TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025152650
公報種別
公開特許公報(A)
公開日
2025-10-10
出願番号
2024054652
出願日
2024-03-28
発明の名称
運転支援装置、運転支援方法および運転支援プログラム
出願人
株式会社デンソー
,
株式会社J-QuAD DYNAMICS
,
トヨタ自動車株式会社
代理人
弁理士法人ゆうあい特許事務所
主分類
G08G
1/16 20060101AFI20251002BHJP(信号)
要約
【課題】適切な運転支援を行う運転支援装置、運転支援方法および運転支援プログラムを提供する。
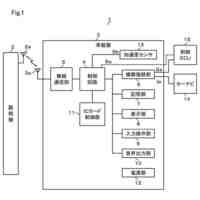
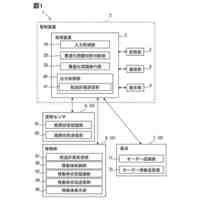
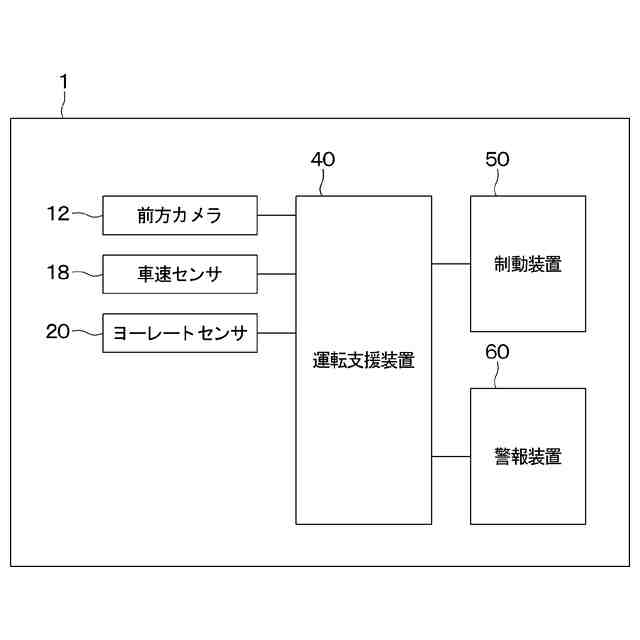
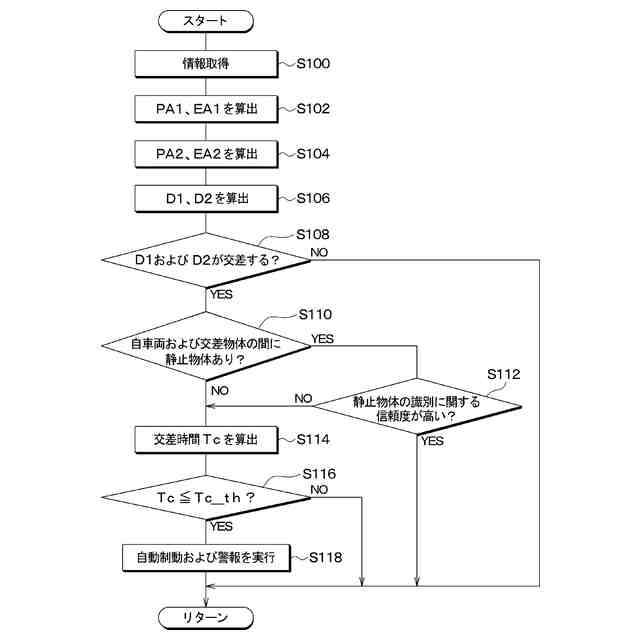
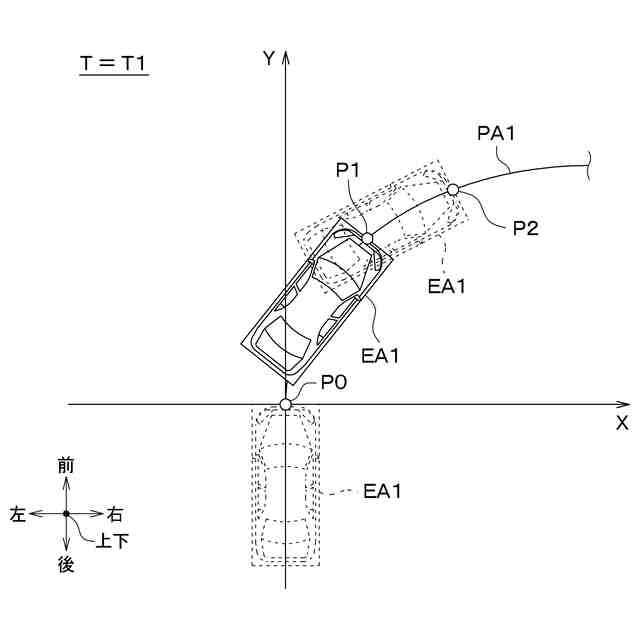
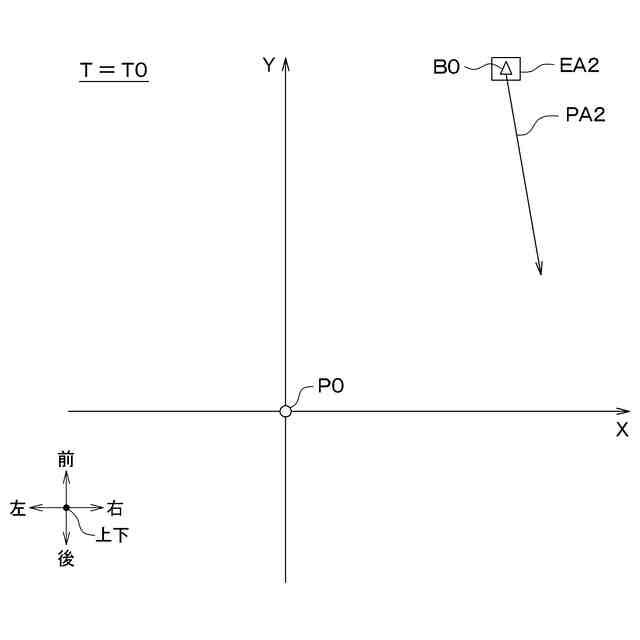
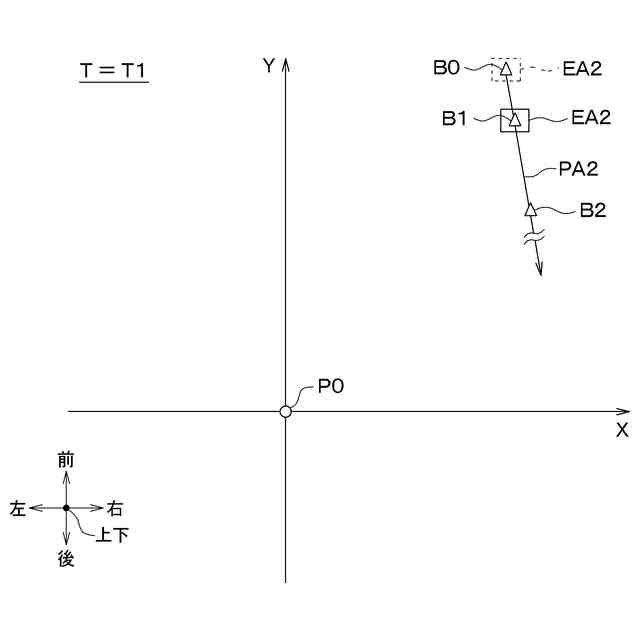
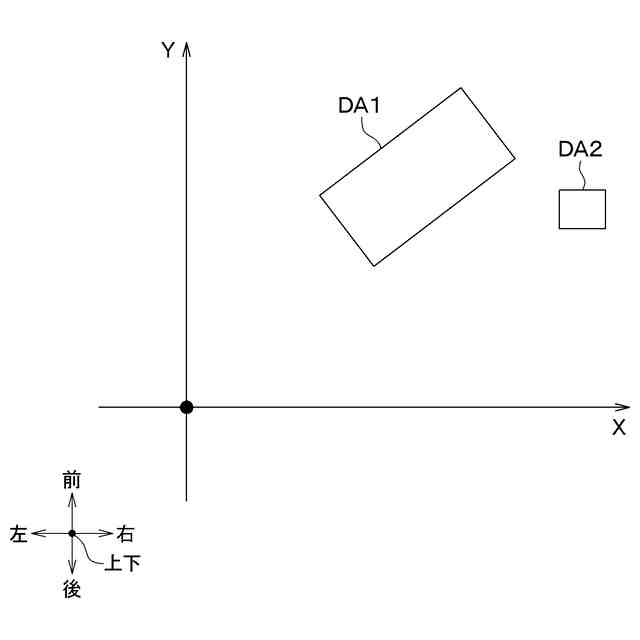
【解決手段】運転支援方法および運転支援プログラムの実行を行う運転支援装置40は、前方センサ12によって得られる情報および自車両に関する情報を取得し、自車両の左右方向における距離、自車両の前方向における距離および現在から経過した時間からなる3次元座標系における自車両が存在する領域の推移を示す立体である自車立体と、3次元座標系における物体が存在する領域の推移を示す立体である物体立体とが交差するか否かに基づいて、自車両の運転支援を行い、自車立体と物体立体とが交差するとき、かつ、物体立体が自車立体と交差する物体である交差物体および自車両の間に静止物体があるとき、自車両を制動させないで、自車立体と物体立体とが交差するとき、かつ、交差物体および自車両の間に静止物体がないとき、自車両を制動させる。
【選択図】図1
特許請求の範囲
【請求項1】
運転支援装置であって、
自車両(90)の前方の物体を検出する前方センサ(12)によって得られる情報および前記自車両に関する情報を取得する取得部(S100)と、
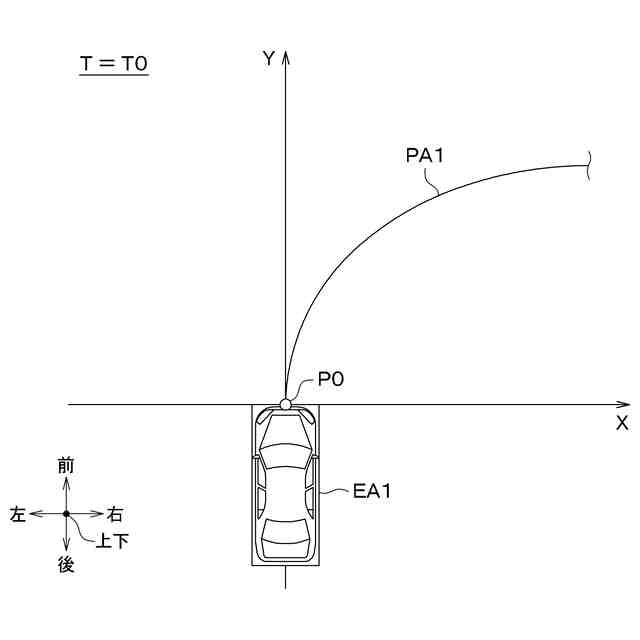
前記自車両の左右方向における距離、前記自車両の前方向における距離および現在から経過した時間からなる3次元座標系における前記自車両が存在する領域(EA1)の推移を示す立体である自車立体(D1)と、前記3次元座標系における前記物体が存在する領域(EA2)の推移を示す立体である物体立体(D2)とが交差するか否かに基づいて、前記自車両の運転支援を行う支援部(S108~S118)と、
を備え、
前記支援部は、
前記自車立体と前記物体立体とが交差するとき、かつ、前記物体立体が前記自車立体と交差する前記物体である交差物体(Vo)および前記自車両の間に静止物体(Os)があるとき、前記自車両を制動させないで、
前記自車立体と前記物体立体とが交差するとき、かつ、前記交差物体および前記自車両の間に前記静止物体がないとき、前記自車両を制動させる運転支援装置。
続きを表示(約 2,300 文字)
【請求項2】
前記支援部は、
前記自車立体と前記物体立体とが交差するとき、かつ、前記交差物体および前記自車両の間に前記静止物体があるとき、警報装置(60)を作動させないで、
前記自車立体と前記物体立体とが交差するとき、かつ、前記交差物体および前記自車両の間に前記静止物体がないとき、前記警報装置を作動させる請求項1に記載の運転支援装置。
【請求項3】
前記支援部は、
前記交差物体および前記自車両の間に前記静止物体があると判定して前記静止物体の識別に関する値が閾値以上であるとき、前記自車両を制動させないで、
前記交差物体および前記自車両の間に前記静止物体があると判定して前記静止物体の識別に関する値が前記閾値未満であるとき、前記自車両を制動させる請求項1または2に記載の運転支援装置。
【請求項4】
前記支援部は、
前記自車立体と前記物体立体とが交差するとき、かつ、前記交差物体および前記自車両の間に前記静止物体がないとき、かつ、前記自車立体および前記物体立体が交差するときの時間である交差時間(Tc)に関する値が交差時間閾値(Tc_th)よりも大きいとき、前記自車両を制動させないで、
前記自車立体と前記物体立体とが交差するとき、かつ、前記交差物体および前記自車両の間に前記静止物体がないとき、かつ、前記交差時間に関する値が前記交差時間閾値以下であるとき、前記自車両を制動させる請求項1または2に記載の運転支援装置。
【請求項5】
前記支援部は、
前記自車立体と前記物体立体とが交差するとき、かつ、前記交差物体および前記自車両の間に前記静止物体があるとき、かつ、前記自車両の速度ベクトルと前記交差物体の速度ベクトルとでなす角度である交差角度が第1閾値以上、第2閾値以下であるとき、前記自車両を制動させないで、
前記自車立体と前記物体立体とが交差するとき、かつ、前記交差角度が前記第1閾値未満であるとき、前記自車両を制動させ、
前記自車立体と前記物体立体とが交差するとき、かつ、前記交差角度が前記第2閾値よりも大きいとき、前記自車両を制動させる請求項1または2に記載の運転支援装置。
【請求項6】
前記支援部は、
前記自車立体と前記物体立体とが交差するとき、かつ、前記交差物体および前記自車両の間に前記静止物体があるとき、かつ、前記自車両の操舵角が操舵角閾値以上であるとき、かつ、前記操舵角の変化量が変化量閾値以上であるとき、かつ、前記自車両の旋回半径が旋回半径閾値以下であるとき、前記自車両を制動させないで、
前記自車立体と前記物体立体とが交差するとき、かつ、前記操舵角が前記操舵角閾値未満であるとき、前記自車両を制動させ、
前記自車立体と前記物体立体とが交差するとき、かつ、前記変化量が前記変化量閾値未満であるとき、前記自車両を制動させ、
前記自車立体と前記物体立体とが交差するとき、かつ、前記旋回半径が前記旋回半径閾値よりも大きいとき、前記自車両を制動させる請求項1または2に記載の運転支援装置。
【請求項7】
運転支援方法であって、
自車両(90)の前方の物体を検出する前方センサ(12)によって得られる情報および前記自車両に関する情報を取得することと、
前記自車両の左右方向における距離、前記自車両の前方向における距離および現在から経過した時間からなる3次元座標系における前記自車両が存在する領域(EA1)の推移を示す立体である自車立体(D1)と、前記3次元座標系における前記物体が存在する領域(EA2)の推移を示す立体である物体立体(D2)とが交差するか否かに基づいて、前記自車両の運転支援を行うことと、
を含み、
前記自車立体と前記物体立体とが交差するとき、かつ、前記物体立体が前記自車立体と交差する前記物体である交差物体(Vo)および前記自車両の間に静止物体(Os)があるとき、前記自車両を制動させないで、
前記自車立体と前記物体立体とが交差するとき、かつ、前記交差物体および前記自車両の間に前記静止物体がないとき、前記自車両を制動させる運転支援方法。
【請求項8】
運転支援プログラムであって、
運転支援装置を、
自車両(90)の前方の物体を検出する前方センサ(12)によって得られる情報および前記自車両に関する情報を取得する取得部(S100)、
前記自車両の左右方向における距離、前記自車両の前方向における距離および現在から経過した時間からなる3次元座標系における前記自車両が存在する領域(EA1)の推移を示す立体である自車立体(D1)と、前記3次元座標系における前記物体が存在する領域(EA2)の推移を示す立体である物体立体(D2)とが交差するか否かに基づいて、前記自車両の運転支援を行う支援部(S108~S118)、
として機能させ、
前記支援部は、
前記自車立体と前記物体立体とが交差するとき、かつ、前記物体立体が前記自車立体と交差する前記物体である交差物体(Vo)および前記自車両の間に静止物体(Os)があるとき、前記自車両を制動させないで、
前記自車立体と前記物体立体とが交差するとき、かつ、前記交差物体および前記自車両の間に前記静止物体がないとき、前記自車両を制動させる運転支援プログラム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、運転支援装置、運転支援方法および運転支援プログラムに関するものである。
続きを表示(約 2,400 文字)
【背景技術】
【0002】
従来、特許文献1に記載されているように、物体検出装置により検出された自車周囲に位置する物体と、自車との衝突の有無を判定する衝突判定装置が知られている。この衝突判定装置は、自車領域算出部と、自車情報算出部と、移動経路算出部と、判定部と、を備える。自車領域算出部は、現在の自車における自車進行方向での距離および車幅方向での距離で規定される2次元座標系において、自車の推定経路上での所定時間毎の自車存在領域を算出する。自車情報算出部は、自車進行方向での距離、車幅方向での距離および現在からの経過時間により規定される3次元座標系において、算出された所定時間毎の自車存在領域を補完することにより、自車存在領域の推移を示す立体である自車立体を算出する。移動経路算出部は、物体検出装置により検出された物体の位置に基づいて、3次元座標系における物体の移動経路を算出する。判定部は、算出された自車立体と、算出された物体の移動経路との交わりの有無に基づいて、自車に対する物体の衝突の有無を判定する。
【先行技術文献】
【特許文献】
【0003】
特開2020-8288号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ここで、例えば、移動物体が対向車であって、ポール、白線、縁石、ガードレールおよび分離帯等の静止物体を中央に有する道路を、自車が走行しているとする。この場合に、自車が車線変更すると、特許文献1に記載された衝突判定装置では、静止物体の先にいる対向車の移動経路と、自車立体とが交わることから、自車に対する対向車の衝突が有ると誤判定されることがある。自車に対する対向車の衝突が有ると誤判定されると、自車は、車線変更したいだけであるにもかかわらず、自動制動等される。したがって、特許文献1に記載された衝突判定装置では、自車と移動物体についてのみ考慮されているため、適切な運転支援ができない場合がある。
【0005】
本開示は、適切な運転支援を行う運転支援装置、運転支援方法および運転支援プログラムを提供することを目的とする。
【課題を解決するための手段】
【0006】
請求項1に記載の発明は、運転支援装置であって、自車両(90)の前方の物体を検出する前方センサ(12)によって得られる情報および自車両に関する情報を取得する取得部(S100)と、自車両の左右方向における距離、自車両の前方向における距離および現在から経過した時間からなる3次元座標系における自車両が存在する領域(EA1)の推移を示す立体である自車立体(D1)と、3次元座標系における物体が存在する領域(EA2)の推移を示す立体である物体立体(D2)とが交差するか否かに基づいて、自車両の運転支援を行う支援部(S108~S118)と、を備え、支援部は、自車立体と物体立体とが交差するとき、かつ、物体立体が自車立体と交差する物体である交差物体(Vo)および自車両の間に静止物体(Os)があるとき、自車両を制動させないで、自車立体と物体立体とが交差するとき、かつ、交差物体および自車両の間に静止物体がないとき、自車両を制動させる運転支援装置である。
【0007】
また、請求項7に記載の発明は、運転支援方法であって、自車両(90)の前方の物体を検出する前方センサ(12)によって得られる情報および自車両に関する情報を取得することと、自車両の左右方向における距離、自車両の前方向における距離および現在から経過した時間からなる3次元座標系における自車両が存在する領域(EA1)の推移を示す立体である自車立体(D1)と、3次元座標系における物体が存在する領域(EA2)の推移を示す立体である物体立体(D2)とが交差するか否かに基づいて、自車両の運転支援を行うことと、を含み、自車立体と物体立体とが交差するとき、かつ、物体立体が自車立体と交差する物体である交差物体(Vo)および自車両の間に静止物体(Os)があるとき、自車両を制動させないで、自車立体と物体立体とが交差するとき、かつ、交差物体および自車両の間に静止物体がないとき、自車両を制動させる運転支援方法である。
【0008】
さらに、請求項8に記載の発明は、運転支援プログラムであって、運転支援装置を、自車両(90)の前方の物体を検出する前方センサ(12)によって得られる情報および自車両に関する情報を取得する取得部(S100)、自車両の左右方向における距離、自車両の前方向における距離および現在から経過した時間からなる3次元座標系における自車両が存在する領域(EA1)の推移を示す立体である自車立体(D1)と、3次元座標系における物体が存在する領域(EA2)の推移を示す立体である物体立体(D2)とが交差するか否かに基づいて、自車両の運転支援を行う支援部(S108~S118)、として機能させ、支援部は、自車立体と物体立体とが交差するとき、かつ、物体立体が自車立体と交差する物体である交差物体(Vo)および自車両の間に静止物体(Os)があるとき、自車両を制動させないで、自車立体と物体立体とが交差するとき、かつ、交差物体および自車両の間に静止物体がないとき、自車両を制動させる運転支援プログラムである。
【0009】
これにより、適切な運転支援が行われる。
【0010】
なお、各構成要素等に付された括弧付きの参照符号は、その構成要素等と後述する実施形態に記載の具体的な構成要素等との対応関係の一例を示すものである。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社デンソー
車載器
11日前
株式会社デンソー
ステータ
11日前
株式会社デンソーエレクトロニクス
発音装置
15日前
株式会社デンソー
反力装置
5日前
株式会社デンソー
電子装置
6日前
株式会社デンソー
ねじ部材
11日前
株式会社デンソー
電子装置
15日前
株式会社デンソー
電子装置
5日前
株式会社デンソー
ステータ
11日前
株式会社デンソー
レーダ装置
4日前
株式会社デンソー
半導体装置
11日前
株式会社デンソーテン
インバータ
5日前
株式会社デンソー
農業用装置
7日前
株式会社デンソー
レーダ装置
15日前
株式会社デンソーエアクール
換気空調装置
12日前
株式会社デンソーテン
車載映像装置
11日前
株式会社デンソー
電子制御装置
11日前
株式会社デンソー
電気化学セル
15日前
株式会社デンソー
制御システム
18日前
株式会社デンソー
ステータコア
18日前
株式会社デンソー
電力変換装置
7日前
株式会社デンソー
フィルタ回路
19日前
株式会社デンソー
衝突予測装置
6日前
株式会社デンソー
運転支援装置
6日前
株式会社デンソー
電力変換装置
19日前
株式会社デンソー
電圧検出回路
7日前
株式会社デンソー
電力変換装置
11日前
株式会社デンソー
衝突予測装置
6日前
株式会社デンソー
電波吸収装置
15日前
株式会社デンソー
車載システム
5日前
株式会社デンソー
車載システム
5日前
株式会社デンソー
車両制御装置
5日前
株式会社デンソー
電子制御装置
15日前
株式会社デンソー
通信システム
15日前
株式会社デンソー
運航管理装置
4日前
株式会社デンソー
移動体制御装置
12日前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ