TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025156945
公報種別
公開特許公報(A)
公開日
2025-10-15
出願番号
2024059725
出願日
2024-04-02
発明の名称
経路設定方法、移動体、管理システム及びプログラム
出願人
三菱重工業株式会社
代理人
弁理士法人酒井国際特許事務所
主分類
G05D
1/622 20240101AFI20251007BHJP(制御;調整)
要約
【課題】移動体の経路を適切に設定することができる経路設定方法、移動体、管理システム及びプログラムを提供すること。
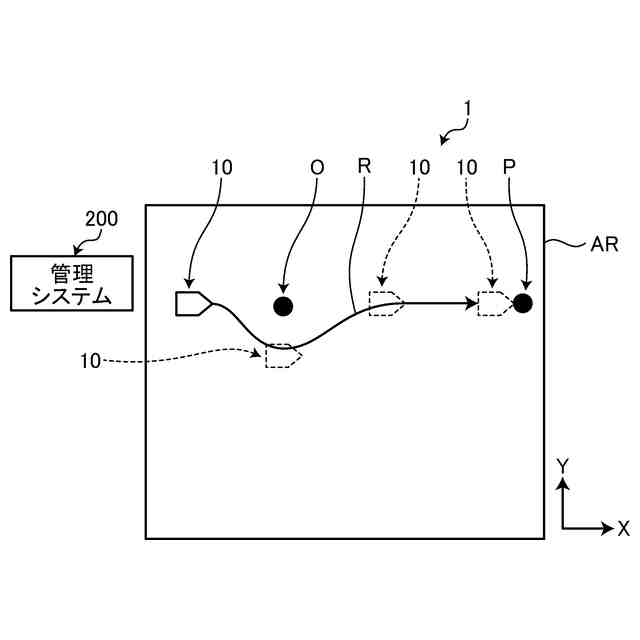
【解決手段】本開示に係る移動体の経路設定方法は、移動体の目的位置の情報を取得するステップと、障害物の位置の情報を取得するステップと、移動体の経路計算を実行するステップと、を含み、経路計算を実行するステップは、移動体の形状に関する情報に基づいて、移動体が占める領域を含む占有領域に重なり、かつ、複数の円形又は楕円形の単位領域の一部同士が重畳した形状の、移動体領域を設定するステップと、障害物の位置の情報に基づき、障害物が移動体領域と重ならず目的位置に向かう経路を、移動体の経路として設定するステップと、を含む。
【選択図】図4
特許請求の範囲
【請求項1】
移動体の目的位置の情報を取得するステップと、
障害物の位置の情報を取得するステップと、
移動体の経路計算を実行するステップと、を含み、
前記経路計算を実行するステップは、
前記移動体の形状に関する情報に基づいて、前記移動体が占める領域を含む占有領域に重なり、かつ、複数の円形又は楕円形の単位領域の一部同士が重畳した形状の、移動体領域を設定するステップと、
前記障害物の位置の情報に基づき、前記障害物が前記移動体領域と重ならず前記目的位置に向かう経路を、前記移動体の経路として設定するステップと、
を含む、
経路設定方法。
続きを表示(約 1,800 文字)
【請求項2】
前記経路計算を実行するステップにおいては、
前記移動体の位置、前記移動体領域、及び前記障害物の位置に基づき、前記障害物の位置が、前記移動体領域の範囲外となる旨の制約条件を設定するステップと、
前記移動体の位置と前記目的位置との差が小さくなるほど評価が高くなる評価関数と、前記制約条件とに基づき最適化計算を行い、前記移動体の経路を計算するステップと、を含む、
請求項1に記載の経路設定方法。
【請求項3】
前記移動体領域を設定するステップでは、前記移動体が占める領域に重なる前記単位領域である第1単位領域と、前記移動体の進行方向側の前方領域に重なる前記単位領域である第2単位領域と、前記移動体の進行方向と反対側の後方領域に重なる前記単位領域である第3単位領域とを含み、かつ前記第1単位領域と前記第2単位領域と前記第3単位領域との少なくとも2つ同士が互いに重なるように、前記移動体領域を設定する、
請求項1又は請求項2に記載の経路設定方法。
【請求項4】
前記移動体領域を設定するステップは、
前記移動体領域に含まれる前記単位領域の数を設定するステップと、
前記占有領域を前記単位領域と同数の単位占有領域に区分するステップと、
それぞれの前記単位占有領域について、前記単位領域が、前記単位占有領域の周縁上の位置と重なることを制約条件とし、前記単位領域の面積を評価関数として設定して、前記制約条件を守ったうえで前記評価関数を最小とする最適化計算を実行して、それぞれの前記単位領域の位置及び大きさを設定して、前記移動体領域を設定するステップと、
を含む、
請求項1又は請求項2に記載の経路設定方法。
【請求項5】
前記移動体領域を設定するステップにおいては、前記障害物が前記移動体領域と重ならず前記目的位置に向かう経路が設定できない場合には、前記単位領域の数を増加させて、前記移動体領域を再設定し、
前記経路計算を実行するステップにおいては、再設定された前記移動体領域に基づいて、前記移動体の経路を設定する、
請求項4に記載の経路設定方法。
【請求項6】
前記移動体領域を設定するステップにおいては、
前記移動体の予定速度に基づいて、前記予定速度が高くなるほど広くなるように、前記占有領域を設定しており、
前記障害物が前記移動体領域と重ならず前記目的位置に向かう経路が設定できない場合には、前記予定速度を低下させて前記占有領域を再設定し、再設定した前記占有領域に基づいて前記移動体領域を再設定し、
前記経路計算を実行するステップにおいては、
再設定された前記移動体領域に基づいて、前記移動体の経路を設定する、
請求項4に記載の経路設定方法。
【請求項7】
前記移動体領域を設定するステップにおいては、
前記単位領域の長軸半径の上下限値、及び短軸半径の上下限値を前記制約条件としてさらに設定する、
請求項4に記載の経路設定方法。
【請求項8】
前記移動体領域を設定するステップは、
前記単位領域の少なくとも1つが、前記占有領域の周縁上の位置と重なることを制約条件とし、前記移動体領域と前記占有領域との差分を評価関数として設定するステップと、
前記制約条件を守ったうえで前記評価関数を最小とする最適化計算を実行して、それぞれの前記単位領域の数、大きさ及び位置を設定して、前記移動体領域を設定する、
請求項1又は請求項2に記載の経路設定方法。
【請求項9】
請求項1又は請求項2に記載の経路設定方法で設定された前記経路に従って前記移動体を移動させる、
移動体。
【請求項10】
障害物の位置の情報に基づき設定された、前記障害物が移動体領域と重ならず目的位置に向かう経路を取得する経路取得部と、
前記経路に従って移動体を移動させる移動制御部と、
を含み、
前記移動体領域は、前記移動体の形状に関する情報に基づいて設定された、前記移動体が占める領域を含む占有領域に重なり、かつ、複数の円形又は楕円形の単位領域の一部同士が重畳した形状の領域である、
移動体。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、経路設定方法、移動体、管理システム及びプログラムに関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
移動体を目的位置まで自律的に移動させるために、様々な計算を行うことによって移動体の移動経路が設定され、それに基づいて移動体が自律的に動作することにより、移動体が自律的に移動する。
【0003】
例えば、下記の特許文献1には、自律移動体の占有領域を単一の楕円で近似し、その楕円内にすべての障害物が内包されないことを制約とし、一定時刻先までの将来に渡って制約を守るように最適化問題を解くことで、障害物回避経路を生成する旨が記載されている。
【先行技術文献】
【特許文献】
【0004】
特開2022-134905号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ここで、移動体の占有領域を大きく設定すると、障害物を回避する経路を設定する場合に、設定可能な経路の制限度合いが高くなる場合がある。従って、移動体の経路を適切に設定することが求められている。
【0006】
本開示は上記課題を鑑み、移動体の経路を適切に設定することができる経路設定方法、移動体、管理システム及びプログラムを提供することを目的とする。
【課題を解決するための手段】
【0007】
上述した課題を解決し、目的を達成するために、本開示に係る経路設定方法は、移動体の目的位置の情報を取得するステップと、障害物の位置の情報を取得するステップと、移動体の経路計算を実行するステップと、を含み、前記経路計算を実行するステップは、前記移動体の形状に関する情報に基づいて、前記移動体が占める領域を含む占有領域に重なり、かつ、複数の円形又は楕円形の単位領域の一部同士が重畳した形状の、移動体領域を設定するステップと、前記障害物の位置の情報に基づき、前記障害物が前記移動体領域と重ならず前記目的位置に向かう経路を、前記移動体の経路として設定するステップと、を含む。
【0008】
上述した課題を解決し、目的を達成するために、本開示に係る移動体は、障害物の位置の情報に基づき設定された、前記障害物が移動体領域と重ならず目的位置に向かう経路を取得する経路取得部と、前記経路に従って移動体を移動させる移動制御部と、を含み、前記移動体領域は、前記移動体の形状に関する情報に基づいて設定された、前記移動体が占める領域を含む占有領域に重なり、かつ、複数の円形又は楕円形の単位領域の一部同士が重畳した形状の領域である。
【0009】
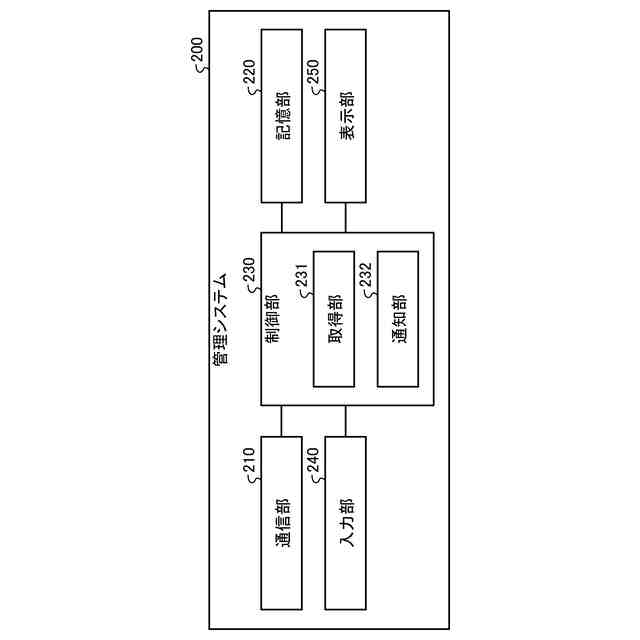
上述した課題を解決し、目的を達成するために、本開示に係る管理システムは、経路設定方法により設定した前記経路を前記移動体に送信する。
【0010】
上述した課題を解決し、目的を達成するために、本開示に係るプログラムは、移動体の目的位置の情報を取得するステップと、障害物の位置の情報を取得するステップと、移動体の経路計算を実行するステップと、を、コンピュータに実行させるプログラムであって、前記経路計算を実行するステップは、前記移動体の形状に関する情報に基づいて、前記移動体が占める領域を含む占有領域に重なり、かつ、複数の円形又は楕円形の単位領域の一部同士が重畳した形状の、移動体領域を設定するステップと、前記障害物の位置の情報に基づき、前記障害物が前記移動体領域と重ならず前記目的位置に向かう経路を、前記移動体の経路として設定するステップと、を含む。
【発明の効果】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
三菱重工業株式会社
加熱装置
今日
三菱重工業株式会社
皮膜形成装置
7日前
三菱重工業株式会社
ポンプシステム
7日前
三菱重工業株式会社
メタン酸化触媒装置
7日前
三菱重工業株式会社
ガスタービン制御方法
今日
三菱重工業株式会社
炭化炉及びその制御方法
7日前
三菱重工業株式会社
バーナ及びこれを備えたボイラ
7日前
三菱重工業株式会社
バーナ及びこれを備えたボイラ
7日前
三菱重工業株式会社
燃料噴射装置および往復動内燃機関
1日前
三菱重工業株式会社
水素製造システム及び水素製造方法
7日前
三菱重工業株式会社
渦電流探傷装置、及び渦電流探傷方法
7日前
三菱重工業株式会社
電解セルカートリッジおよびその製造方法
2日前
三菱重工業株式会社
電解モジュールの冷却方法及び電解システム
7日前
三菱重工業株式会社
接着剤の膜厚測定方法、および接合部材の製造方法
2日前
三菱重工業株式会社
制御装置、CO2回収装置、制御方法及びプログラム
今日
三菱重工業株式会社
経路設定方法、移動体、管理システム及びプログラム
2日前
三菱重工業株式会社
劣化判定装置、劣化判定システム、および、劣化判定方法
今日
三菱重工業株式会社
タービン架台及びタービン装置並びにタービン架台の製造方法
7日前
三菱重工業株式会社
粉砕テーブル及び固体燃料粉砕装置並びに粉砕テーブルの補修方法
7日前
三菱重工業株式会社
制御装置、ガスタービンの燃料供給系統、制御方法及びプログラム
3日前
三菱重工業株式会社
船舶の積み付け計画作成装置、船舶の積み付け計画作成方法、およびプログラム
今日
三菱重工業株式会社
熱電併給用蒸気生成システム及び熱電併給システム並びに熱電併給用蒸気生成方法
7日前
三菱重工業株式会社
ガスタービン制御装置、ガスタービン制御方法、及び、ガスタービン制御プログラム
3日前
三菱重工業株式会社
放射性廃棄物収納用セパレータ、放射性廃棄物収納容器および放射性廃棄物収納方法
3日前
三菱重工業株式会社
炭素強度演算装置、これを用いた合成燃料製造プラント、炭素強度演算方法及び炭素強度演算プログラム
7日前
三菱重工業株式会社
CO2回収装置用蒸気生成システム及びこれを備えたCO2回収装置並びにCO2回収装置用蒸気生成方法
7日前
個人
生産早送り装置
2か月前
株式会社豊田自動織機
産業車両
1か月前
株式会社カネカ
製造システム
1か月前
オムロン株式会社
スレーブ装置
18日前
ローム株式会社
基準電圧源
1か月前
株式会社熊谷組
障害物の検出方法
9日前
愛知製鋼株式会社
車両用システム
1か月前
個人
作業車両自動化システム
2か月前
新電元工業株式会社
作業用ロボット
7日前
愛知製鋼株式会社
目標軌跡の設定方法
2か月前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ