TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025155677
公報種別
公開特許公報(A)
公開日
2025-10-14
出願番号
2024193683
出願日
2024-11-05
発明の名称
3次元計測装置、部品実装装置、及び3次元計測方法
出願人
JUKI株式会社
代理人
弁理士法人酒井国際特許事務所
主分類
G01B
11/25 20060101AFI20251002BHJP(測定;試験)
要約
【課題】3次元計測装置による部品の認識性能を向上すること。
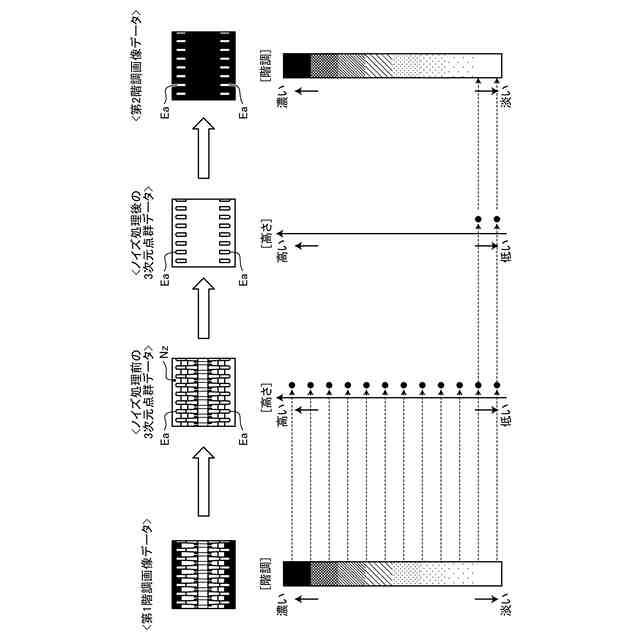
【解決手段】3次元計測装置は、ボディ部と複数の電極部とを有する部品にパターン光を照射する投影装置と、パターン光が照射された部品を撮像する撮像装置と、撮像装置により撮像された部品の画像データを処理するプロセッサを有する処理装置と、を備える。処理装置は、画像データから部品の形状を濃淡で示す第1階調画像データを生成し、第1階調画像データを部品の3次元点群データに変換し、3次元点群データからノイズを除去して電極部を抽出し、ノイズが除去された3次元点群データを第2階調画像データに変換し、第2階調画像データにおける複数の電極部のそれぞれの座標に基づいて、部品の基準位置を算出する。
【選択図】図16
特許請求の範囲
【請求項1】
ボディ部と複数の電極部とを有する部品にパターン光を照射する投影装置と、
前記パターン光が照射された前記部品を撮像する撮像装置と、
前記撮像装置により撮像された前記部品の画像データを処理するプロセッサを有する処理装置と、を備え、
前記処理装置は、
前記画像データから前記部品の形状を濃淡で示す第1階調画像データを生成し、
前記第1階調画像データを前記部品の3次元点群データに変換し、
前記3次元点群データからノイズを除去して前記電極部を抽出し、
前記ノイズが除去された3次元点群データを第2階調画像データに変換し、
前記第2階調画像データにおける複数の前記電極部のそれぞれの座標に基づいて、前記部品の基準位置を算出する、
3次元計測装置。
続きを表示(約 1,200 文字)
【請求項2】
前記撮像装置は、前記撮像装置の光学系の焦点と前記電極部とを一致させた状態で前記部品を撮像し、
前記処理装置は、前記焦点の位置に基づいて、前記3次元点群データから前記電極部を抽出する、
請求項1に記載の3次元計測装置。
【請求項3】
前記処理装置は、前記3次元点群データから、前記ノイズとして前記ボディ部を除去する、
請求項2に記載の3次元計測装置。
【請求項4】
前記撮像装置は、前記撮像装置の光学系の焦点と複数の電極部のうち少なくとも一部の電極部とを一致させた状態で前記部品を撮像し、
前記処理装置は、前記焦点付近の所定範囲に存在する前記電極部の3次元点群データに基づいて、前記部品の傾きを算出し、
前記部品の傾きを考慮して、前記3次元点群データから前記電極部を抽出する、
請求項1に記載の3次元計測装置。
【請求項5】
前記処理装置は、前記部品の傾きに基づいて、前記電極部の3次元点群データに複数の分割領域を設定し、
複数の前記分割領域のそれぞれについて、前記電極部の基準高さを設定し、
前記基準高さに基づいて、複数の前記分割領域のそれぞれの3次元点群データから前記電極部を抽出する、
請求項4に記載の3次元計測装置。
【請求項6】
前記処理装置は、前記3次元点群データから、前記ノイズとして前記ボディ部を除去する、
請求項5に記載の3次元計測装置。
【請求項7】
請求項1に記載の3次元計測装置と、
前記部品を保持するノズルを有する実装ヘッドと、を備え、
前記3次元計測装置は、前記ノズルに保持された前記部品を計測し、
前記実装ヘッドは、前記3次元計測装置により算出された前記部品の基準位置に基づいて、基板の目標位置に前記部品を実装する、
部品実装装置。
【請求項8】
前記処理装置は、前記第2階調画像データに基づいて、前記実装ヘッドの制御に使用される生産プログラムを生成する、
請求項7に記載の部品実装装置。
【請求項9】
位相シフト法に基づいて、ボディ部と複数の電極部とを有する部品の画像データを取得し、
前記画像データから前記部品の形状を濃淡で示す第1階調画像データを生成し、
前記第1階調画像データを前記部品の3次元点群データに変換し、
前記3次元点群データからノイズを除去して前記電極部を抽出し、
前記ノイズが除去された3次元点群データを第2階調画像データに変換し、
前記第2階調画像データにおける複数の前記電極部のそれぞれの座標に基づいて、前記部品の基準位置を算出する、
3次元計測方法。
発明の詳細な説明
【技術分野】
【0001】
本明細書で開示する技術は、3次元計測装置、部品実装装置、及び3次元計測方法に関する。
続きを表示(約 2,200 文字)
【背景技術】
【0002】
部品実装装置に係る技術分野において、特許文献1に開示されているような、3次元計測装置を備える部品実装装置が知られている。特許文献1において、3次元計測装置は、位相シフト法に基づいて部品の3次元形状を計測する。
【先行技術文献】
【特許文献】
【0003】
特開2023-054992号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
部品実装装置は、3次元計測装置により部品の基準位置(例えば中心位置)を認識し、部品の基準位置に基づいて、基板の目標位置に部品を実装する。そのため、3次元計測装置による部品の認識性能を向上することが要望される。
【課題を解決するための手段】
【0005】
本明細書は、3次元計測装置を開示する。3次元計測装置は、ボディ部と複数の電極部とを有する部品にパターン光を照射する投影装置と、パターン光が照射された部品を撮像する撮像装置と、撮像装置により撮像された部品の画像データを処理するプロセッサを有する処理装置と、を備える。処理装置は、画像データから部品の形状を濃淡で示す第1階調画像データを生成し、第1階調画像データを部品の3次元点群データに変換し、3次元点群データからノイズを除去して電極部を抽出し、ノイズが除去された3次元点群データを第2階調画像データに変換し、第2階調画像データにおける複数の電極部のそれぞれの座標に基づいて、部品の基準位置を算出する。
【発明の効果】
【0006】
本明細書で開示する技術によれば、3次元計測装置による部品の認識性能が向上する。
【図面の簡単な説明】
【0007】
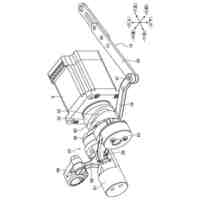
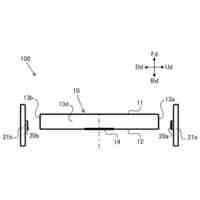
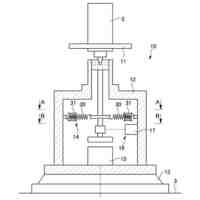
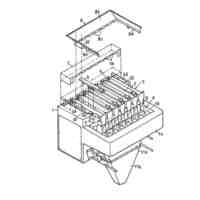
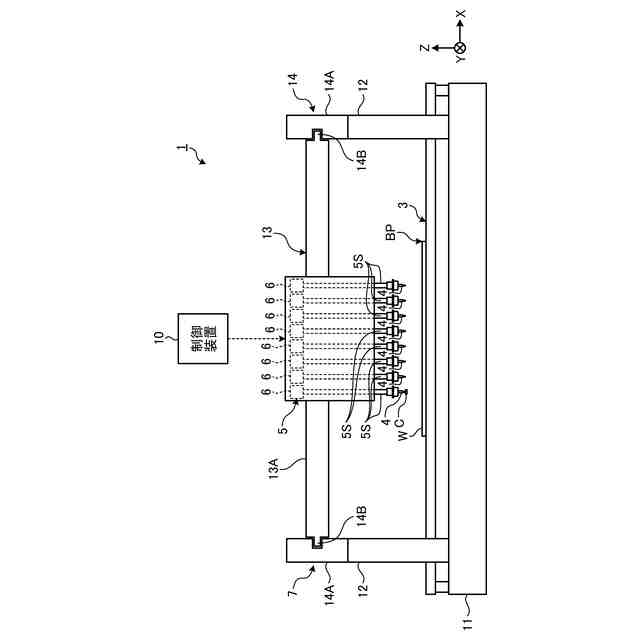
図1は、第1実施形態に係る部品実装装置を模式的に示す側面図である。
図2は、第1実施形態に係る部品実装装置を模式的に示す平面図である。
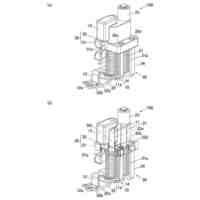
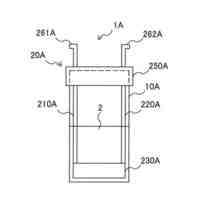
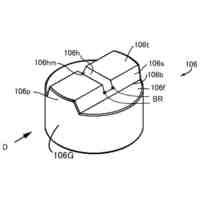
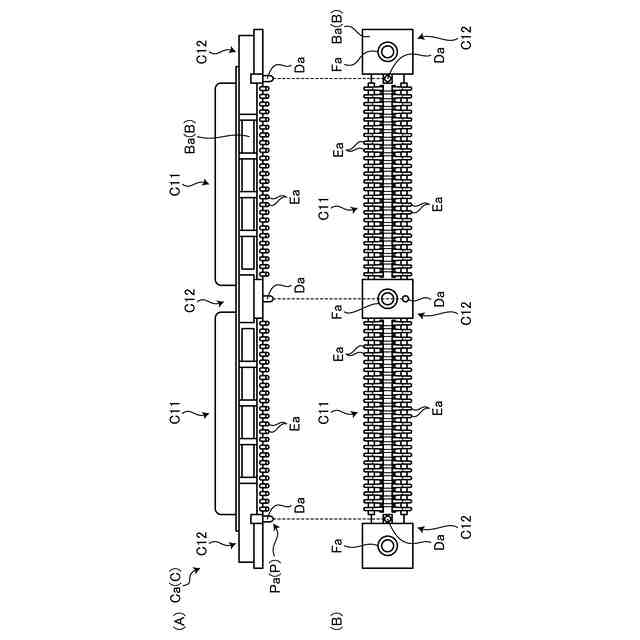
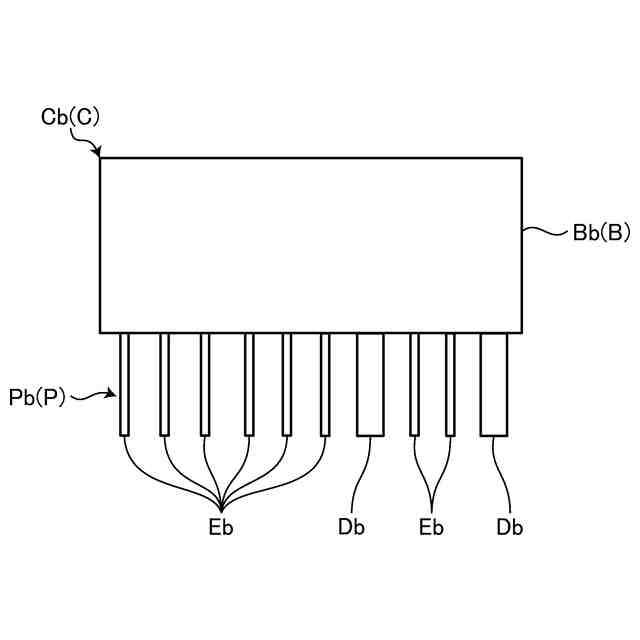
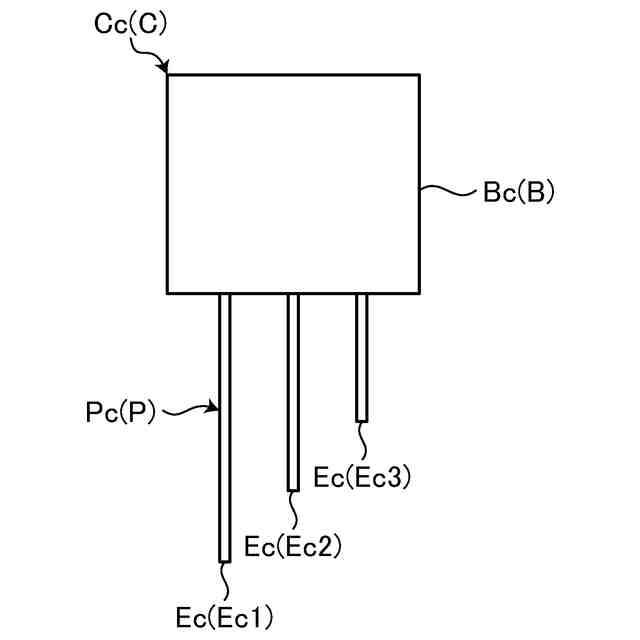
図3は、第1実施形態に係る部品を示す図である。
図4は、第1実施形態に係る部品を示す図である。
図5は、第1実施形態に係る部品を示す図である。
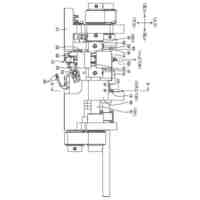
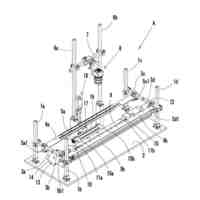
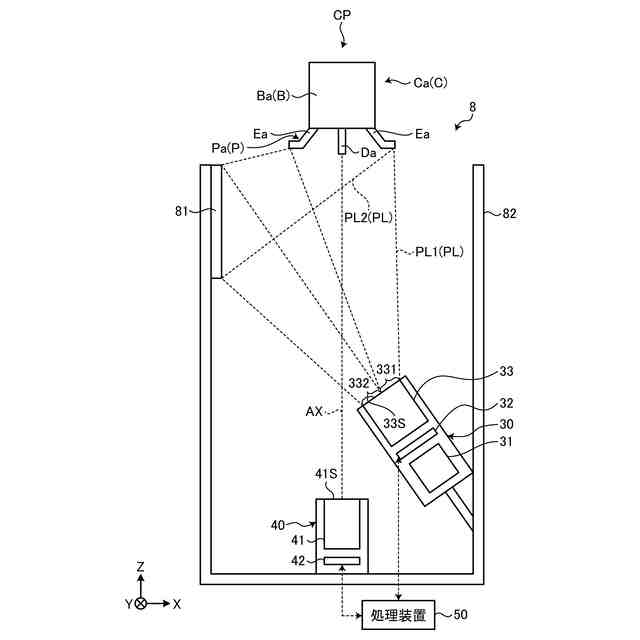
図6は、第1実施形態に係る3次元計測装置を模式的に示す側面図である。
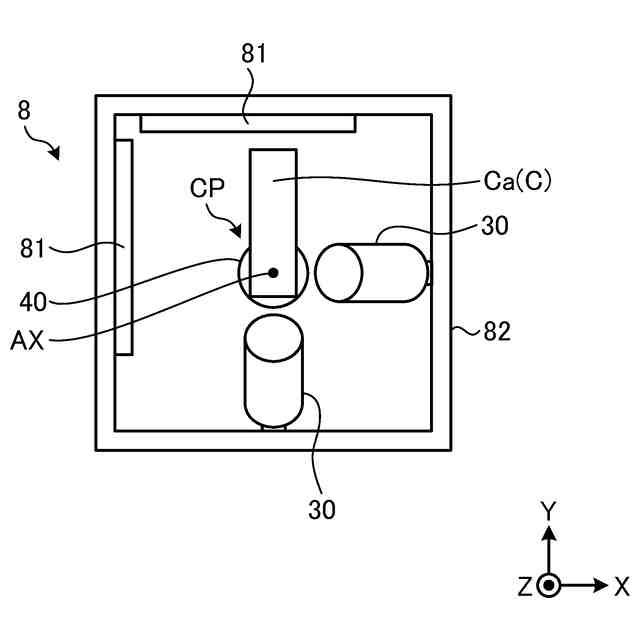
図7は、第1実施形態に係る3次元計測装置を模式的に示す上面図である。
図8は、第1実施形態に係る処理装置を示すハードウエア構成図である。
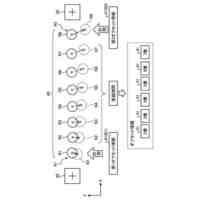
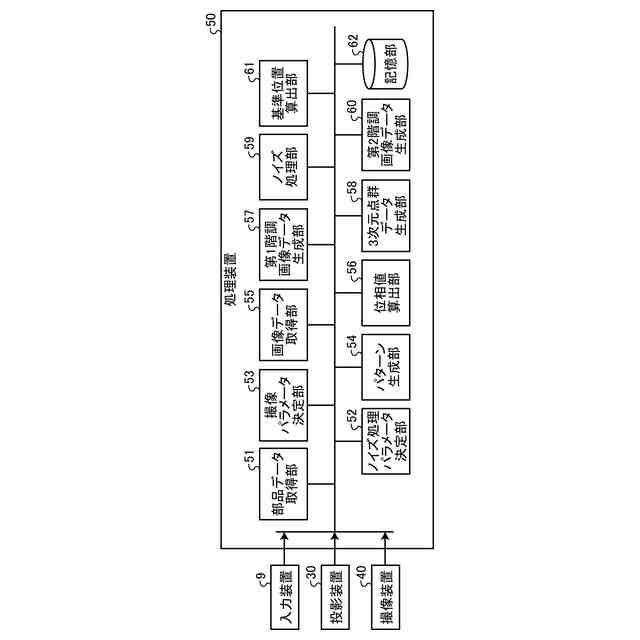
図9は、第1実施形態に係る処理装置を示す機能ブロック図である。
図10は、第1実施形態に係る部品データを説明する図である。
図11は、第1実施形態に係るノイズ処理を説明する図である。
図12は、第1実施形態に係るノイズ処理を説明する図である。
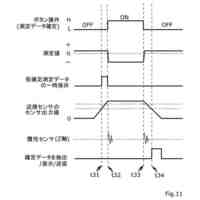
図13は、第1実施形態に係る撮像パラメータを説明する図である。
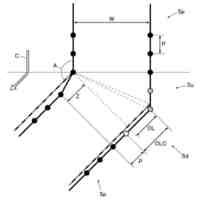
図14は、第1実施形態に係る撮像パラメータの決定方法を説明する図である。
図15は、第1実施形態に係るパターンデータを示す図である。
図16は、第1実施形態に係る部品の処理方法を説明する図である。
図17は、第1実施形態に係る部品のノイズ処理を説明する図である。
図18は、第1実施形態に係る部品のノイズ処理を説明する図である。
図19は、第1実施形態に係る部品の第2階調画像データを示す図である。
図20は、第1実施形態に係る部品のノイズ処理を説明する図である。
図21は、第1実施形態に係る部品の第2階調画像データを示す図である。
図22は、第2実施形態に係る部品のノイズ処理を説明する図である。
図23は、第2実施形態に係る部品のノイズ処理を示すフローチャートである。
図24は、第2実施形態に係る基準高さ及び高さ範囲を説明する図である。
図25は、第3実施形態に係る生産プログラム生成方法を示すフローチャートである。
【発明を実施するための形態】
【0008】
以下、本開示に係る実施形態について図面を参照しながら説明するが、本開示は実施形態に限定されない。以下で説明する実施形態の構成要素は、適宜組み合わせることができる。また、一部の構成要素を用いない場合もある。
【0009】
実施形態においては、部品実装装置1にローカル座標系を設定し、ローカル座標系を参照しながら各部の位置関係について説明する。ローカル座標系として、XYZ直交座標系を設定する。所定面内においてX軸に平行な方向をX軸方向とする。所定面内においてX軸と直交するY軸に平行な方向をY軸方向とする。X軸及びY軸のそれぞれと直交するZ軸に平行な方向をZ軸方向とする。X軸を中心とする回転方向又は傾斜方向をθX方向とする。Y軸を中心とする回転方向又は傾斜方向をθY方向とする。Z軸を中心とする回転方向又は傾斜方向をθZ方向とする。所定面は、XY平面である。Z軸は、所定面と直交する。実施形態において、所定面は、水平面に平行であることとする。Z軸方向は、鉛直方向(高さ方向)である。+Z方向(+Z側)は上方(上側)であり、-Z方向(-Z側)は下方(下側)である。なお、所定面が水平面に対して傾斜していてもよい。
【0010】
[第1実施形態]
第1実施形態について説明する。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
JUKI株式会社
ミシン
1か月前
JUKI株式会社
ミシン
1か月前
JUKI株式会社
ミシン
2か月前
JUKI株式会社
ミシン
3か月前
JUKI株式会社
ゴム繋ぎ装置
1か月前
JUKI株式会社
ミシンの布押え
1か月前
JUKI株式会社
差動送りミシン
2か月前
JUKI株式会社
取得装置及び二本針ミシン
1か月前
JUKI株式会社
部品実装装置及びオフセット情報取得方法
1か月前
JUKI株式会社
3次元計測装置、部品実装装置、及び3次元計測方法
1か月前
JUKI株式会社
3次元計測装置、部品実装装置、及び3次元計測方法
1か月前
JUKI株式会社
3次元計測装置、部品実装装置、及び3次元計測方法
1か月前
個人
視触覚センサ
今日
日本精機株式会社
検出装置
1か月前
個人
採尿及び採便具
1か月前
個人
計量機能付き容器
25日前
個人
高精度同時多点測定装置
1か月前
株式会社カクマル
境界杭
15日前
甲神電機株式会社
電流検出装置
1か月前
株式会社ミツトヨ
測定器
1か月前
日本精機株式会社
発光表示装置
8日前
ユニパルス株式会社
トルク変換器
今日
株式会社トプコン
測量装置
7日前
ユニパルス株式会社
トルク変換器
今日
ユニパルス株式会社
トルク変換器
今日
アズビル株式会社
電磁流量計
1か月前
大成建設株式会社
風洞実験装置
25日前
ローム株式会社
半導体装置
1か月前
個人
計量具及び計量機能付き容器
25日前
日本信号株式会社
距離画像センサ
28日前
愛知電機株式会社
軸部材の外観検査装置
1か月前
ローム株式会社
半導体装置
1か月前
大和製衡株式会社
組合せ計量装置
1か月前
日本特殊陶業株式会社
ガスセンサ
7日前
大和製衡株式会社
組合せ計量装置
1か月前
個人
システム、装置及び実験方法
1か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ