TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025159203
公報種別
公開特許公報(A)
公開日
2025-10-17
出願番号
2025137572,2023098344
出願日
2025-08-21,2013-12-12
発明の名称
圃場作業機
出願人
株式会社クボタ
代理人
弁理士法人R&C
主分類
A01B
69/00 20060101AFI20251009BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】自動走行を用いた圃場作業を、より簡単にかつ熟練を要することなく実施することができる圃場作業機の提供。
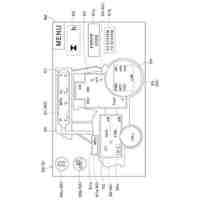
【解決手段】作業走行は自動走行制御部61によって自動走行され、非作業走行は運転者によって操縦され、前記運転支援ユニット8には、動作タイミング情報に基づいて運転者に動作タイミングを報知するための報知情報として、運転者による操作時間を考慮して、少し早いタイミングで、非作業走行の終了または作業走行の開始を報知する報知情報生成部82が含まれている。
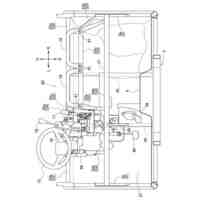
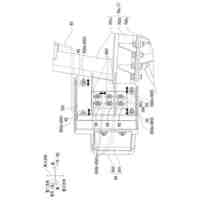
【選択図】図1
特許請求の範囲
【請求項1】
走行機体と、圃場に対する農作業を行う圃場作業装置と、測位データを出力するGPSモジュールと、前記測位データと前記圃場作業装置を用いた作業走行を行う走行経路とに基づいて運転支援を行う運転支援ユニットと、を備え、
前記運転支援ユニットには、圃場の枕地において前記走行機体が作業走行経路から次の作業走行経路に向かって旋回する際に、走行機体の方向転換を伴う非作業走行経路から作業走行経路へ移行するタイミングを含む動作タイミング情報を生成する動作情報生成部が備えられ、
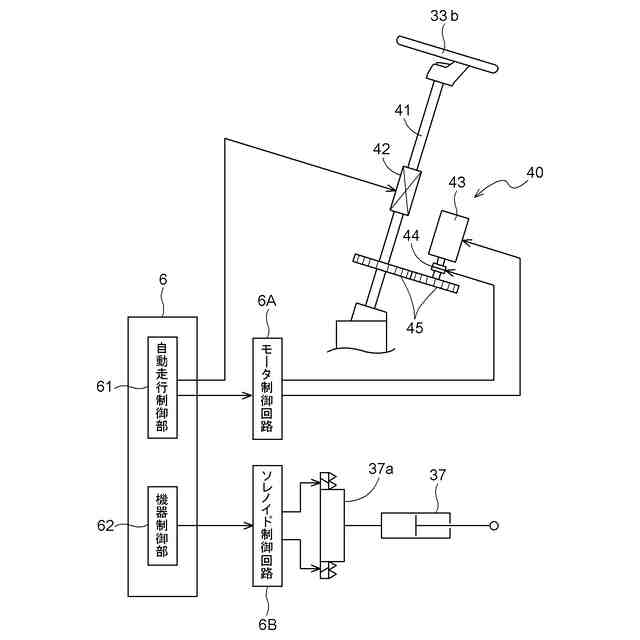
前記作業走行は自動走行制御部によって自動走行され、非作業走行は運転者によって操縦され、
前記運転支援ユニットには、前記動作タイミング情報に基づいて運転者に動作タイミングを報知するための報知情報として、運転者による操作時間を考慮して、少し早いタイミングで、非作業走行の終了または作業走行の開始を報知する報知情報生成部が含まれている圃場作業機。
発明の詳細な説明
【技術分野】
【0001】
本発明は、GPS(Global Positioning System)を備え、予め圃場に設定された目標経路に沿って自動作業走行が可能な、田植機、播種機、施肥機などの圃場作業機に関する。
続きを表示(約 3,700 文字)
【背景技術】
【0002】
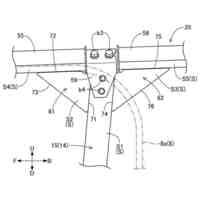
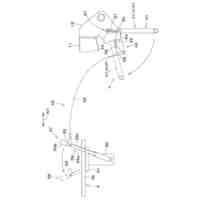
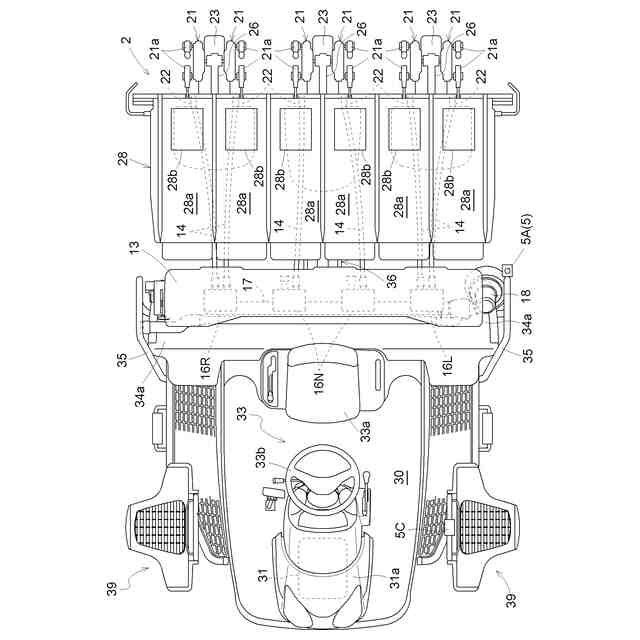
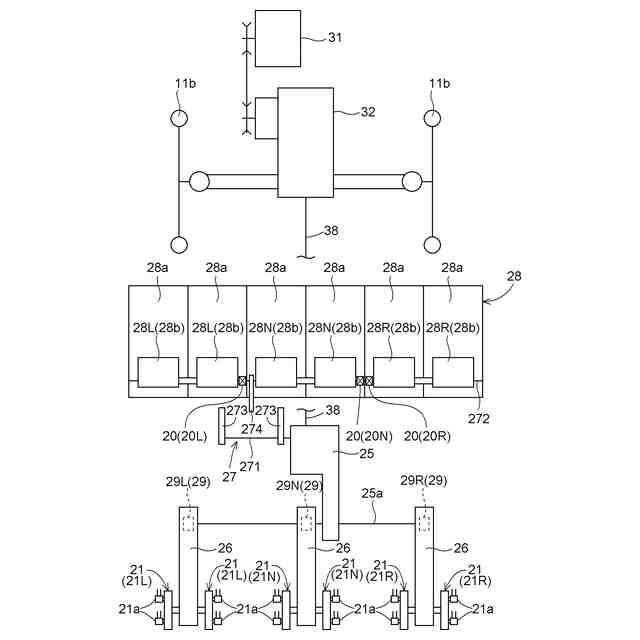
特許文献1には、ボンネットの上方に配設された門型状の取付フレームの左右両側に予備苗載台を配設し、その上部中央にGPSアンテナ操作筐体が固設された田植機が開示されている。この田植機では、GPS機能を用いた自動走行に先立って走行経路のティーチングが行われる。ティーチング時には、人がGPSアンテナ操作筐体から取り外したGPSアンテナを持って所望の経路の位置を指定する。この位置指定を通じて決定されたティーチング経路に基づいて無限直線が目標経路として生成され、この目標経路上を田植機が自動走行する。直線的な目標経路を自動走行している途中で、赤外光や超音波を用いた距離センサなどにより圃場端が検出されると、180°旋回する必要があるので、枕地の確保のため、その圃場端から予め設定した距離だけ離れた位置で、田植機は自動停止する。田植機による田植作業では、積み込んでいる苗がなくなると畦に機体を寄せて新たに苗を補給する必要がある。この田植機は、苗植付部が枕地に位置して上昇している状態で、苗つぎ警告または肥料補給警告があれば、旋回走行は行わず、圃場端に向かって自律的に直進走行をし、圃場端で停止する。
【先行技術文献】
【特許文献】
【0003】
特開2008-92818号(〔段落番号〕0028~0061、図5、図7、図8)
【発明の概要】
【発明が解決しようとする課題】
【0004】
自動走行を用いた圃場作業を、より簡単にかつ熟練を要することなく実施することができる圃場作業機が所望されている。
【課題を解決するための手段】
【0005】
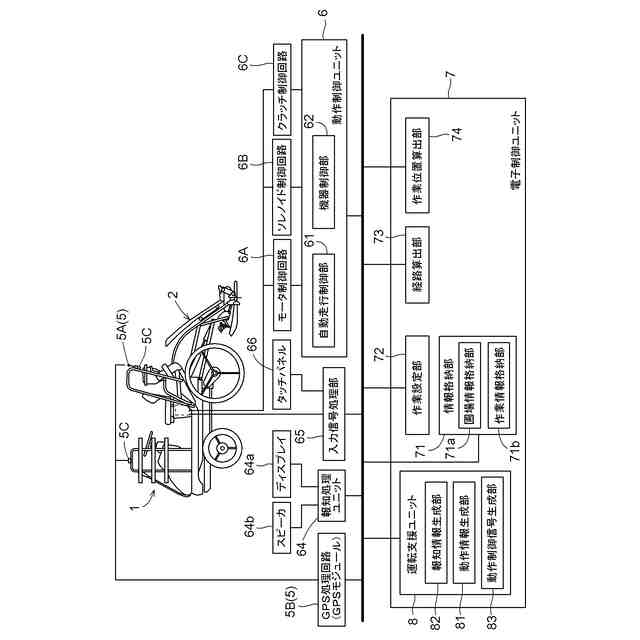
本発明による圃場作業車は、走行機体と、圃場に対する農作業を行う圃場作業装置と、測位データを出力するGPSモジュールと、前記測位データと前記圃場作業装置を用いた作業走行を行う走行経路とに基づいて運転支援を行う運転支援ユニットと、を備え、前記運転支援ユニットには、圃場の枕地において前記走行機体が作業走行経路から次の作業走行経路に向かって旋回する際に、走行機体の方向転換を伴う非作業走行経路から作業走行経路へ移行するタイミングを含む動作タイミング情報を生成する動作情報生成部が備えられ、前記作業走行は自動走行制御部によって自動走行され、非作業走行は運転者によって操縦され、前記運転支援ユニットには、前記動作タイミング情報に基づいて運転者に動作タイミングを報知するための報知情報として、運転者による操作時間を考慮して、少し早いタイミングで、非作業走行の終了または作業走行の開始を報知する報知情報生成部が含まれている。
また、本発明による圃場作業機は、走行機体と、圃場に対する農作業を行う圃場作業装置と、測位データを出力するGPSモジュールと、前記測位データと前記圃場作業装置を用いた作業走行を行う走行経路とに基づいて運転支援を行う運転支援ユニットと、を備え、前記運転支援ユニットには、圃場の枕地において前記走行機体が作業走行経路から次の作業走行経路に向かって旋回する際に、走行機体の方向転換を伴う非作業走行経路から作業走行経路へ移行するタイミングを含む動作タイミング情報を生成する動作情報生成部が備えられ、前記動作情報生成部が、前記走行機体が前記作業走行経路から次の作業走行経路に向かって旋回する際に、自機位置が前記作業走行経路から走行機体の方向転換を伴う非作業走行経路へ移行する移行タイミングを含む動作タイミング情報を生成し、前記作業走行は自動走行制御部によって自動走行され、非作業走行は運転者によって操縦され、前記運転支援ユニットには、前記動作タイミング情報に基づいて運転者に動作タイミングを報知するための報知情報として、運転者による操作時間を考慮して、少し早いタイミングで、前記動作タイミング情報に基づいて運転者に動作タイミングを報知するための報知情報として、運転者による操作時間を考慮して、少し早いタイミングで、作業走行の終了または非作業走行の開始を報知する報知情報生成部が含まれている。
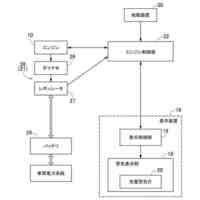
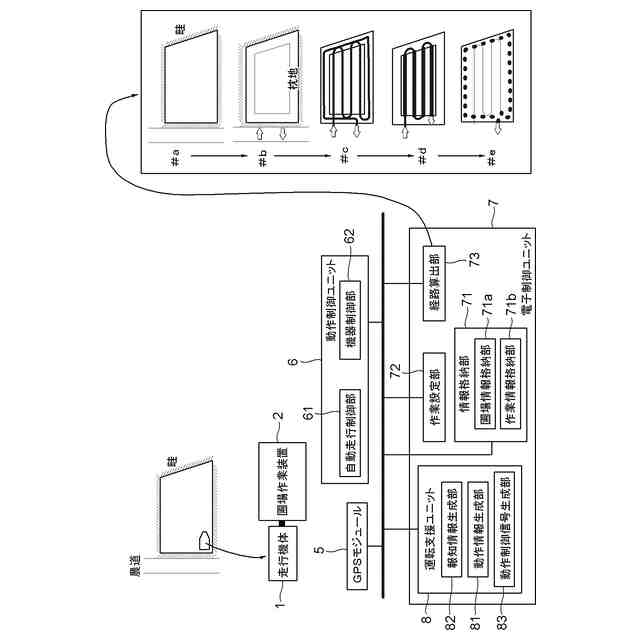
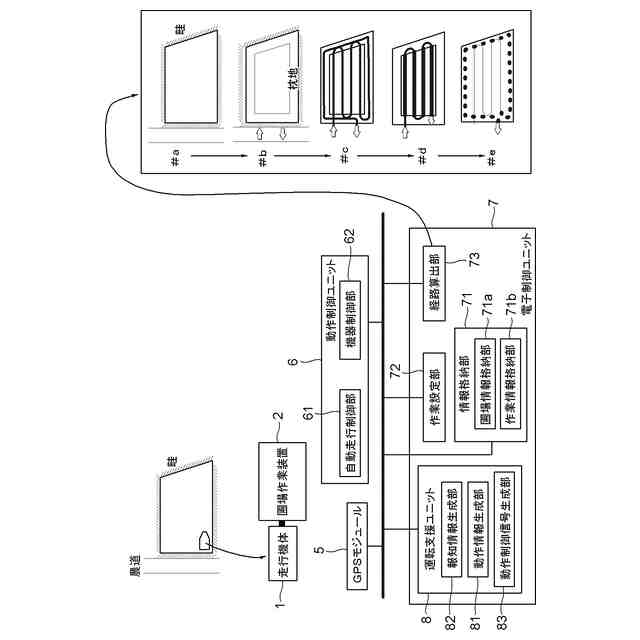
また、本発明による圃場作業機は、走行機体と、圃場に対する農作業を行う圃場作業装置と、少なくとも地形データを含む圃場情報を格納する圃場情報格納部と、前記圃場作業装置の走行方向に対する横断方向での作業幅を含む作業装置情報を格納する作業情報格納部と、走行開始地点と走行終了地点とを設定する作業設定部と、前記圃場情報と前記作業装置情報と前記走行開始地点と前記走行終了地点とに基づいて前記走行機体の方向転換を伴う非作業走行経路と前記圃場作業装置を用いた走行作業を行う作業走行経路とを含む走行経路を算出する経路算出部と、測位データを出力するGPSモジュールと、前記測位データと前記走行経路とに基づいて運転支援を行う運転支援ユニットとを備えている。
【0006】
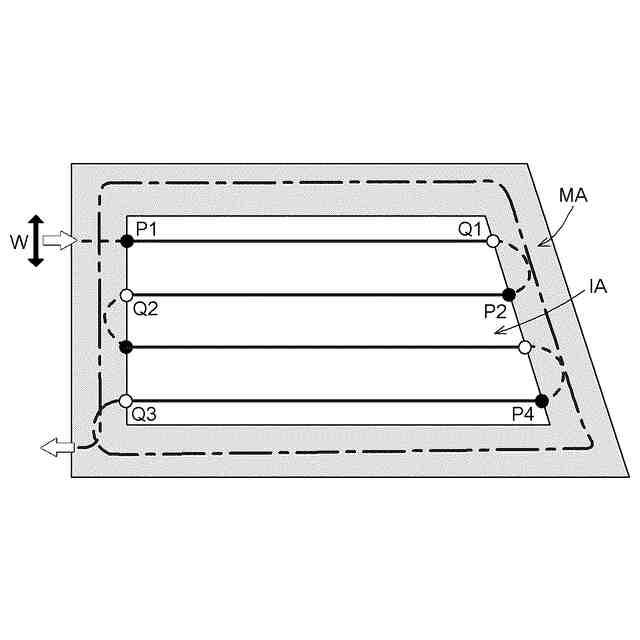
この構成によれば、圃場作業装置を用いた農作業を行うにあたって、まずは、圃場情報格納部から読み出された圃場の地形データを基本条件として、当該農作業に適した走行機体の走行経路が算定される。その際、田植や播種や施肥などの圃場に対する農作業では、直線経路または大きな曲率半径を有する直線状の走行経路(ここでは作業走行経路と呼ぶ)に沿って作業が行われ、1本の作業走行経路から次の作業走行経路に移行するために方向転換経路(非作業経路と呼ぶ)が必要となる。したがって、経路算出部は、地形データから圃場の外形を求め、当該圃場に対して、設定された走行開始地点から始まって走行終了地点で終わる、作業走行経路と非作業走行経路とからなる走行経路を算出する。また、走行経路算定には作業幅が必要となるので、用いられる圃場作業装置の作業幅も前もって作業情報格納部から読み出される。走行経路が算出されると、GPSモジュールから得られる測位データ(緯度経度データ)に基づいて自車位置を求め、経路算出部によって算出された走行経路上を走行機体が正確に走行するように運転支援ユニットがこの圃場作業機の運転を支援する。これにより、本発明による圃場作業機では、ティーチングのような煩わしい作業をすることなしに、熟練を要さなくとも質の高い圃場作業の実施が可能となる。
なお、走行開始地点と走行終了地点は、同一であってもよいし、所定の距離範囲で任意の地点(多数の地点が設定可能となる)が設定されてもよい。
【0007】
圃場には、その畦や農道から圃場に出入りするための場所が決められている場合が少なくない。そのような圃場では、前記走行開始地点が前記圃場の入口位置によって設定され、前記走行終了地点が前記圃場の出口位置によって設定される。このような圃場の入口位置及びの出口位置は、予め圃場情報に含まれていると好都合である。
【0008】
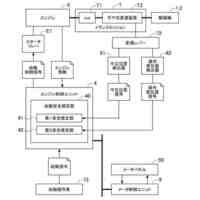
田植、播種、施肥などの圃場作業装置では、方向転換を伴う非作業走行時には、圃場作業装置の動作を停止させたり、その姿勢を非作業姿勢に変更したりする。このため、作業走行の終了点と開始点、言い換えると非作業走行の終了点と開始点では、圃場作業装置に対して何らかの操作を行わなければならない。この終了点と開始点のタイミングは、圃場作業において重要である。このため、本発明の好適な実施形態の1つでは、前記運転支援ユニットには、走行経路における前記圃場作業装置の作業開始動作点及び作業終了動作点を含む動作タイミング情報を生成する動作情報生成部が含まれている。そのような動作タイミング情報を運転者に報知し、その報知に基づいて運転者が必要な操作を行う実施形態においては、前記運転支援ユニットに、前記動作タイミング情報に基づいて運転者に動作タイミングを報知するための報知情報を生成する報知情報生成部が含まれている。また、そのような動作タイミング情報に基づく操作を自動的に行う実施形態においては、前記運転支援ユニットに、前記動作タイミング情報に基づいて前記圃場作業装置に対する動作制御信号を生成する動作制御信号生成部が含まれている。
【0009】
圃場作業に関して非熟練者であるばかりか、運転に関しても非熟練者が、圃場作業機を操縦しなければならない場合も少なくない。このような問題を解決するために、本発明の好適な実施形態の1つにおいては、前記運転支援ユニットに、前記走行経路に基づいて前記走行機体を自動走行させる自動走行制御部が含まれている。これにより、圃場作業及び圃場作業機の運転に不慣れであっても、安定した圃場作業を行うことができる。
【0010】
圃場の形状が、長方形のような基本形状であれば、適切な走行経路は一義的に求まるが、変形した形状であれば、最適な走行経路を算定することが困難なのである。そのような場合の好適な解決策は、経路算出部が複数の走行経路を算出し、その複数の走行経路から運転者が最適なものと1つ選択するようにすればよい。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社クボタ
作業車
17日前
株式会社クボタ
作業機
1か月前
株式会社クボタ
作業車
26日前
株式会社クボタ
作業車
9日前
株式会社クボタ
作業車
8日前
株式会社クボタ
作業車
9日前
株式会社クボタ
作業車
8日前
株式会社クボタ
作業車
17日前
株式会社クボタ
作業車
1日前
株式会社クボタ
作業車
1か月前
株式会社クボタ
移植機
9日前
株式会社クボタ
作業車
24日前
株式会社クボタ
作業車
24日前
株式会社クボタ
作業車
16日前
株式会社クボタ
作業車
2日前
株式会社クボタ
作業車
16日前
株式会社クボタ
作業車
16日前
株式会社クボタ
作業車
1日前
株式会社クボタ
移植機
9日前
株式会社クボタ
作業車両
26日前
株式会社クボタ
作業車両
26日前
株式会社クボタ
作業車両
26日前
株式会社クボタ
作業車両
26日前
株式会社クボタ
作業車両
26日前
株式会社クボタ
作業車両
26日前
株式会社クボタ
作業車両
26日前
株式会社クボタ
作業車両
26日前
株式会社クボタ
作業車両
26日前
株式会社クボタ
作業車両
16日前
株式会社クボタ
作業車両
16日前
株式会社クボタ
作業車両
1日前
株式会社クボタ
作業車両
1日前
株式会社クボタ
作業車両
2日前
株式会社クボタ
豆類選別機
11日前
株式会社クボタ
コンバイン
17日前
株式会社クボタ
多目的車両
8日前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ