TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025154409
公報種別
公開特許公報(A)
公開日
2025-10-10
出願番号
2024057392
出願日
2024-03-29
発明の名称
交通安全支援システム
出願人
本田技研工業株式会社
代理人
個人
,
個人
主分類
G08G
1/09 20060101AFI20251002BHJP(信号)
要約
【課題】鞍乗型車両のライダーに対し、交差点への進入時における安全確認行動を適切に履行させることができる安全運転支援システムを提供すること。
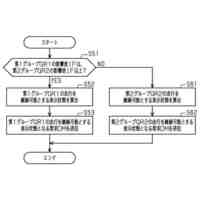
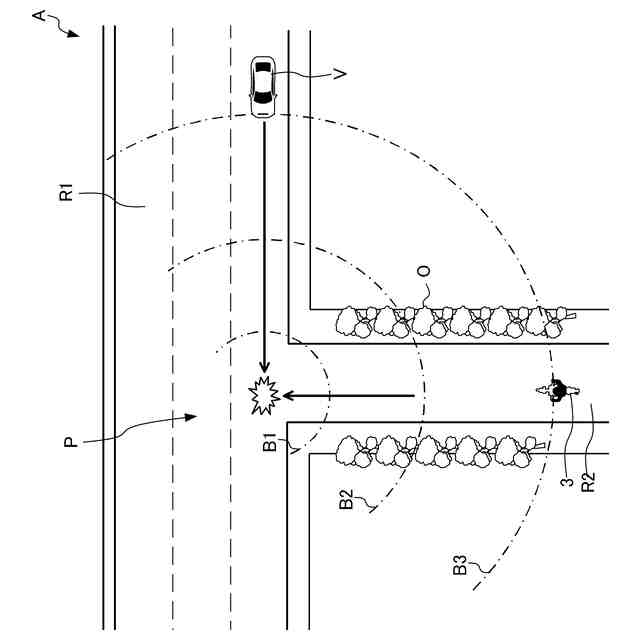
【解決手段】交通安全支援システムは、自動二輪車3のライダーの頭部運動状態情報に基づいて所定のアナログ通知作動条件の成立の有無を判定するリスク通知設定ユニットと、アナログ通知作動条件が成立したと判定された場合、アナログ通知モードで自動二輪車3に搭載されたHMIを作動させるリスク通知制御装置と、を備える。リスク通知設定ユニットは、他車両Vが移動する第1道路R1と自動二輪車3が移動する第2道路R2とが各々の進行方向前方の特定交差点Pにおいて交差しかつ自動二輪車3が特定交差点Pを中心として定められたアナログ通知作動範囲B2内に存在する間に、ライダーによる他車両Vに対する安全確認行動が履行されなかった場合、アナログ通知作動条件が成立したと判定する。
【選択図】図4
特許請求の範囲
【請求項1】
鞍乗型車両である支援対象のライダーによる運転を支援する交通安全支援システムであって、
前記支援対象の周囲における交通参加者及び交通環境を認識する認識手段と、
前記ライダーが認知可能な態様で作動するマンマシンインターフェースと、
前記ライダーの頭部運動状態情報を取得する運転特性取得手段と、
前記認識手段によって前記支援対象又は前記支援対象の進行方向前方を中心とする第1範囲外に他移動体の存在が認識されている間、前記認識手段による認識結果及び前記頭部運動状態情報に基づいて第1通知作動条件の成立の有無を判定する判定手段と、
前記判定手段によって前記第1通知作動条件が成立したと判定された場合、第1通知態様で前記マンマシンインターフェースを作動させる通知制御手段と、を備え、
前記判定手段は、
前記他移動体が移動する第1道路と前記支援対象が移動する第2道路とが各々の進行方向前方の特定交差点において交差する場合であり、かつ
前記支援対象が前記特定交差点を中心として定められかつ前記第1範囲を包含する第2範囲内に存在する間に、前記ライダーによる前記他移動体に対する確認行動が行われなかった場合、前記第1通知作動条件が成立したと判定することを特徴とする安全運転支援システム。
続きを表示(約 1,000 文字)
【請求項2】
前記判定手段は、前記認識手段による認識結果及び前記頭部運動状態情報に基づいて、前記ライダーの頭部が前記進行方向前方から前記他移動体側へ向けられた確認回数及び前記頭部が前記他移動体側へ向けられた確認時間の少なくとも何れかを取得し、前記確認回数及び前記確認時間の少なくとも何れかに基づいて前記確認行動の有無を判定することを特徴とする請求項1に記載の安全運転支援システム。
【請求項3】
前記特定交差点には、信号機が設置されていないこと特徴とする請求項2に記載の安全運転支援システム。
【請求項4】
前記第2道路は、前記第1道路よりも道路幅が狭いことを特徴とする請求項3に記載の安全運転支援システム。
【請求項5】
前記第2道路は、前記第1道路よりも車線数が少ないことを特徴とする請求項3に記載の安全運転支援システム。
【請求項6】
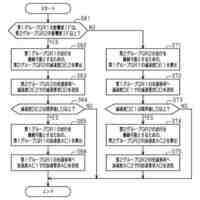
前記通知制御手段は、前記判定手段によって第2通知作動条件が成立したと判定された場合、前記第1通知態様よりも通知強度が低い第2通知態様で前記マンマシンインターフェースを作動させ、
前記判定手段は、前記支援対象が前記特定交差点を中心として定められかつ前記第2範囲を包含する第3範囲内に進入した場合、前記第2通知作動条件が成立したと判定することを特徴とする請求項2に記載の安全運転支援システム。
【請求項7】
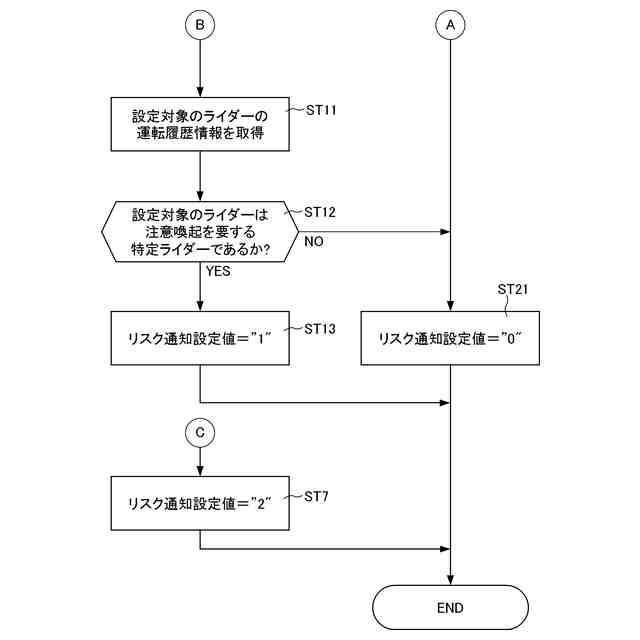
前記判定手段は、前記ライダーの過去の運転履歴の情報に基づいて、当該ライダーは前記特定交差点への進入時に注意喚起を必要とする特定ライダーであるか否かを判定するとともに、前記特定ライダーによって運転される前記支援対象が前記第3範囲内に進入した場合、前記第2通知作動条件が成立したと判定することを特徴とする請求項6に記載の安全運転支援システム。
【請求項8】
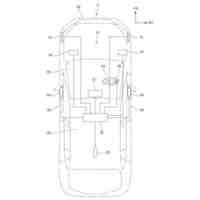
前記運転特性取得手段は、前記ライダーの頭部又は当該頭部を保護するヘルメットに装着された加速度センサ又は角加速度センサの検出値を前記頭部運動状態情報として取得することを特徴とする請求項1から7の何れかに記載の安全運転支援システム。
【請求項9】
前記支援対象は、前記第1範囲内に接触可能性のある移動体が存在することを条件として、制動装置及び操舵装置の少なくとも何れかを自動で操作する運転支援装置を備えることを特徴とする請求項1から7の何れかに記載の交通安全支援システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、交通安全支援システムに関する。より詳しくは、移動体である支援対象の運転者による運転を支援する交通安全支援システムに関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
公共交通では、四輪自動車、自動二輪車、及び自転車等の移動体や歩行者等、様々な交通参加者が各々の意思に基づき各々異なった速度で移動する。このような公共交通における交通参加者の安全性や利便性等を向上するための技術として、例えば特許文献1には、予測された危険状態と併せて、乗員が危険を感じたときの車両の走行状態の情報及び車両の周囲環境の情報に基づいて運転支援制御を実行することによって、複数の対象物が存在する場合であっても円滑な走行を妨げることなく警告又は走行制御への介入動作を実行する運転支援装置が示されている。
【先行技術文献】
【特許文献】
【0003】
特開2021-136001号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで比較的交通量が多い幹線道路と側道が交差する交差点では、側道側から交差点へ進入しようとする車両の運転者に対し、交差点内へ進入する前に幹線道路側を走行する車両の存在を目視によって確認する安全確認行動が求められる。また自動二輪車や鞍乗型三輪車両等の鞍乗型車両は四輪自動車よりも軽量であるため、鞍乗型車両のライダーに対しては、このような安全確認行動を適切に履行することが特に強く求められる。
【0005】
本発明は、鞍乗型車両のライダーに対し、交差点への進入時における安全確認行動を適切に履行させることができる安全運転支援システムを提供することを目的としたものであり、ひいては持続可能な輸送システムの発展に寄与することを目的とする。
【課題を解決するための手段】
【0006】
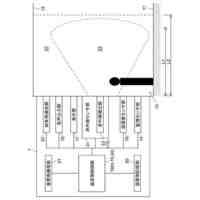
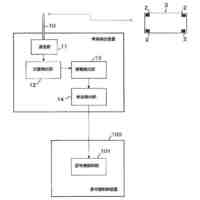
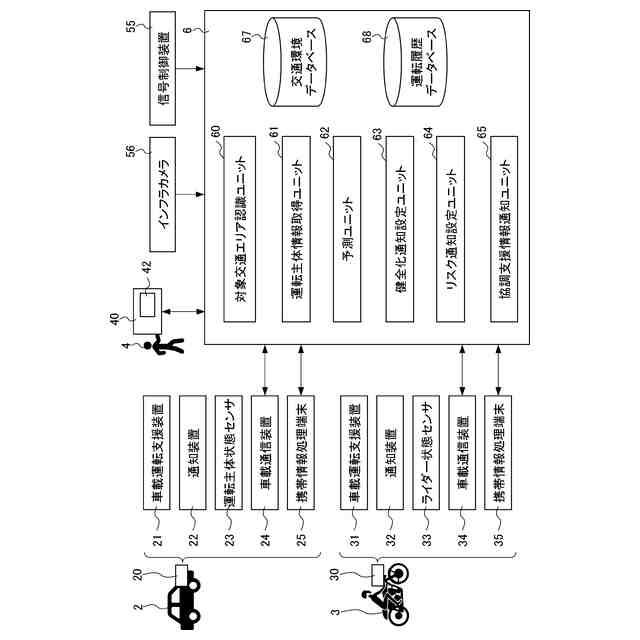
(1)本発明に係る交通安全支援システムは、鞍乗型車両(例えば、後述の自動二輪車3)である支援対象のライダーによる運転を支援するものであって、前記支援対象の周囲における交通参加者及び交通環境を認識する認識手段(例えば、後述の対象交通エリア認識ユニット60)と、前記ライダーが認知可能な態様で作動するマンマシンインターフェース(例えば、後述のHMI320)と、前記ライダーの頭部運動状態情報を取得する運転特性取得手段(例えば、後述のライダー状態センサ33及び運転主体情報取得ユニット61)と、前記認識手段によって前記支援対象又は前記支援対象の進行方向前方を中心とする第1範囲(例えば、後述のADAS作動範囲B1)外に他移動体(例えば、後述の他車両V)の存在が認識されている間、前記認識手段による認識結果及び前記頭部運動状態情報に基づいて第1通知作動条件(例えば、後述のアナログ通知作動条件)の成立の有無を判定する判定手段(例えば、後述のリスク通知設定ユニット64)と、前記判定手段によって前記第1通知作動条件が成立したと判定された場合、第1通知態様(例えば、後述のアナログ通知モード)で前記マンマシンインターフェースを作動させる通知制御手段(例えば、後述のHMI制御装置325)と、を備え、前記判定手段は、前記他移動体が移動する第1道路(例えば、後述の第1道路R1)と前記支援対象が移動する第2道路(例えば、後述の第2道路R2)とが各々の進行方向前方の特定交差点(例えば、後述の特定交差点P)において交差する場合であり、かつ前記支援対象が前記特定交差点を中心として定められかつ前記第1範囲を包含する第2範囲(例えば、後述のアナログ通知作動範囲B2)内に存在する間に、前記ライダーによる前記他移動体に対する確認行動が行われなかった場合、前記第1通知作動条件が成立したと判定することを特徴とする。
【0007】
(2)この場合、前記判定手段は、前記認識手段による認識結果及び前記頭部運動状態情報に基づいて、前記ライダーの頭部が前記進行方向前方から前記他移動体側へ向けられた確認回数及び前記頭部が前記他移動体側へ向けられた確認時間の少なくとも何れかを取得し、前記確認回数及び前記確認時間の少なくとも何れかに基づいて前記確認行動の有無を判定することが好ましい。
【0008】
(3)この場合、前記特定交差点には、信号機が設置されていないことが好ましい。
【0009】
(4)この場合、前記第2道路は、前記第1道路よりも道路幅が狭いことが好ましい。
【0010】
(5)この場合、前記第2道路は、前記第1道路よりも車線数が少ないことが好ましい。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
本田技研工業株式会社
スポット溶接方法
13日前
本田技研工業株式会社
回転電機用ロータ
今日
本田技研工業株式会社
金属シリコンの製造方法
今日
本田技研工業株式会社
情報処理方法及びプログラム
12日前
本田技研工業株式会社
制御装置、および、制御方法
13日前
本田技研工業株式会社
情報処理装置、情報処理方法、およびプログラム
12日前
本田技研工業株式会社
移動体の制御装置、移動体の制御方法、およびプログラム
7日前
本田技研工業株式会社
作動装置
12日前
本田技研工業株式会社
制御装置
14日前
本田技研工業株式会社
車両、制御方法、プログラム、記憶媒体、及び情報処理装置
12日前
本田技研工業株式会社
熱媒体組み合わせ最適化装置、熱媒体組み合わせ最適化方法、および、熱媒体組み合わせ最適化プログラム
今日
個人
安全支援装置
14日前
日本精機株式会社
警報システム
2か月前
個人
自動電動車椅子
2か月前
株式会社SUBARU
車両
1か月前
エムケー精工株式会社
車両誘導装置
2か月前
スズキ株式会社
運転支援装置
2か月前
ニッタン株式会社
発信機
3か月前
株式会社国際電気
防災システム
2か月前
個人
磁気路上での車両の路線離脱防御
1か月前
ニッタン株式会社
検知器
1か月前
ニッタン株式会社
検知器
2か月前
ニッタン株式会社
検知器
2か月前
ニッタン株式会社
検知器
2か月前
日本無線株式会社
船舶システム
15日前
トヨタ自動車株式会社
サーバ
1か月前
日本信号株式会社
異常走行検出装置
1か月前
トヨタ自動車株式会社
サーバ
23日前
大阪瓦斯株式会社
音声出力システム
1か月前
ダイハツ工業株式会社
移動支援装置
1か月前
株式会社小糸製作所
移動体検出装置
2か月前
株式会社SUBARU
運転支援装置
1か月前
株式会社デンソー
運航管理装置
1か月前
日本精機株式会社
報知装置及び報知システム
2か月前
株式会社小糸製作所
車両検出システム
2か月前
三菱自動車工業株式会社
制御システム
1か月前
続きを見る
他の特許を見る






 特許ウォッチ
特許ウォッチ