットアーム部分間に伝達する。既存のロボットアームにおいては、そのために、ロボットアーム部分をロボットアーム長手軸線と平行に配置された複数のネジ接続部によって接続する、ネジフランジが使用される。
【0003】
ロボットアームに作用するモーメントをできるだけ小さくするため、ロボットアーム長手軸線に関連して、フランジ接続部をできるだけ短く形成することが求められている。そのため、既知のシステムにおいては、フランジ接続部の軸方向に隣接するスペースが非常に限られており、ネジ接続部の組立て性及び調整性が不十分となっている。
【発明の概要】
【発明が解決しようとする課題】
【0004】
本発明の課題は、その組立て及び調整が容易に可能である、ロボットアーム用の、軸方向に短いフランジ接続部を提供することにある。更に、本発明の課題は、そのロボットアーム部分の組立て及び調整が容易且つ安全に可能である、ロボットアームを提供することにある。
【課題を解決するための手段】
【0005】
これらの課題は、請求項1に記載の特徴を有するフランジ接続部と、請求項14に記載の特徴を有するロボットアームによって解決される。
本発明の有利な実施形態及び展開は、従属請求項に記載されている。
【0006】
本発明による、第1のロボットアーム部分を第2のロボットアーム部分に接続するためのフランジ接続部は、フランジ長手軸線と、第1のフランジ要素と、第2のフランジ要素と、少なくとも1つのクランプ体と、を含む。第1のフランジ要素は、フランジ肩部と、フランジ長手軸線の方向に突出し、少なくとも1つの第1の締付け延長部を有する第1のフランジ突出部と、を含む。フランジ長手軸線は、好ましくは、第1のロボットアーム部分及び/又は第2のロボットアーム部分のロボットアーム長手軸線と平行に、又は同一に形成される。第1のフランジ要素は一体に形成することができる。第2のフランジ要素は、フランジ長手軸線の方向に突出し、第2の締付け延長部を有する少なくとも1つの第2のフランジ突出部を含む。好ましくは、第2のフランジ突出部は、第1のフランジ突出部と反対の方向に第2のフランジ要素から突出する。
【0007】
本発明によれば、第1のフランジ要素と第2のフランジ要素とは、フランジ長手軸線に関連して、第2の締付け延長部が、フランジ肩部と少なくとも1つの第1の締付け延長部との間に配置されるように、及び、少なくとも1つの第1の締付け延長部と第2の締付け延長部との間への、少なくとも1つのクランプ体の挿入によって、第2の締付け延長部とフランジ肩部との摩擦結合及び/又は形状結合を形成可能とするように、互いに配置されている。フランジ長手軸線に関連して、少なくとも1つのクランプ体は、好ましくは、少なくとも1つの第1の締付け延長部と第2の締付け延長部との間に配置されている。それによって、フランジ接続部は、フランジ長手軸線に関連して、小さな設置スペース要件によって実現できる。少なくとも1つの挿入可能なクランプ体を設けることによって、更に、第1のフランジ要素を第2のフランジ要素に接続する際の組立て作業を、フランジ長手軸線によって規定される方向から切り離すことができる。更に、少なくとも1つのクランプ体を設けることは、特にクランプ力に基づいたフランジ接続部の容易な調整を提供できる。好ましくは、少なくとも1つのクランプ体は、フランジ長手軸線に対して垂直に挿入可能に配置されている。
【0008】
好ましくは、少なくとも1つのクランプ体は楔形に形成されている。それによって、少なくとも1つの第1の締付け延長部と第2の締付け延長部との間における少なくとも1つのクランプ体の挿入深さの選択によって、フランジ接続部を決定することができる。楔形に形成されているため、少なくとも1つのクランプ体は、好ましくは台形の断面を有する。
【0009】
好ましくは、少なくとも1つの第1の締付け延長部は、少なくとも1つのクランプ体と協働するための第1の締付け面を有し、第2の締付け延長部は、少なくとも1つのクランプ体と協働するための第2の締付け面を有し、その際、第1の締付け面及び/又は第2の締付け面は、少なくとも1つのクランプ体の挿入方向に配置された挿入軸線と、0°~90°の間の、特に好ましくは10°~30°の間のクランプ角度を成している。特に、少なくとも1つのクランプ体が楔形に形成されている場合、第1の締付け面又は第2の締付け面に接するクランプ体のクランプ面は、好ましくは、それぞれ対応する締付け面と平行に形成されている。
【0010】
少なくとも1つの第1の締付け延長部は、バネ舌状部(Federzunge)として形成することができる。それによって、フランジ接続部の調整性を向上することができる。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
折りたたみ工具
2か月前
個人
フラワーホッチキス。
1か月前
個人
手持ち挟持具
15日前
株式会社三協システム
製函機
2か月前
川崎重工業株式会社
ロボット
1か月前
株式会社不二越
ロボット
1か月前
トヨタ自動車株式会社
学習装置
今日
株式会社三協システム
移載装置
2か月前
CKD株式会社
把持装置
2か月前
株式会社竹中工務店
補助セット
1か月前
川崎重工業株式会社
ハンド
1か月前
株式会社ミクロブ
把持装置
2か月前
SMC株式会社
着脱装置
2か月前
株式会社マキタ
ハンマドリル
24日前
株式会社マキタ
ハンマドリル
24日前
太陽パーツ株式会社
アシストスーツ
2か月前
株式会社不二越
移動ロボットシステム
1か月前
工機ホールディングス株式会社
作業機
1か月前
トヨタ自動車株式会社
ロボット
1か月前
株式会社不二越
ロボットシステム
2か月前
株式会社不二越
ロボットシステム
2か月前
本田技研工業株式会社
装置
1か月前
株式会社不二越
エッジ仕上げ装置
2か月前
株式会社安川電機
ロボット
21日前
川崎重工業株式会社
塗装システム
1か月前
トヨタ自動車株式会社
軌道生成装置
1か月前
株式会社三共コーポレーション
工具保持具
15日前
株式会社不二越
垂直多関節ロボット
今日
株式会社不二越
垂直多関節ロボット
2か月前
トヨタ自動車株式会社
歩行ロボット
2か月前
トヨタ自動車株式会社
ロボットハンド
21日前
アネックスツール株式会社
ドライバービット
1か月前
工機ホールディングス株式会社
作業機
1か月前
大和ハウス工業株式会社
ねじ回転工具
2か月前
ライオン株式会社
移載システム
2か月前
シンフォニアテクノロジー株式会社
搬送装置
1か月前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ


































