TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025168201
公報種別
公開特許公報(A)
公開日
2025-11-07
出願番号
2024188191,2024072901
出願日
2024-10-25,2024-04-26
発明の名称
制御装置、制御方法、及びプログラム
出願人
株式会社CoLab
代理人
弁理士法人キュリーズ
主分類
B25J
19/02 20060101AFI20251030BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】ロボット装置をより適切に制御することを可能とする。
【解決手段】制御装置は、ロボット装置の動作状態を目標状態から前記目標状態とは異な
る任意状態へ変更する逆方向動作を実行させるための制御指令を生成する動作生成部と、
前記ロボット装置の動作状態に関する測定を行うためのセンサを用いて得られる測定情報
を取得する取得部と、前記制御指令に従った前記逆方向動作の実行中に、当該制御指令と
前記測定情報とのセットを含むデータを繰り返し収集するデータ収集部と、を備え、前記
センサは、視覚センサ及び力覚センサの少なくとも一方を含む。
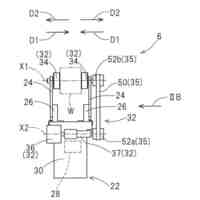
【選択図】図2
特許請求の範囲
【請求項1】
ロボット装置の動作状態を目標状態から前記目標状態とは異なる任意状態へ変更する逆
方向動作を実行させるための制御指令を生成する動作生成部と、
前記ロボット装置の動作状態に関する測定を行うためのセンサを用いて得られる測定情
報を取得する取得部と、
前記制御指令に従った前記逆方向動作の実行中に、当該制御指令と前記測定情報とのセ
ットを含むデータを繰り返し収集するデータ収集部と、を備え、
前記センサは、視覚センサ及び力覚センサの少なくとも一方を含む
制御装置。
続きを表示(約 1,600 文字)
【請求項2】
前記動作生成部は、前記ロボット装置の動作状態を前記目標状態から互いに異なる複数
の任意状態に変更する複数パターンの逆方向動作を実行させるための前記制御指令を生成
し、
前記データ収集部は、前記複数パターンの逆方向動作のそれぞれについて前記データを
繰り返し収集する
請求項1に記載の制御装置。
【請求項3】
前記動作生成部は、
前記目標状態に近い領域ほど前記データの収集量が多くなる前記制御指令を生成し、
前記目標状態から遠い領域ほど前記データの収集量が少なくなる前記制御指令を生成
する
請求項1に記載の制御装置。
【請求項4】
前記取得部は、
前記目標状態に近い領域ほど前記測定情報の取得量が多くなるよう取得周期を短縮し
、
前記目標状態から遠い領域ほど前記測定情報の取得量が多くなるよう取得周期を延長
する
請求項1に記載の制御装置。
【請求項5】
前記取得部は、前記目標状態で得られる目標測定情報と、前記逆方向動作の実行中に得
られる現在測定情報と、の差分を相対測定情報として取得し、
前記データ収集部は、前記制御指令に従った前記逆方向動作の実行中に、当該制御指令
と前記相対測定情報とのセットを含む前記データを繰り返し収集する
請求項1に記載の制御装置。
【請求項6】
前記取得部は、前記センサの出力又は前記制御指令に応じて前記ロボット装置に関する
速度関係値を含む前記測定情報を取得し、
前記データ収集部は、前記制御指令に従った前記逆方向動作の実行中に、当該制御指令
と、前記速度関係値を含む前記測定情報と、のセットを含む前記データを繰り返し収集す
る
請求項1に記載の制御装置。
【請求項7】
前記データ収集部が収集した前記データに基づいて、前記ロボット装置を用いた作業を
行うための設定情報を取得する設定取得部と、
前記設定情報を用いて、前記作業を行うための制御を前記ロボット装置に対して行う制
御部と、さらに備える
請求項1乃至6のいずれか1項に記載の制御装置。
【請求項8】
前記設定取得部は、前記データ収集部が収集した前記データを学習用データとして用い
て、前記測定情報から前記制御指令を導出するための学習済みモデルを含む前記設定情報
を機械学習により取得し、
前記制御部は、前記学習済みモデルを含む前記設定情報を用いて、前記作業中に得られ
る前記測定情報に基づいて前記制御を行う
請求項7に記載の制御装置。
【請求項9】
前記センサは、前記視覚センサ及び前記力覚センサを含み、
前記設定取得部は、前記視覚センサを用いて得られる視覚測定情報による前記制御であ
る視覚制御と、前記力覚センサを用いて得られる力覚測定情報による前記制御である力覚
制御と、の制御比率を設定するための情報を含む前記設定情報を取得し、
前記制御部は、前記設定情報を用いて、前記ロボット装置を用いた作業の状況に応じて
前記制御比率を動的に又は段階的に変更する
請求項7に記載の制御装置。
【請求項10】
前記制御部は、
前記作業中に得られる前記測定情報又は制御指令から前記ロボット装置に関する速度
関係値を導出し、
前記設定情報及び前記測定情報に基づいて、前記速度関係値と速度関係目標値との差
分を減少させる制御を前記ロボット装置に対して繰り返し行う
請求項7に記載の制御装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、ロボット装置を制御する制御装置、制御方法、及びプログラムに関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
従来、ロボット装置を制御する制御装置が広く用いられている。このような制御装置に
おいて、視覚センサ及び力覚センサを用いてロボット装置の動作状態を測定すると共に、
ロボット装置の動作状態を目標状態にするよう制御する技術が知られている(例えば、特
許文献1参照)。
【0003】
また、従来、ロボット装置の動作を学習する方法として、ロボット装置を人手で動かし
て、実行させる一連の動作を記録するティーチングが採用されている。
【先行技術文献】
【特許文献】
【0004】
特許第7295344号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
従来技術では、作業の環境及び/又は対象物が少しでも変化した場合には、新たにティ
ーチングを行う必要がある。そのため、従来技術では、ロボット装置の動作の制御に利用
可能なデータを効率的に収集することが難しい。
【0006】
本開示は、ロボット装置をより適切に制御することを可能とする制御装置、制御方法、
及びプログラムを提供する。
【課題を解決するための手段】
【0007】
本開示の第1の態様に係る制御装置は、ロボット装置の動作状態を目標状態から前記目
標状態とは異なる任意状態へ変更する逆方向動作を実行させるための制御指令を生成する
動作生成部と、前記ロボット装置の動作状態に関する測定を行うためのセンサを用いて得
られる測定情報を取得する取得部と、前記制御指令に従った前記逆方向動作の実行中に、
当該制御指令と前記測定情報とのセットを含むデータを繰り返し収集するデータ収集部と
、を備え、前記センサは、視覚センサ及び力覚センサの少なくとも一方を含む。
【0008】
本開示の第2の態様に係る制御方法は、ロボット装置の動作状態を目標状態から前記目
標状態とは異なる任意状態へ変更する逆方向動作を実行させるための制御指令を生成する
ことと、前記ロボット装置の動作状態に関する測定を行うためのセンサを用いて得られる
測定情報を取得することと、前記制御指令に従った前記逆方向動作の実行中に、当該制御
指令と前記測定情報とのセットを含むデータを繰り返し収集することと、を有し、前記セ
ンサは、視覚センサ及び力覚センサの少なくとも一方を含む。
【0009】
本開示の第3の態様に係るプログラムは、制御装置に、ロボット装置の動作状態を目標
状態から前記目標状態とは異なる任意状態へ変更する逆方向動作を実行させるための制御
指令を生成することと、前記ロボット装置の動作状態に関する測定を行うためのセンサを
用いて得られる測定情報を取得することと、前記制御指令に従った前記逆方向動作の実行
中に、当該制御指令と前記測定情報とのセットを含むデータを繰り返し収集することと、
を実行させ、前記センサは、視覚センサ及び力覚センサの少なくとも一方を含む。
【発明の効果】
【0010】
本開示の一態様によれば、ロボット装置をより適切に制御することを可能とする制御装
置、制御方法、及びプログラムを提供できる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
フラワーホッチキス。
1か月前
個人
手持ち挟持具
16日前
川崎重工業株式会社
ロボット
1か月前
株式会社竹中工務店
補助セット
1か月前
株式会社不二越
ロボット
1か月前
トヨタ自動車株式会社
学習装置
1日前
川崎重工業株式会社
ハンド
1か月前
株式会社マキタ
ハンマドリル
25日前
株式会社マキタ
ハンマドリル
25日前
トヨタ自動車株式会社
ロボット
1か月前
工機ホールディングス株式会社
作業機
1か月前
株式会社不二越
移動ロボットシステム
1か月前
株式会社安川電機
ロボット
22日前
本田技研工業株式会社
装置
1か月前
川崎重工業株式会社
塗装システム
1か月前
株式会社不二越
垂直多関節ロボット
1日前
株式会社三共コーポレーション
工具保持具
16日前
トヨタ自動車株式会社
軌道生成装置
1か月前
シンフォニアテクノロジー株式会社
搬送装置
1か月前
トヨタ自動車株式会社
ロボットハンド
22日前
工機ホールディングス株式会社
作業機
1か月前
アネックスツール株式会社
ドライバービット
1か月前
ワールド技研株式会社
ロボットセル装置
1か月前
株式会社マキタ
回転打撃工具
1か月前
株式会社不二越
ロボットに用いる伝送路
1か月前
川崎重工業株式会社
ワーク搬送ロボット
1か月前
株式会社マキタ
現場用作業機
1か月前
NTN株式会社
ハンド
1か月前
山九株式会社
レンチ保持治具
1か月前
セイコーエプソン株式会社
ロボット
1か月前
トヨタ自動車株式会社
ロボットの制御装置
1か月前
NTN株式会社
把持装置
1か月前
NTN株式会社
把持装置
1か月前
ニデックインスツルメンツ株式会社
産業用ロボット
14日前
学校法人立命館
ロボットハンド制御システム
1か月前
NTN株式会社
作業装置
1か月前
続きを見る
他の特許を見る








 特許ウォッチ
特許ウォッチ