TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025159651
公報種別
公開特許公報(A)
公開日
2025-10-21
出願番号
2024062384
出願日
2024-04-08
発明の名称
推定装置及び表示装置
出願人
株式会社SOKEN
,
株式会社デンソー
代理人
個人
,
個人
主分類
G01S
13/931 20200101AFI20251014BHJP(測定;試験)
要約
【課題】存在確率の推定精度を向上させた推定装置を提供する。
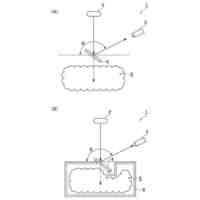
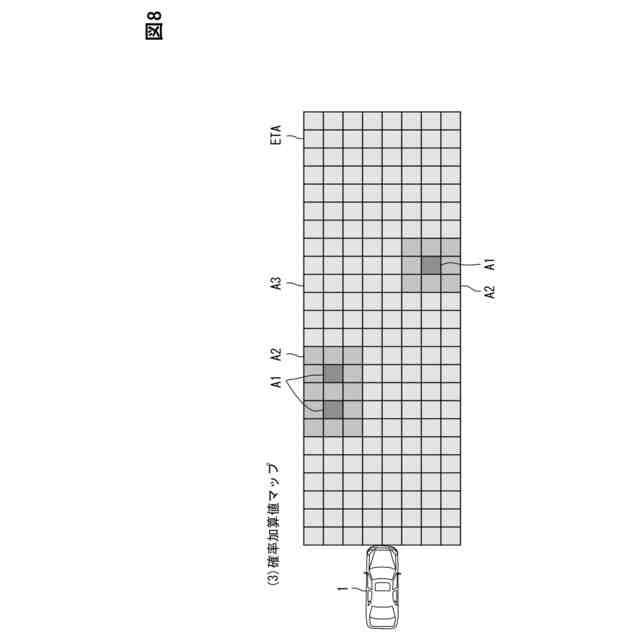
【解決手段】推定装置100は、車両1の周辺を検知した検知点DPを含むセンサデータに基づいて、車両1の周辺の推定対象領域ETAにおける物体の存在確率を推定する存在確率推定部P2を備える。存在確率推定部P2は、推定対象領域ETAのうち、今回のセンサデータの検知点DPに対応する検知領域A1と、検知領域A1に近接する近接領域A2と、検知領域A1及び近接領域A2を除く残領域A3との間で、相互に異なる存在確率を設定する。
【選択図】図8
特許請求の範囲
【請求項1】
移動体(1)の周辺を検知した検知点(DP)を含むセンサデータに基づいて、前記移動体の周辺の推定対象領域(ETA)における物体の存在確率を推定する存在確率推定部(P2)を備える推定装置であって、
前記存在確率推定部は、前記推定対象領域のうち、今回の前記センサデータの前記検知点に対応する検知領域(A1)と、前記検知領域に近接する近接領域(A2)と、前記検知領域及び前記近接領域を除く残領域(A3)との間で、相互に異なる存在確率を設定する、推定装置。
続きを表示(約 1,200 文字)
【請求項2】
前記存在確率推定部は、
前記近接領域に対する今回の存在確率の前記近接領域に対する前回の存在確率の変化量を、前記検知領域に対して与える変化量と前記残領域に対して与える変化量との間で制御する、請求項1に記載の推定装置。
【請求項3】
前記存在確率推定部は、
前記検知領域に対して、今回の存在確率を前回の存在確率から増加方向に変化させ、
前記残領域に対して、今回の存在確率を前回の存在確率から減少方向に変化させ、
前記近接領域に対して、今回の存在確率を、前記検知領域よりも小さな増加方向の変化量と、前記残領域よりも小さな減少方向の変化量との間で制御する、請求項2に記載の推定装置。
【請求項4】
前記存在確率推定部は、前記近接領域に対して、前回の存在確率が予め設定された存在判定閾値未満の場合に、今回の存在確率が前記存在判定閾値未満かつ前回の存在確率から増加方向に変化した確率となるように操作を実行する、請求項2に記載の推定装置。
【請求項5】
前記存在確率推定部は、前記近接領域に対して、前回の存在確率が予め設定された存在判定閾値以上の場合に、今回の存在確率が前記存在判定閾値以上かつ前回の存在確率から減少方向に変化した確率となるように操作を実行する、請求項2に記載の推定装置。
【請求項6】
前記存在確率推定部は、前記近接領域に対して、今回の存在確率を前回の存在確率をそのまま維持したものとする、請求項2に記載の推定装置。
【請求項7】
前記存在確率推定部は、
前記近接領域のうち、確率変更操作が予め設定された期間に実行された領域については、今回の存在確率を前回の存在確率をそのまま維持し、
前記確率変更操作が予め設定された期間に実行されなかった領域については、今回の存在確率を前回の存在確率から減少方向に変化させる、請求項2に記載の推定装置。
【請求項8】
前記存在確率推定部は、1回の増加方向への確率変化操作により、今回の存在確率が予め設定された存在判定閾値を超えることを可能とするように、前記推定対象領域の存在確率の下限値を設定する、請求項1に記載の推定装置。
【請求項9】
前記センサデータは、ミリ波レーダ(11)により検知された前記検知点における反射波の強度を含み、
前記存在確率推定部は、前記近接領域の範囲を、前記反射波の強度に応じて決定する、請求項1に記載の推定装置。
【請求項10】
前記センサデータは、ミリ波レーダ(11)により検知された前記検知点における反射波のスペクトラムを含み、
前記存在確率推定部は、前記近接領域の範囲を、前記反射波のスペクトラムの広がりに応じて決定する、請求項1に記載の推定装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
この明細書による開示は、移動体の周辺の推定対象領域における物体の存在確率を推定する技術に関する。
続きを表示(約 1,200 文字)
【背景技術】
【0002】
特許文献1には、移動体の周辺の推定対象領域における物体の存在確率をマップ化したOGM(Occupancy Grid Map)を圧縮することが開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2020-42726号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1のように推定結果を圧縮することで、移動体において利用し易くなる。しかしながら、そもそもの存在確率の推定精度が悪い場合、物体の存在を誤検知してしまう可能性がある。
【0005】
この明細書の開示による目的のひとつは、存在確率の推定精度を向上させた推定装置、及び、この推定装置による推定結果を表示可能な表示装置を提供することにある。
【課題を解決するための手段】
【0006】
ここに開示された態様のひとつは、移動体(1)の周辺を検知した検知点(DP)を含むセンサデータに基づいて、移動体の周辺の推定対象領域(ETA)における物体の存在確率を推定する存在確率推定部(P2)を備える推定装置であって、
存在確率推定部は、推定対象領域のうち、今回のセンサデータの検知点に対応する検知領域(A1)と、検知領域に近接する近接領域(A2)と、検知領域及び近接領域を除く残領域(A3)との間で、相互に異なる存在確率を設定する。
【0007】
このような態様によると、単純に検知点と非検知点とで異なる存在確率を設定するのではなく、空間的な連続性を考慮し、物体の存在可能性が検知点から遠い領域よりも高いと考えられる検知点近傍の近接領域に、個別の存在確率が設定される。空間的な連続性に着目した存在確率の設定により、存在確率の推定精度を向上させることが可能となる。
【0008】
また、開示された態様の他のひとつは、上記の推定装置と通信可能に接続された表示装置であって、
存在確率のマップを画像化した表示コンテンツを生成する表示コンテンツ生成部(32a)と、
表示コンテンツを表示する画面を有するディスプレイ(32b)と、を備える。
【0009】
このような態様によると、表示される存在確率マップが空間的な連続性に着目して存在確率を設定したものであるため、これを視認する視認者へ精度の推定結果を提供すると共に、マップの違和感を低減することができる。
【0010】
なお、特許請求の範囲等に含まれる括弧内の符号は、後述する実施形態の部分との対応関係を例示的に示すものであって、技術的範囲を限定することを意図するものではない。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
視触覚センサ
1日前
日本精機株式会社
検出装置
1か月前
個人
採尿及び採便具
1か月前
個人
計量機能付き容器
26日前
日本精機株式会社
発光表示装置
9日前
甲神電機株式会社
電流検出装置
1か月前
株式会社カクマル
境界杭
16日前
株式会社ミツトヨ
測定器
1か月前
ユニパルス株式会社
トルク変換器
1日前
ユニパルス株式会社
トルク変換器
1日前
ユニパルス株式会社
トルク変換器
1日前
株式会社トプコン
測量装置
8日前
アズビル株式会社
電磁流量計
1か月前
大成建設株式会社
風洞実験装置
26日前
日本信号株式会社
距離画像センサ
29日前
日本特殊陶業株式会社
ガスセンサ
24日前
個人
計量具及び計量機能付き容器
26日前
日本特殊陶業株式会社
ガスセンサ
1日前
愛知電機株式会社
軸部材の外観検査装置
1か月前
大和製衡株式会社
組合せ計量装置
1か月前
個人
システム、装置及び実験方法
1か月前
大和製衡株式会社
組合せ計量装置
1か月前
日本特殊陶業株式会社
ガスセンサ
2日前
個人
非接触による電磁パルスの測定方法
29日前
双庸電子株式会社
誤配線検査装置
1か月前
愛知時計電機株式会社
ガスメータ
1か月前
日本特殊陶業株式会社
ガスセンサ
8日前
日置電機株式会社
絶縁抵抗測定装置
1日前
個人
液位検視及び品質監視システム
24日前
日本特殊陶業株式会社
センサ
1か月前
本陣水越株式会社
車載式計測標的物
3日前
日東精工株式会社
振動波形検査装置
1か月前
株式会社タイガーカワシマ
揚穀装置
8日前
日本特殊陶業株式会社
センサ
10日前
キーコム株式会社
画像作成システム
16日前
株式会社不二越
X線測定装置
29日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ