TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025152421
公報種別
公開特許公報(A)
公開日
2025-10-09
出願番号
2024054312
出願日
2024-03-28
発明の名称
モータコントローラ、モータコントロールプログラム及びモータシステム
出願人
ローム株式会社
代理人
弁理士法人 佐野特許事務所
主分類
H02P
6/182 20160101AFI20251002BHJP(電力の発電,変換,配電)
要約
【課題】簡単な構成を追加することでベクトル制御におけるモータの脱調を検出する。
【解決手段】モータコントローラ(300)は、モータ(200)をベクトル制御するように構成された制御回路(400)と、制御回路(400)からの出力に基づきモータ(200)に印加電圧(Vm)を供給するように構成されたドライバ(500)と、を有する。制御回路(400)は、印加電圧(Vm)と、演算により求められたモータ(200)の誘起電圧(VB)と、を比較し、誘起電圧(VB)が印加電圧(Vm)よりも大きい場合、モータ(200)が脱調状態であると判定する。
【選択図】図1
特許請求の範囲
【請求項1】
モータをベクトル制御するように構成された制御回路と、
前記制御回路からの出力に基づき前記モータに印加電圧を供給するように構成されたドライバ回路と、を有し、
前記制御回路は、前記印加電圧と、演算により求められた前記モータの誘起電圧と、を比較し、前記誘起電圧が前記印加電圧よりも大きい場合、前記モータが脱調状態であると判定する構成されたモータコントローラ。
続きを表示(約 450 文字)
【請求項2】
前記制御回路は、前記誘起電圧が前記印加電圧よりも大きい場合において、前記誘起電圧と前記印加電圧との差が閾値よりも大きいときに前記モータが脱調状態であると判定するように構成された請求項1に記載のモータコントローラ。
【請求項3】
請求項1又は請求項2に記載のモータコントローラと、
前記モータと、を有するように構成されたモータシステム。
【請求項4】
モータをベクトル制御するモータコントロールプログラムにおいて、印加電圧と、演算により求められた前記モータの誘起電圧と、を比較し、前記誘起電圧が前記印加電圧よりも大きい場合、前記モータが脱調状態であると判定するように構成されたモータコントロールプログラム。
【請求項5】
前記誘起電圧が前記印加電圧よりも大きい場合において、前記誘起電圧と前記印加電圧との差が閾値よりも大きいときに前記モータが脱調状態であると判定するように構成された請求項4に記載のモータコントロールプログラム。
発明の詳細な説明
【技術分野】
【0001】
本明細書中に開示されている発明は、モータコントローラ、モータコントロールプログラム及びモータシステムに関する。
続きを表示(約 1,200 文字)
【背景技術】
【0002】
永久磁石同期モータなど、ブラシによる転流機構を有しないモータでは、ロータの位置に応じて、コイルに供給する電流の向きを切り替える必要がある。永久磁石同期モータの駆動方式として、ホールセンサ等の位置センサから得られるロータの位置情報を利用する方式が知られている(特許文献1)。
【先行技術文献】
【特許文献】
【0003】
特開2020-58119号公報
【0004】
[概要]
モータの駆動方式としてホールセンサ等の位置センサを用いない位置センサレス方式の要求が高まっているが、センサレス方式において、別途センサ等を用いることなく、モータの異常駆動状態を検出する要求も高まっている。
【0005】
本明細書中に開示されているモータコントローラは、モータをベクトル制御するように構成された制御回路と、前記制御回路からの出力に基づき前記モータに印加電圧を供給するように構成されたドライバ回路と、を有する。前記制御回路は、前記印加電圧と、演算により求められた前記モータの誘起電圧と、を比較し、前記誘起電圧が前記印加電圧よりも大きい場合、前記モータが脱調状態であると判定するように構成される。
【図面の簡単な説明】
【0006】
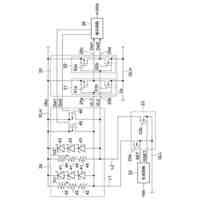
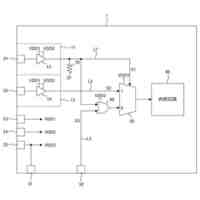
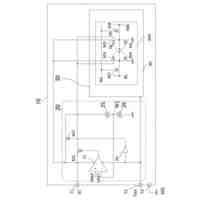
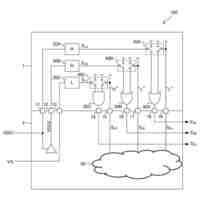
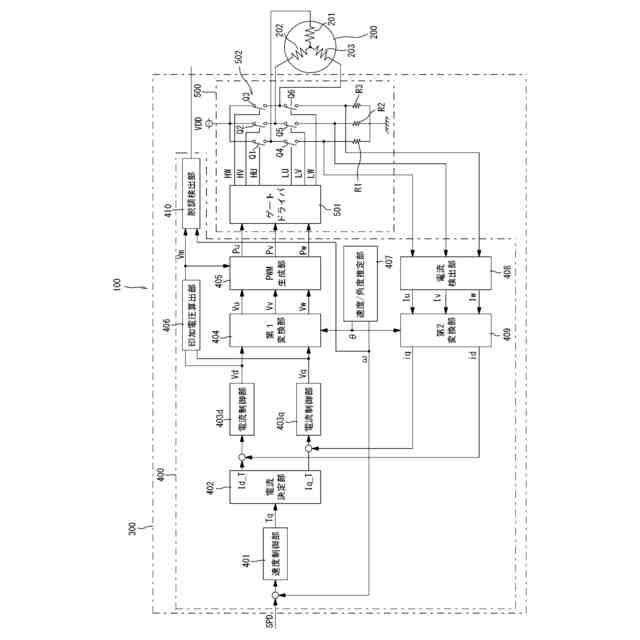
図1は、モータシステムの概略構成図である。
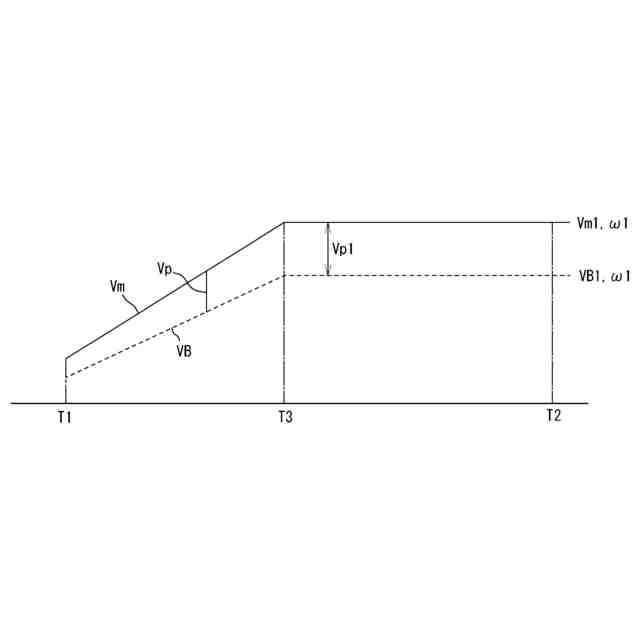
図2は、モータの駆動状態における印加電圧と誘起電圧と示すタイミングチャートである。
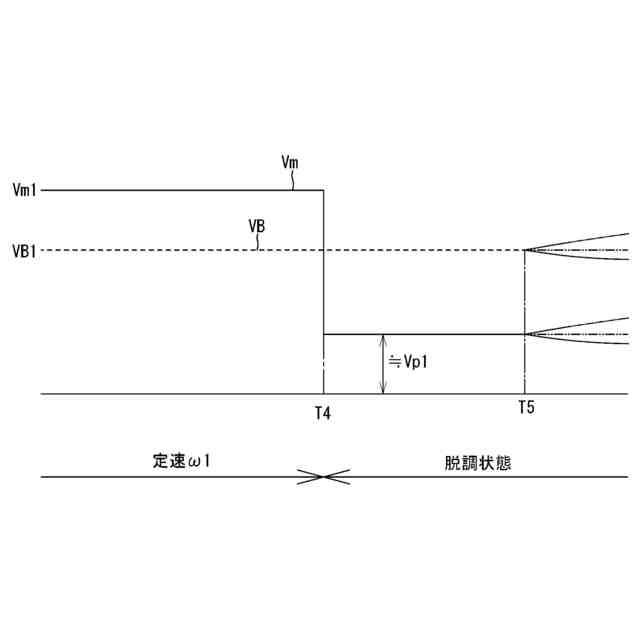
図3は、モータが通常状態から脱調状態に変化したときの印加電圧と誘起電圧と示すタイミングチャートである。
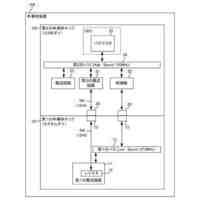
図4は、モータシステムにおける脱調検出動作を示すフローチャートである。
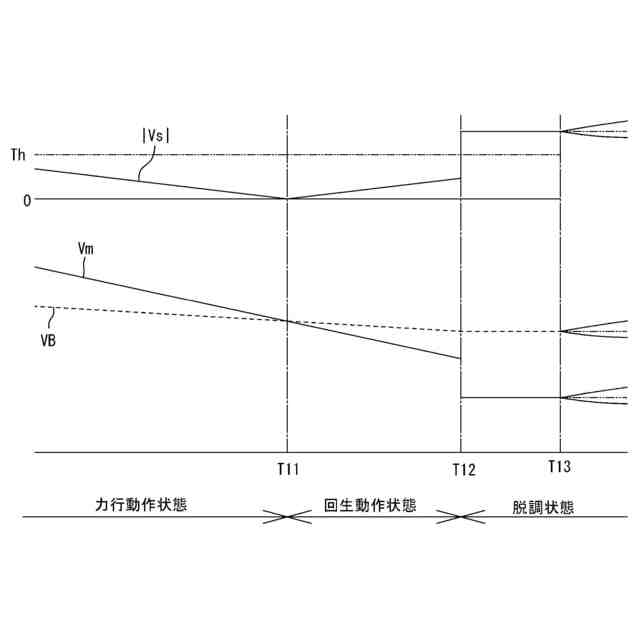
図5は、変形例のモータコントローラの動作を示すタイミングチャートである。
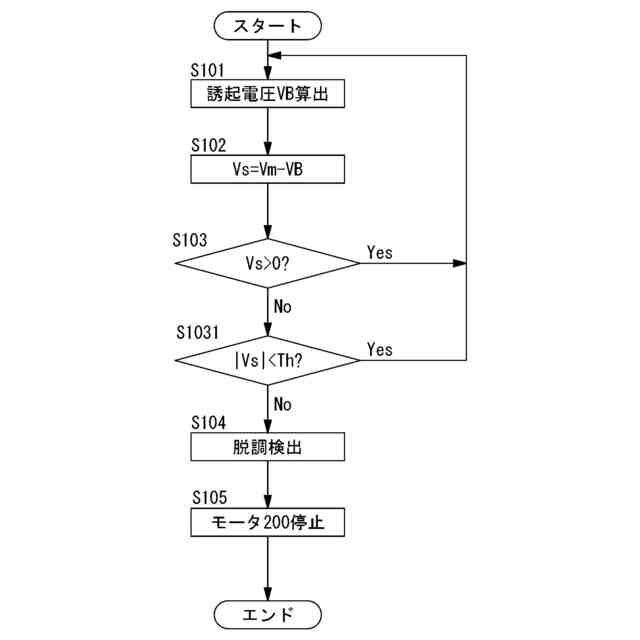
図6は、変形例のモータコントローラの脱調検出動作を示すフローチャートである。
【0007】
[詳細な説明]
【0008】
以下に図面を参照して実施形態を説明する。なお、本明細書において、「接続する」は、「電気的に接続する」場合を含むものである。
【0009】
<モータシステム100>
図1は、モータシステム100の概略構成図である。図1に示すモータシステム100は、モータ200と、モータコントローラ300と、を有する。
【0010】
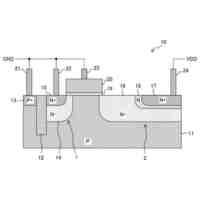
<モータ200>
モータ200は、永久磁石同期モータである。モータ200は、U相コイル201、V相コイル202、W相コイル203を有する。U相コイル201、V相コイル202、W相コイル203に適切なタイミング、大きさの電圧を印加し電流を流すことでモータ200は、所望の回転速度で回転する。モータ200は、ロータ(不図示)の回転速度及び回転角度を検出するホールセンサ等の位置センサを持たない位置センサレス方式のモータである。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
ローム株式会社
RAM
3日前
ローム株式会社
RAM
3日前
ローム株式会社
駆動回路
5日前
ローム株式会社
電源装置
3日前
ローム株式会社
発振回路
3日前
ローム株式会社
半導体装置
6日前
ローム株式会社
暗号化装置
4日前
ローム株式会社
半導体装置
10日前
ローム株式会社
半導体装置
10日前
ローム株式会社
半導体装置
10日前
ローム株式会社
メモリ装置
10日前
ローム株式会社
半導体装置
3日前
ローム株式会社
半導体装置
4日前
ローム株式会社
半導体装置
3日前
ローム株式会社
半導体装置
5日前
ローム株式会社
半導体装置
3日前
ローム株式会社
半導体装置
12日前
ローム株式会社
テスト回路
4日前
ローム株式会社
半導体装置
10日前
ローム株式会社
半導体装置
10日前
ローム株式会社
半導体装置
4日前
ローム株式会社
半導体装置
5日前
ローム株式会社
半導体装置
12日前
ローム株式会社
半導体装置
4日前
ローム株式会社
半導体装置
5日前
ローム株式会社
半導体装置
3日前
ローム株式会社
半導体装置
12日前
ローム株式会社
半導体装置
3日前
ローム株式会社
半導体装置
4日前
ローム株式会社
無線通信装置
4日前
ローム株式会社
時間測定回路
5日前
ローム株式会社
無線通信回路
5日前
ローム株式会社
信号出力回路
10日前
ローム株式会社
静電気保護素子
3日前
ローム株式会社
フォトダイオード
5日前
ローム株式会社
異常検知システム
3日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ