TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025165477
公報種別
公開特許公報(A)
公開日
2025-11-05
出願番号
2024069522
出願日
2024-04-23
発明の名称
関節位置誤認判定装置及び方法
出願人
アニマ株式会社
代理人
個人
,
個人
主分類
G06T
7/00 20170101AFI20251028BHJP(計算;計数)
要約
【課題】
左右反転による関節位置の誤認を検出する。
【解決手段】
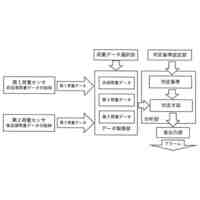
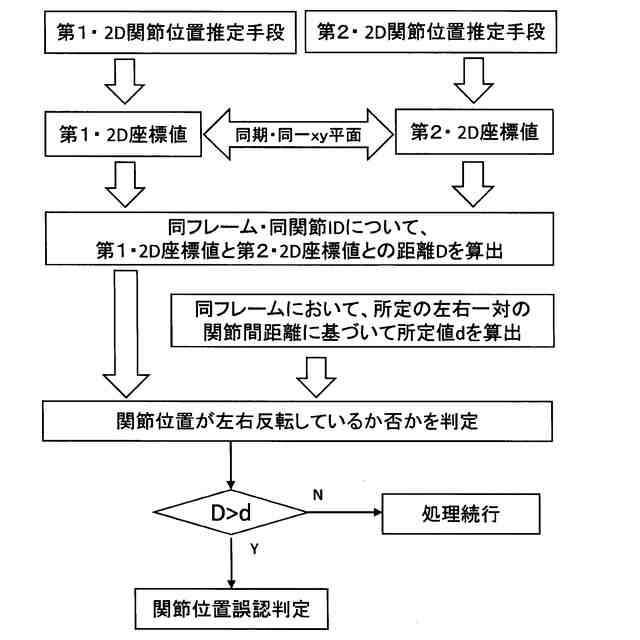
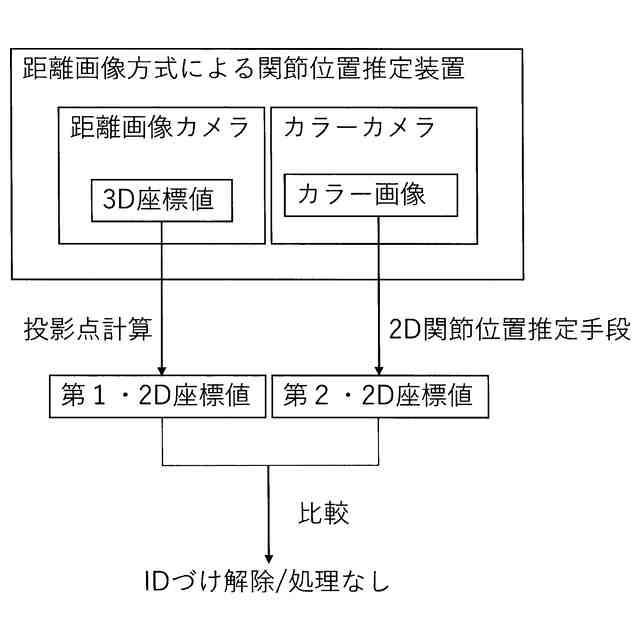
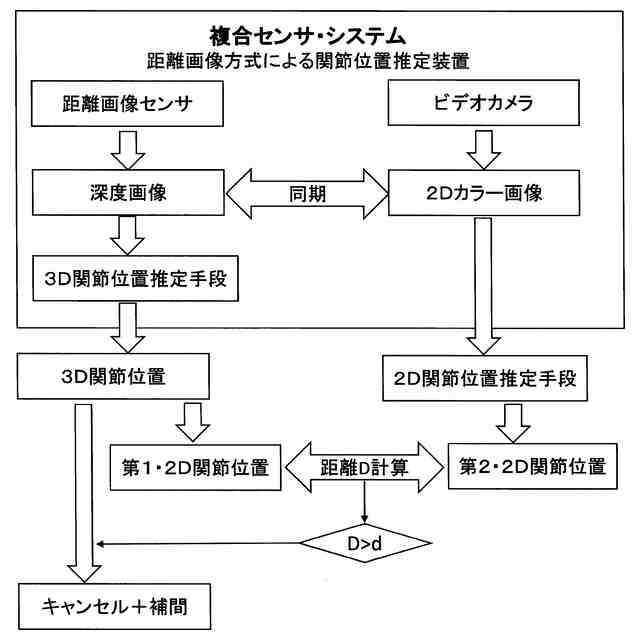
関節位置として第1・2D座標値を推定する第1・2D関節位置推定手段と、関節位置として第2・2D座標値を推定する第2・2D関節位置推定手段と、を備え、第1・2D座標値と第2・2D座標値は、共通のXY平面上の値として同期して得られており、同フレーム・同関節IDについて、第1・2D座標値と第2・2D座標値との距離Dを算出する手段と、距離Dが所定値dよりも大きい時に、当該関節位置が左右反転していると判定する判定手段と、を備え、所定値dは、同フレームにおける所定の左右一対の関節の2D座標間距離に基づいて決定される。
【選択図】図2
特許請求の範囲
【請求項1】
関節位置として第1・2D座標値を推定する第1・2D関節位置推定手段と、
関節位置として第2・2D座標値を推定する第2・2D関節位置推定手段と、
を備え、
第1・2D座標値と第2・2D座標値は、共通のXY平面上の値として同期して得られており、
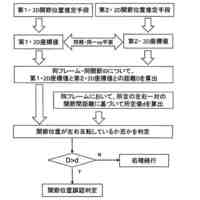
同フレーム・同関節IDについて、第1・2D座標値と第2・2D座標値との距離Dを算出する手段と、
距離Dが所定値dよりも大きい時に、当該関節位置が左右反転していると判定する判定手段と、
を備え、
所定値dは、同フレームにおける所定の左右一対の関節の2D座標間距離に基づいて決定される、
関節位置誤認判定装置。
続きを表示(約 1,300 文字)
【請求項2】
所定の左右一対の関節は、前記判定手段の判定対象となる関節に対応している、
請求項1に記載の関節位置誤認判定装置。
【請求項3】
所定の左右一対の関節は、複数の左右一対の関節から選択された1つあるいは複数の代表関節である、
請求項1に記載の関節位置誤認判定装置。
【請求項4】
所定値dは、前記左右一対の関節の2D座標間の距離の1/3から1/2の間の値から決定される、
請求項1~3いずれか1項に記載の関節位置誤認判定装置。
【請求項5】
関節の3D座標値を推定する3D関節位置推定手段を備え、
前記判定手段によって左右反転していると判定された関節IDに付与された3D座標値がキャンセルされ、当該フレームを除く複数フレームにおいて当該関節IDに付与された複数の3D座標値を用いて補間により取得した3D座標値に置き換えられる、
請求項1に記載の関節位置誤認判定装置。
【請求項6】
前記3D関節位置推定手段は、距離画像センサにより取得された距離画像を用いるもので あり、
前記第1・2D関節位置推定手段、前記第2・2D関節位置推定手段の一方が、前記3D関節位置推定手段により推定された3D関節位置に基づいて2D座標値を推定するものである、
請求項5に記載の関節位置誤認判定装置。
【請求項7】
関節の3D座標値を推定する3D関節位置推定手段を備え、
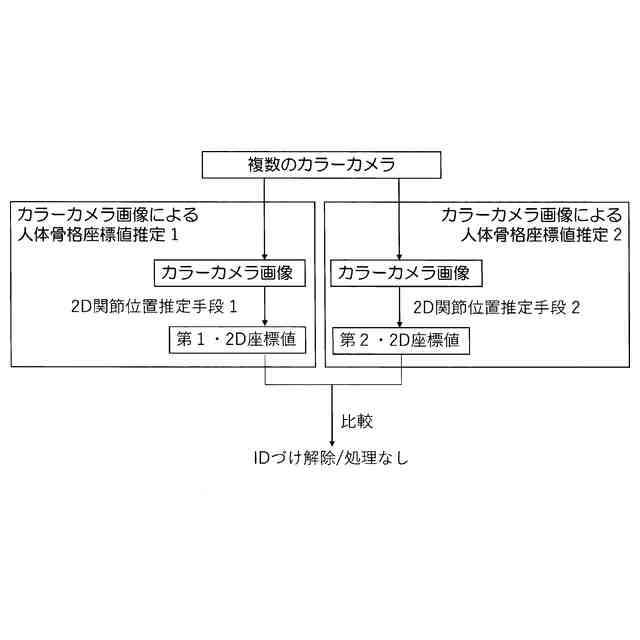
前記3D関節位置推定手段は、関節の複数の2D座標値を再構成して当該関節の3D座標値を取得するものであり、
前記判定手段によって左右反転していると判定された関節IDに対応する2D座標値を修正する手段を備え、
前記判定手段によって左右反転していると判定された関節IDに対応する3D座標値がキャンセルされ、修正された2D座標値を用いて再構成された3D座標値に置き換えられる、
請求項1に記載の関節位置誤認判定装置。
【請求項8】
第1・2D関節位置推定手段により、関節位置として第1・2D座標値を推定すること、
第2・2D関節位置推定手段により、関節位置として第2・2D座標値を推定すること、
同フレーム・同関節IDについて、第1・2D座標値と第2・2D座標値との距離Dを算出すること、
距離Dが所定値dよりも大きい時に、当該関節位置が左右反転していると判定すること、
を備え、
第1・2D座標値と第2・2D座標値は、共通のXY平面上の値として同期して得られており、
所定値dは、同フレームにおける所定の左右一対の関節の2D座標間距離に基づいて決定される、関節位置誤認判定方法。
【請求項9】
所定の左右一対の関節は、前記判定手段の判定対象となる関節に対応している、
請求項8に記載の関節位置誤認判定方法。
【請求項10】
所定の左右一対の関節は、複数の左右一対の関節から選択された1つあるいは複数の代表関節である、
請求項8に記載の関節位置誤認判定方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、モーションキャプチャに係り、詳しくは、関節位置誤認判定装置及び方法に関するものである。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
スポーツやリハビリテーションの分野では、被験者の運動を記録・分析するために、モーションキャプチャを用いた3次元動作解析が行われる。例えば、リハビリテーション医学では、これまで経験に基づいて治療方針や障害の程度を評価してきたが、近年、根拠に基づく医療(EBM)の重要性が述べられている。三次元関節位置の取得により人の動作を定量的に計測し、治療方針や障害の定量評価等を行い、根拠に基づく医療(EBM)の実現が可能となる。
【0003】
これまでは、赤外線反射方式の三次元動作分析装置を使用することで定量評価を行ってきていたが、マーカの貼り付けや計測後の処理に時間がかかり、臨床の場面で使用するためには計測時間の面から難しいという問題があった。
【0004】
近年、マーカや慣性センサを用いることがない、いわゆるマーカレス・モーションキャプチャが登場している。マーカレスの関節位置取得手法としては、距離画像(深度画像)を取得し、取得した1枚の深度画像から関節位置を推定する手法(非特許文献1)や単一のRGB画像から人間の姿を見つけ関節位置の確からしさを表すヒートマップを生成することで関節位置を推定する手法が知られている。前者については、Kinect(非特許文献2)に代表されるように、距離画像方式を採用した比較的安価なモーションキャプチャが市場に登場しており、後者については、OpenPose(https://github.com/CMU-Perceptual-Computing-Lab/open)やVisonPose(https://www.next-system.com/visionpose)が知られている。本出願人は、これらの手法を組み合わせて用いた関節位置取得装置及び方法を提案している(特許文献1)。
【0005】
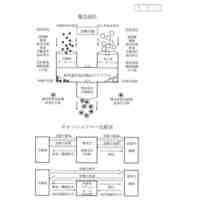
しかしながら、これらの技術においては関節位置の誤認がしばしば生じる。関節位置の誤認の特徴としては、人体が左右対称であることにより、左右の関節点が反転して出力されることが挙げられる(図1参照)。「人体が左右対称であること」は、人体は矢状面(上下軸と前後軸の作る面)に対して対象であることを指す。静的な画像において、前額面(上下軸と左右軸の作る面)がカメラの素子の面と同じ方向を向いている場合で顔が映っていない場合には、カメラ方向を向いているか、カメラと反対方向を向いているかは、機械において判別が難しい場合がある。
【0006】
従来は、そのまま計測を行ったり、もしくは、出力された対象の3D関節位置において、人間の目によって左右反転の関節位置を検出し、その部分の関節のID付けを解除し、当該関節位置の補間を行ったりしていた。
【0007】
このような左右反転を解決するために最も簡便な方法はディープラーニングをはじめとするAI技術によって、追加の学習を行うことである。しかし、開発メーカーでない場合、学習データを得ることが難しい。加えて、独自に学習データを取得し、データの前処理や学習を実行するためには非常に多くのコストがかかるため、ユーザサイドにおいて、現実的には実行することが容易ではないという問題がある。
【先行技術文献】
【特許文献】
【0008】
特許第7287686号
【非特許文献】
【0009】
J. Shotton et al.,“Real-Time Human Pose Recognition in Parts from a Single depth Image,”Proc. IEEE Conf. Computer Vision and Pattern Recognition (CVPR), IEEE CS Press, 2011, pp. 1297-1304.
Z. Zhang. Microsoft kinect sensor and its effect. IEEE Multimedia, 19(2):4-10, Feb 2012.
【発明の開示】
【発明が解決しようとする課題】
【0010】
上記のような左右反転による関節位置の誤認を検出して、当該関節位置を適切に補正することは、関節位置の正確性を担保するうえで重要であり、また、これらのことをより低コストで実現することが望まれる。
【課題を解決するための手段】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
アニマ株式会社
足装着型荷重計測デバイス
3か月前
アニマ株式会社
関節位置誤認判定装置及び方法
9日前
個人
詐欺保険
1か月前
個人
縁伊達ポイン
1か月前
個人
職業自動販売機
今日
個人
RFタグシート
18日前
個人
5掛けポイント
7日前
個人
ペルソナ認証方式
15日前
個人
情報処理装置
10日前
個人
自動調理装置
17日前
個人
農作物用途分配システム
1か月前
個人
タッチパネル操作指代替具
24日前
個人
インターネットの利用構造
14日前
個人
サービス情報提供システム
2日前
個人
スケジュール調整プログラム
23日前
個人
携帯端末障害問合せシステム
23日前
個人
エリアガイドナビAIシステム
15日前
エッグス株式会社
情報処理装置
24日前
キヤノン株式会社
情報処理装置
8日前
株式会社ケアコム
項目選択装置
10日前
株式会社ワコム
電子ペン
9日前
株式会社ケアコム
項目選択装置
10日前
株式会社ワコム
電子ペン
9日前
トヨタ自動車株式会社
通知装置
21日前
キヤノン株式会社
印刷システム
23日前
太陽誘電株式会社
表示装置
21日前
トヨタ自動車株式会社
車両
22日前
株式会社ゼロワン
ケア支援システム
7日前
PRONI株式会社
受発注支援装置
今日
株式会社フジシール
識別情報利用システム
今日
株式会社PIPS
2次元可視コード
28日前
PRONI株式会社
受発注支援装置
今日
日本電気株式会社
異常検知装置
22日前
株式会社三富
取引管理システム
17日前
個人
キャリアウーマン家庭科実習プログラム
今日
三菱電機株式会社
点検管理装置
15日前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ