TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025161547
公報種別
公開特許公報(A)
公開日
2025-10-24
出願番号
2024064836
出願日
2024-04-12
発明の名称
情報処理装置、情報処理方法、プログラム、及び記録媒体
出願人
国立研究開発法人産業技術総合研究所
代理人
弁理士法人 HARAKENZO WORLD PATENT & TRADEMARK
主分類
G01C
21/28 20060101AFI20251017BHJP(測定;試験)
要約
【課題】推定対象の速度と位置との間の不整合を抑制し、算出した移動距離等の精度を向上させる。
【解決手段】情報処理装置(1)は、対象の速度及び角速度の少なくとも何れかに関する情報である第1種の情報を取得する第1の取得部(11)と、前記対象の位置及び向きの少なくとも何れかに関する情報である第2種の情報を取得する第2の取得部(12)と、前記第1種の情報と、前記第2種の情報とに基づき、前記位置及び向きの少なくとも何れかに関する補正値を、前記第1種の情報と当該補正値の差分との誤差である第1の誤差を参照して導出する第1の導出部(13とを備えている。
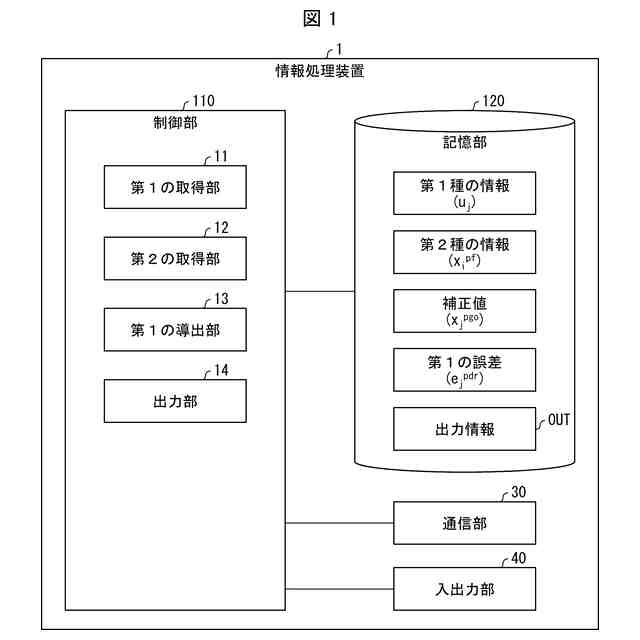
【選択図】図1
特許請求の範囲
【請求項1】
対象の速度及び角速度の少なくとも何れかに関する情報である第1種の情報を取得する第1の取得部と、
前記対象の位置及び向きの少なくとも何れかに関する情報である第2種の情報を取得する第2の取得部と、
前記第1種の情報と、前記第2種の情報とに基づき、
前記位置及び向きの少なくとも何れかに関する補正値を、前記第1種の情報と当該補正値の差分との誤差である第1の誤差を参照して導出する第1の導出部と
を備えている情報処理装置。
続きを表示(約 1,000 文字)
【請求項2】
前記第2の取得部は、
前記第1種の情報及び前記第1種の情報とは異なる情報を参照して、前記第2種の情報を導出する第2の導出部
を備えている請求項1に記載の情報処理装置。
【請求項3】
前記第1の導出部は、
前記補正値を、前記第2種の情報と前記補正値との誤差である第2の誤差を更に参照して導出する
請求項2に記載の情報処理装置。
【請求項4】
前記第1の導出部は、
前記第2の誤差を、前記第1種の情報及び前記第1種の情報とは異なる情報の少なくとも何れかの計測精度に応じた共分散行列を参照して、前記第2の誤差を算出する
請求項3に記載の情報処理装置。
【請求項5】
前記第2の誤差を規定する関数は、
前記第2種の情報と前記補正値との差分としての引数が所定の値よりも大きい場合の当該関数の傾きが、当該差分が所定の値以下である場合の当該関数の傾きよりも小さくなるよう構成された関数である
請求項3に記載の情報処理装置。
【請求項6】
前記第1の導出部は、
前記補正値を、前記第1種の情報のスケール誤差を更に参照して導出する
請求項3に記載の情報処理装置。
【請求項7】
前記第1の導出部は、
前記補正値を、第1の誤差とは異なる複数種類の誤差のうち、他の誤差と整合しない誤差を除外して得られる1又は複数の誤差を更に参照して導出する
請求項3に記載の情報処理装置。
【請求項8】
前記第2の導出部は、
前記第1の導出部によって導出された前記補正値を更に参照して、前記第2種の情報を導出する
請求項3に記載の情報処理装置。
【請求項9】
前記第1の導出部によって導出された前記補正値に基づく、前記対象の前記位置及び向きの少なくとも何れかを表示する表示部
を更に備える請求項1から8の何れか1項に記載の情報処理装置。
【請求項10】
前記第1種の情報は、慣性計測装置による計測結果を参照して導出されたものであり、
前記第2の導出部は、
前記第1種の情報に対して、BLE距離検知、BLE方向検知、及びBLE位置検知の少なくとも何れかの結果を参照した補正処理を適用することによって、前記第2種の情報を導出する
請求項2から8の何れか1項に記載の情報処理装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、情報処理装置、情報処理方法、プログラム、及び記録媒体に関する。
続きを表示(約 2,300 文字)
【背景技術】
【0002】
各種のセンサの出力を参照して対象(対象物、対象者)の位置を逐次的に推定する技術(一例として慣性航法技術(PDR: Pedestrian Dead Reckoning)とも呼ばれる)が知られている。例えば、特許文献1には、センサ出力を用いて推定した進行方向と移動速度とから自装置の推定位置を導出し、絶対位置情報によって推定位置を補正する技術が開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2017-106891号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
一般に、センサの出力を参照した推定技術では、測定誤差及び推定誤差が生じ得る。このため、従来の位置推定技術では、推定対象の速度と位置との間に不整合が生じ、その結果として推定対象の位置の差分が必ずしも実際の速度にはならず、この積算値である移動距離が実際の移動距離と乖離する。たとえば、カルマンフィルタなどを使用する従来の測位法は各時刻の位置推定誤差を最小化するよう逐次的に求めるため、過去の位置に対して必ずしも連続的な位置が推定されるわけではない。そして、このような時間的に不連続な位置推定結果を用いると、速度や移動距離等が実際と大きく乖離するという問題が生じていた。
【0005】
本発明の一態様は、推定対象の速度と位置との間の不整合を抑制し、算出した移動距離等の精度を向上させることのできる技術を提供することを目的とする。
【課題を解決するための手段】
【0006】
上記の課題を解決するために、本発明の一態様に係る情報処理装置は、対象の速度及び角速度の少なくとも何れかに関する情報である第1種の情報を取得する第1の取得部と、前記対象の位置及び向きの少なくとも何れかに関する情報である第2種の情報を取得する第2の取得部と、前記第1種の情報と、前記第2種の情報とに基づき、前記位置及び向きの少なくとも何れかに関する補正値を、前記第1種の情報と当該補正値の差分との誤差である第1の誤差を参照して導出する第1の導出部とを備えている。
【0007】
上記の課題を解決するために、本発明の一態様に係る情報処理方法は、対象の速度及び角速度の少なくとも何れかに関する情報である第1種の情報を取得する第1の取得ステップと、前記対象の位置及び向きの少なくとも何れかに関する情報である第2種の情報を取得する第2の取得ステップと、前記第1種の情報と、前記第2種の情報とに基づき、前記位置及び向きの少なくとも何れかに関する補正値を、前記第1種の情報と当該補正値の差分との誤差である第1の誤差を参照して導出する第1の導出ステップとを含んでいる。
【0008】
本発明の各態様に係る情報処理装置は、コンピュータによって実現してもよく、この場合には、コンピュータを前記情報処理装置が備える各部(ソフトウェア要素)として動作させることにより前記情報処理装置をコンピュータにて実現させる情報処理装置のプログラム、およびそれを記録したコンピュータ読み取り可能な記録媒体も、本発明の範疇に入る。
【発明の効果】
【0009】
本発明の一態様によれば、推定対象の速度と位置との間の不整合を抑制し、算出した移動距離等の精度を向上させることができる。
【図面の簡単な説明】
【0010】
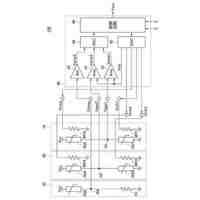
本発明の実施形態1に係る情報処理装置の構成を示すブロック図である。
本発明の実施形態1に係る情報処理装置による出力例を示す図である。
本発明の実施形態2に係る情報処理装置の構成を示すブロック図である。
本発明の実施形態2に係る情報処理装置による処理の流れを示すフロー図である。
本発明の実施形態2に係る情報処理装置の処理を説明するための図である。
本発明の実施形態2に係る情報処理装置の構成例を示すブロック図である。
本発明の実施形態2に係る情報処理装置の処理を説明するための図である。
本発明の実施形態2に係る情報処理装置の処理を説明するための図である。
本発明の実施形態2に係る情報処理装置の処理を説明するための図である。
本発明の実施形態2に係る情報処理装置の処理を説明するための図である。
本発明の実施形態2に係る情報処理装置の処理を説明するための図である。
本発明の実施形態2に係る情報処理装置の構成例を示すブロック図である。
本発明の実施形態2に係る情報処理装置の構成例を示すブロック図である。
本発明の実施形態2に係る情報処理装置の構成例を示すブロック図である。
本発明の実施形態2に係る情報処理装置の構成例を示すブロック図である。
本発明の実施形態2に係る情報処理装置の構成例を示すブロック図である。
本発明の実施形態2に係る情報処理装置の構成例を示すブロック図である。
本発明の実施形態2に係る情報処理装置の構成例を示すブロック図である。
本発明の実施形態2に係る情報処理装置の構成例を示すブロック図である。
本発明の実施形態2に係る情報処理システムの構成例を示すブロック図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
メジャー文具
25日前
個人
採尿及び採便具
2日前
個人
アクセサリー型テスター
18日前
個人
高精度同時多点測定装置
17日前
ユニパルス株式会社
ロードセル
24日前
株式会社ミツトヨ
測定器
8日前
アズビル株式会社
電磁流量計
11日前
株式会社ヨコオ
ソケット
23日前
ダイキン工業株式会社
監視装置
22日前
株式会社ヨコオ
ソケット
24日前
株式会社チノー
放射光測温装置
24日前
トヨタ自動車株式会社
監視装置
23日前
大和製衡株式会社
組合せ計量装置
5日前
TDK株式会社
ガスセンサ
24日前
個人
システム、装置及び実験方法
11日前
大和製衡株式会社
組合せ計量装置
5日前
ローム株式会社
半導体装置
16日前
TDK株式会社
ガスセンサ
29日前
TDK株式会社
磁気センサ
23日前
愛知電機株式会社
軸部材の外観検査装置
5日前
愛知時計電機株式会社
ガスメータ
8日前
ローム株式会社
半導体装置
16日前
長崎県
形状計測方法
18日前
TDK株式会社
電磁波センサ
24日前
中国電力株式会社
電柱管理システム
22日前
日本特殊陶業株式会社
センサ
22日前
日本特殊陶業株式会社
センサ
22日前
日本特殊陶業株式会社
センサ
22日前
日本特殊陶業株式会社
センサ
22日前
多摩川精機株式会社
冗長エンコーダ
23日前
日本特殊陶業株式会社
センサ
8日前
三恵技研工業株式会社
融雪レドーム
23日前
日本特殊陶業株式会社
センサ
22日前
三菱マテリアル株式会社
温度センサ
25日前
株式会社デンソー
電流センサ
16日前
トヨタ自動車株式会社
測定システム
15日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ