TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025161072
公報種別
公開特許公報(A)
公開日
2025-10-24
出願番号
2024063968
出願日
2024-04-11
発明の名称
車両の制御システム
出願人
スズキ株式会社
代理人
個人
,
個人
,
個人
,
個人
,
個人
,
個人
主分類
G08G
1/16 20060101AFI20251017BHJP(信号)
要約
【課題】車両の周囲環境に応じて適切な自動ブレーキ制御を実行することができる車両の制御システムを提供する。
【解決手段】車両の制御システム1は、車両の前方に存在する対象障害物との衝突可能性を判定する衝突判定部21aと、前記衝突判定部21aで判定された衝突可能性に応じて自動ブレーキ制御を行うようにブレーキ力を制御するブレーキ制御部21cと、前記車両の周囲環境を判定する環境判定部22と、前記環境判定部22によって判定された前記車両の周囲環境に応じて、前記自動ブレーキ制御における前記対象障害物の種類を変更する調整部23とを備える。
【選択図】図2
特許請求の範囲
【請求項1】
車両の前方に存在する対象障害物との衝突可能性を判定する衝突判定部と、
前記衝突判定部で判定された衝突可能性に応じて自動ブレーキ制御を行うようにブレーキ力を制御するブレーキ制御部と、
前記車両の周囲環境を判定する環境判定部と、
前記環境判定部によって判定された前記車両の周囲環境に応じて、前記自動ブレーキ制御における前記対象障害物の種類を変更する調整部と
を備える、車両の制御システム。
続きを表示(約 880 文字)
【請求項2】
前記環境判定部によって前記車両の周囲環境が特定環境でないと判定されると、前記調整部は前記対象障害物の種類を増やすように構成されている、請求項1に記載の車両の制御システム。
【請求項3】
前記環境判定部は、前記特定環境として所定の地理的領域を設定する、請求項2に記載の車両の制御システム。
【請求項4】
前記環境判定部は、前記車両の周囲の所定範囲内における障害物の密度に基づいて、前記車両の周囲環境が前記特定環境であるか否かを判定する、請求項2に記載の車両の制御システム。
【請求項5】
前記環境判定部は、前記車両の周囲環境として、前記車両が市街地にいるか否かを判定し、
前記調整部は、前記車両が市街地にいる場合に四輪車を前記対象障害物として設定し、前記車両が市街地外にいる場合に四輪車および歩行者を前記対象障害物として設定する、請求項1に記載の車両の制御システム。
【請求項6】
前記環境判定部は、前記自動ブレーキ制御の実行によって前記車両と前記車両の後続車とが接触する可能性がある場合に、前記車両の周囲環境が前記特定の環境であると判定する、請求項2に記載の車両の制御システム。
【請求項7】
前記調整部は、前記車両の周囲環境によらず、少なくとも1種類の障害物を前記対象障害物として設定する、請求項1に記載の車両の制御システム。
【請求項8】
前記環境判定部は、前記車両の周囲環境として、時間帯、季節、および天候の少なくともいずれかを判定する、請求項1に記載の車両の制御システム。
【請求項9】
前記衝突判定部で判定された前記衝突可能性に応じて警報制御を行う警報制御部をさらに備え、
前記調整部は、前記車両の周囲環境に応じて、前記警報制御のみを行う第1制御と、前記警報制御および前記自動ブレーキ制御を行う第2制御とを切り替えるように構成されている、請求項1から8のいずれか一項に記載の車両の制御システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、車両の制御システムに関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
車両前方の障害物と車両との衝突が予測される場合に、安全を支援するためのシステムの実用化が進められている。安全を支援するためのシステムとしては、自動的にブレーキおよび/または警報を作動させる衝突被害軽減ブレーキシステム、車両と衝突した人間を保護するための、いわゆる歩行者エアバッグシステム等が知られている。特許文献1には、物体と車両との衝突の際に印加された衝撃に応じた衝突センサの出力が衝突判定閾値を超えた場合に、衝突した物体を保護する保護デバイスを動作させる保護制御装置が開示されている。特許文献1の装置においては、物体が、自転車および自転車の乗員を含む特定物体であって、衝突以前における物体の認識を阻害する、降雨または霧を含む阻害環境が発生している場合に、衝突判定閾値を低閾値に設定する。
【先行技術文献】
【特許文献】
【0003】
特開2019-081428号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上述した特許文献1に記載された保護制御装置においては、物体が特定物体であるか否か、および降雨または霧を含む阻害環境が発生しているか否かに基づいて、衝突判定閾値を変更している。車両と障害物との衝突が予測される場合に衝突被害軽減ブレーキ制御を実行するシステムにおいても、車両周囲の環境を考慮して制御を行うことが望ましい。例えば、車両の周囲に四輪車、二輪車、および歩行者を含む複数種類の障害物が入り乱れて存在している環境では、前方障害物を対象とした自動ブレーキ制御を実行することによって車両が減速し、後続車から追突されてしまう可能性がある。この場合、システムに対する信頼性や安全性が低下してしまう。一方、車両の周囲に存在する障害物が少ない環境では、障害物との衝突可能性がある場合に確実に自動ブレーキ制御を実行することが望まれる。すなわち、車両周囲の環境に応じて、システムによる安全性および信頼性を高めて適切に自動ブレーキ制御を実行することが望まれている。
【0005】
本発明は、上記のような実状に鑑みてなされたものであり、その目的は、車両の周囲環境に応じて適切な自動ブレーキ制御を実行することができる車両の制御システムを提供することにある。
【課題を解決するための手段】
【0006】
本発明の一態様によれば、車両の制御システムは、車両の前方に存在する対象障害物との衝突可能性を判定する衝突判定部と、前記衝突判定部で判定された衝突可能性に応じて自動ブレーキ制御を行うようにブレーキ力を制御するブレーキ制御部と、前記車両の周囲環境を判定する環境判定部と、前記環境判定部によって判定された前記車両の周囲環境に応じて、前記自動ブレーキ制御における前記対象障害物の種類を変更する調整部とを備える。
【発明の効果】
【0007】
本発明に係る車両の制御システムは、車両の周囲環境に応じて適切な自動ブレーキ制御を実行することができる。
【図面の簡単な説明】
【0008】
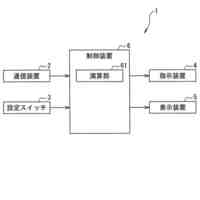
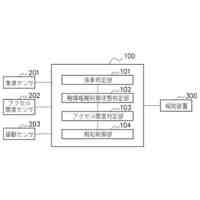
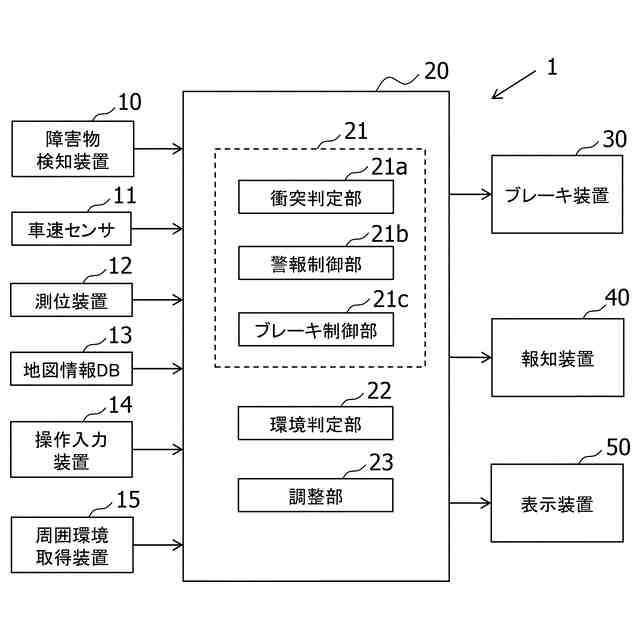
図1は、本発明の第1の実施の形態における車両の制御システムの概略構成を示すブロック図である。
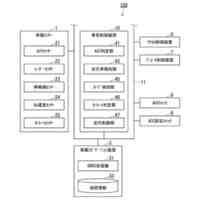
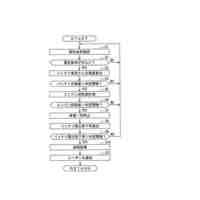
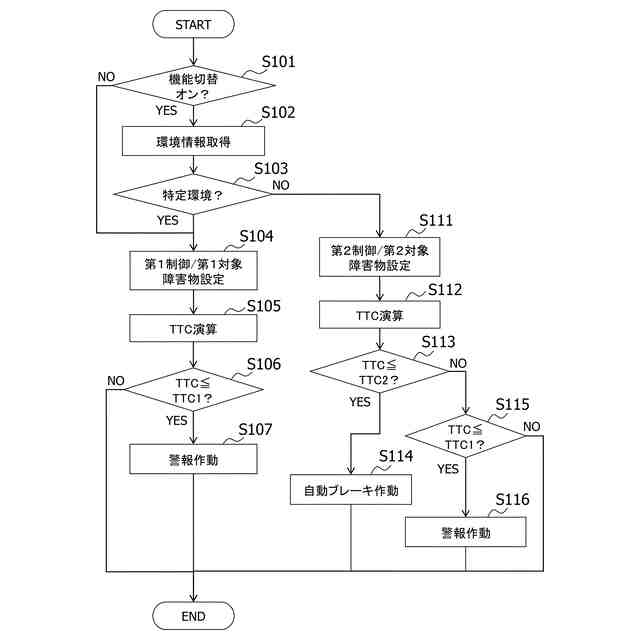
図2は、第1実施の形態における衝突被害軽減ブレーキ制御の流れを示すフローチャートである。
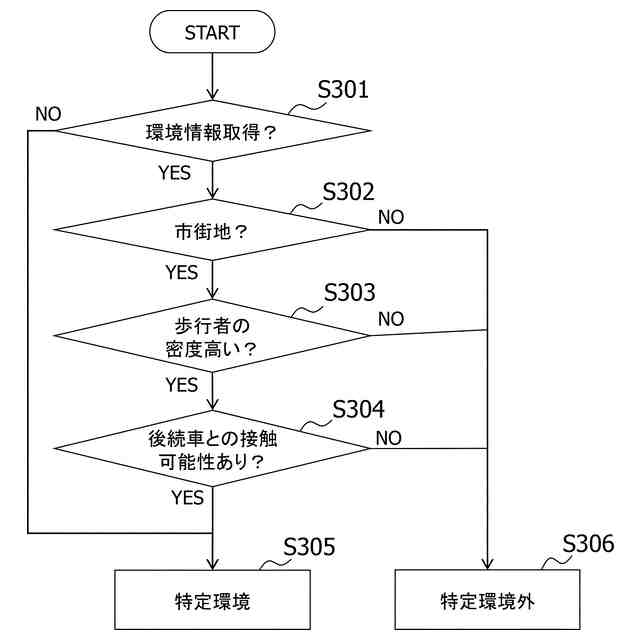
図3は、本発明の第2の実施の形態における特定環境判定処理の流れを示すフローチャートである。
【発明を実施するための形態】
【0009】
-第1の実施の形態-
以下、本発明の第1の実施の形態に係る車両の制御システムについて、図面を参照しながら詳細に説明する。図1は、本実施の形態における車両の制御システムの概略構成を示すブロック図である。
【0010】
図1に示すように、車両の制御システム1は、例えば、車両周囲の障害物を検知する障害物検知装置10、車両の車速を検知する車速センサ11、車両の位置情報を取得する測位装置12、地図情報データベース13、操作入力装置14、車両の衝突被害軽減ブレーキ制御に関連する制御を行う制御装置20、ブレーキ装置30、および報知装置40を備えている。本実施の形態による車両の制御システム1は、車両に搭載されて車両の衝突被害軽減ブレーキ制御に関連する制御を実行するように構成されている。車両の制御システム1は、任意選択的に、車両周囲の環境情報を取得する周囲環境取得装置15、および表示装置50をさらに備えることもできる。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
スズキ株式会社
車両構造
2か月前
スズキ株式会社
車室構造
2か月前
スズキ株式会社
車両構造
2か月前
スズキ株式会社
車両構造
2か月前
スズキ株式会社
車両構造
2か月前
スズキ株式会社
開閉機構
1か月前
スズキ株式会社
車室構造
2か月前
スズキ株式会社
車室構造
2か月前
スズキ株式会社
車両構造
2か月前
スズキ株式会社
車両構造
2か月前
スズキ株式会社
車両構造
2か月前
スズキ株式会社
車両構造
2か月前
スズキ株式会社
シート構造
1か月前
スズキ株式会社
リッド構造
4日前
スズキ株式会社
車体カバー
11日前
スズキ株式会社
リッド構造
4日前
スズキ株式会社
シート構造
1か月前
スズキ株式会社
電源システム
4日前
スズキ株式会社
車両後部構造
1か月前
スズキ株式会社
車両検査装置
1か月前
スズキ株式会社
動力伝達装置
1か月前
スズキ株式会社
車両制御装置
1か月前
スズキ株式会社
車両側部構造
1か月前
スズキ株式会社
車体下部構造
4日前
スズキ株式会社
運転支援装置
19日前
スズキ株式会社
車両用変速機
4日前
スズキ株式会社
車体下部構造
4日前
スズキ株式会社
車両制御装置
4日前
スズキ株式会社
車両の制御装置
13日前
スズキ株式会社
車両用制御装置
1か月前
スズキ株式会社
車両の制御装置
1か月前
スズキ株式会社
車両用制御装置
4日前
スズキ株式会社
車両用制御装置
1か月前
スズキ株式会社
車両の制御装置
1か月前
スズキ株式会社
パーツボックス
19日前
スズキ株式会社
車両用荷室構造
2か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ