TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025154200
公報種別
公開特許公報(A)
公開日
2025-10-10
出願番号
2024057073
出願日
2024-03-29
発明の名称
吸着パッド
出願人
パナソニックIPマネジメント株式会社
代理人
弁理士法人栄光事務所
主分類
B25J
15/06 20060101AFI20251002BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】吸着対象のワークを吸着する際に吸着パッドのめくれを抑制できる吸着パッドを提供する。
【解決手段】ワーク17を吸着し、真空発生機に接続される吸着パッド11であって、スカート部59と、ワーク17に接し、スカート部59の内部に形成される複数のリブ61と、を備え、リブ61とワーク17とが接触する第1の接触点のうちに最も近い第1の接触点が、複数のリブ61とスカート部59とが接触する第2の接触点のうち、中心軸に近い第2の接触点を結ぶ線の中に位置する。
【選択図】図8A
特許請求の範囲
【請求項1】
ワークを吸着し、真空発生機に接続される吸着パッドであって、
スカート部と、
前記ワークに接し、前記スカート部の内部に形成される複数のリブと、
を備え、
前記リブと前記ワークとが接触する第1の接触点のうち前記吸着パッドの中心軸に最も近い第1の接触点が、前記複数のリブと前記スカート部とが接触する第2の接触点のうち、前記中心軸に近い第2の接触点を結ぶ線の中に位置する、
吸着パッド。
続きを表示(約 330 文字)
【請求項2】
前記リブは、前記リブの底辺部に切欠部を有し、
前記切欠部と前記中心軸との距離は、前記第2の接触点と前記中心軸との距離よりも長い、
請求項1に記載の吸着パッド。
【請求項3】
前記複数のリブは、前記中心軸を中心に放射状に配置され、前記中心軸の側が固定される、
請求項1又は2に記載の吸着パッド。
【請求項4】
前記複数のリブのそれぞれは、前記中心軸の側で他の前記リブと接続される、
請求項3に記載の吸着パッド。
【請求項5】
前記複数のリブのそれぞれは、前記中心軸の側に配置された所定の部材を介在させて繋げられる、
請求項3に記載の吸着パッド。
発明の詳細な説明
【技術分野】
【0001】
本発明は、吸着パッドに関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
従来、負圧流体の供給される通路を内部に有したボディの端部に固定され、ワークを吸着する吸着部の吸着面にリブを有した吸着パッドであって、リブはワーク側に向かって突出し、通路の外周側に形成され、径方向外側に向かって延在する複数の第1リブ部と、第1リブ部の外周側に形成され第1リブ部に対して周方向にオフセットして配置された複数の第2リブ部と、から構成され、隣接する第1リブ部の間には負圧流体の流通する供給路が形成され、第2リブ部の少なくとも一部が供給路の延在方向に臨むように配置される、吸着パッドが知られている(特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開2020-23022号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
本開示は、吸着対象のワークを吸着する際に吸着パッドのめくれを抑制できる吸着パッドを提供する。
【課題を解決するための手段】
【0005】
本開示の一態様は、ワークを吸着し、真空発生機に接続される吸着パッドであって、スカート部と、前記ワークに接し、前記スカート部の内部に形成される複数のリブと、を備え、前記リブと前記ワークとが接触する第1の接触点のうち前記吸着パッドの中心軸に最も近い第1の接触点が、前記リブと前記スカート部とが接触する第2の接触点のうち、前記中心軸に近い第2の接触点を結ぶ線の中に位置する、吸着パッドである。
【発明の効果】
【0006】
本開示によれば、吸着対象のワークを吸着する際に吸着パッドのめくれを抑制できる。
【図面の簡単な説明】
【0007】
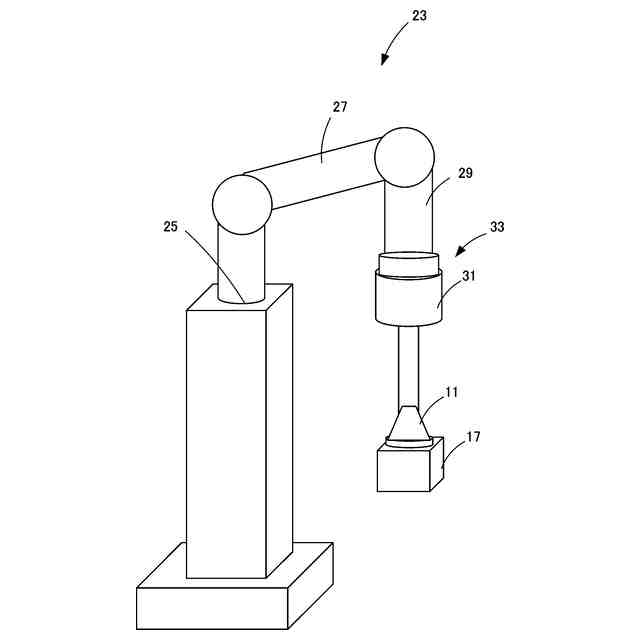
本開示の実施の形態1に係る吸着パッドを吸着ハンドに備えるロボット装置の外観斜視図
マニピュレータの斜視図
中心軸を含む面で切った吸着パッドの断面図
吸着パッドを吸着開口の方向(Z方向)から見た下面図
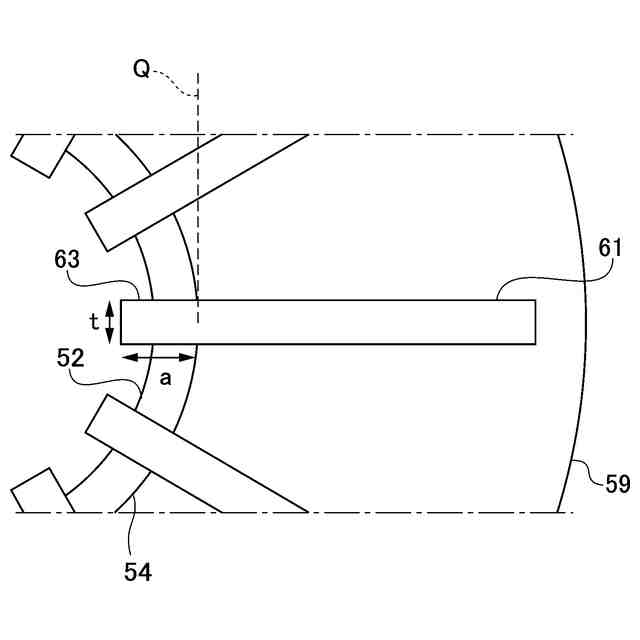
図4の要部拡大図
吸着パッドを中心軸と平行な面で切った斜視図
比較例に係る吸着パッドの要部拡大斜視図
中心軸を含む面で切った吸着パッドの中心軸を挟む片側の断面図
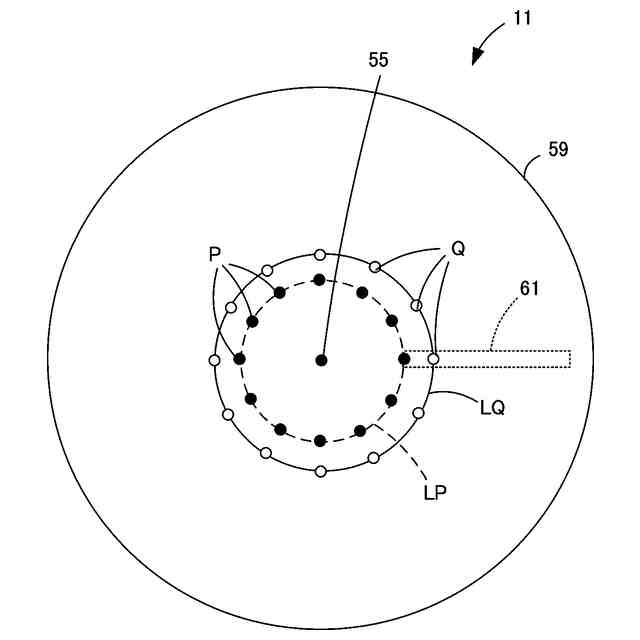
第1の接触点Pと第2の接触点Qとの位置関係の一例を示す図
リブに設けられる切欠部の好適な位置を表す説明図
リブのそれぞれが中心軸の側で他のリブと接続された吸着パッドの斜視図
リブのそれぞれが中心軸の側で所定の部材を介在させて繋げられた吸着パッドの斜視図
吸着パッドによるワークの吸着工程を表す動作説明図
比較例に係る吸着パッドにおいて生じるめくれの説明図
比較例に係る吸着パッドを簡略化しためくれ発生時の作用を説明する模式図
実施の形態1に係る吸着パッドを簡略化しためくれ発生時の作用を説明する模式図
切欠部を有しないリブを備えた吸着パッドのワーク吸着時の作用図
切欠部を有するリブを備えた吸着パッドのワーク吸着時の作用図
折れ曲がり防止部の設けられたリブの説明図
三角形状部の頂角部分を切り取ったリブの説明図
図19に示したリブから延出部を切り取ったリブの説明図
【発明を実施するための形態】
【0008】
以下、適宜図面を参照しながら、実施の形態を詳細に説明する。但し、必要以上に詳細な説明は省略する場合がある。例えば、既によく知られた事項の詳細説明や実質的に同一の構成に対する重複説明を省略する場合がある。これは、以下の説明が不必要に冗長になることを避け、当業者の理解を容易にするためである。なお、添付図面及び以下の説明は、当業者が本開示を十分に理解するために提供されるものであり、これらにより特許請求の範囲に記載の主題を限定することは意図されていない。
【0009】
(本開示の実施の形態を得るに至った経緯)
流通業界の多様な商品(物品)をロボットと吸着パッドでピッキングする技術が研究されている。通常、吸着パッドは、商品の包装形態ごとに用意されるが、商品は多様であるために、望ましくは1つで複数の商品特性を取り扱えるようにし、切り替え時間を短縮したい要請がある。しかし、例えば袋を吸着するためには、柔軟なスカート部とリブを含む袋用パッドが必要であるが、袋用パッドで缶箱のような硬いワークを吸着しようとすると、吸着パッドをワークに押し付ける力が加わる際、リブがワークと接触する点(特許文献1の第1リブ46における第1連通孔40側の端)を支点に回転のモーメントが発生し、スカート部がめくれ、吸着に失敗することがある。
【0010】
以下の実施の形態では、吸着対象のワークを吸着する際に吸着パッドのめくれを抑制して、ワークの吸着に成功し易くできる吸着パッドについて説明する。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
固定補助具
1か月前
個人
折りたたみ工具
1か月前
株式会社三協システム
製函機
1か月前
川崎重工業株式会社
ロボット
13日前
株式会社竹中工務店
補助セット
12日前
株式会社三協システム
移載装置
1か月前
CKD株式会社
把持装置
1か月前
株式会社不二越
ロボット
12日前
株式会社不二越
ロボット操作装置
1か月前
株式会社不二越
ロボットシステム
1か月前
川崎重工業株式会社
ハンド
4日前
SMC株式会社
着脱装置
1か月前
日本精工株式会社
締結用工具
1か月前
株式会社ミクロブ
把持装置
1か月前
太陽パーツ株式会社
アシストスーツ
1か月前
株式会社不二越
移動ロボットシステム
15日前
トヨタ自動車株式会社
ロボット
7日前
トヨタ自動車株式会社
カプラ接続治具
1か月前
ARMA株式会社
ジョイントフレーム
1か月前
工機ホールディングス株式会社
作業機
4日前
本田技研工業株式会社
装置
18日前
株式会社不二越
ロボットシステム
1か月前
川崎重工業株式会社
塗装システム
4日前
株式会社不二越
エッジ仕上げ装置
25日前
株式会社不二越
ロボットシステム
1か月前
株式会社不二越
垂直多関節ロボット
26日前
トヨタ自動車株式会社
軌道生成装置
7日前
トヨタ自動車株式会社
歩行ロボット
1か月前
シンフォニアテクノロジー株式会社
搬送装置
15日前
アネックスツール株式会社
ドライバービット
11日前
工機ホールディングス株式会社
作業機
4日前
ダイハツ工業株式会社
移載治具
1か月前
大和ハウス工業株式会社
ねじ回転工具
1か月前
ライオン株式会社
移載システム
27日前
川崎重工業株式会社
ワーク搬送ロボット
4日前
ワールド技研株式会社
ロボットセル装置
12日前
続きを見る
他の特許を見る







 特許ウォッチ
特許ウォッチ


































