TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025151756
公報種別
公開特許公報(A)
公開日
2025-10-09
出願番号
2024053330
出願日
2024-03-28
発明の名称
姿勢推定システム
出願人
株式会社SUBARU
代理人
弁理士法人つばさ国際特許事務所
主分類
G01C
21/16 20060101AFI20251002BHJP(測定;試験)
要約
【課題】慣性センサの姿勢を簡易に推定することが可能な、姿勢推定システムを提供する。
【解決手段】本開示の一実施の形態に係る姿勢推定システムは、移動体の内部に設置されていると共に、加速度および角速度のうちの少なくとも一方に対応するパラメータを第1座標系にて取得し、第1パラメータデータとして出力する慣性センサと、この慣性センサから出力される第1座標系の第1パラメータデータに基づいて、移動体の座標系である第2座標系におけるパラメータの推定を行い、第2パラメータデータとして出力する第1演算部と、この第1演算部におけるパラメータの推定の際に用いられた、第1パラメータデータから第2パラメータデータへの変換行列を利用して、慣性センサの姿勢を推定する第2演算部と、この第2演算部による慣性センサの姿勢の推定結果に基づいて、所定の通知を行う通知部と、を備えている。
【選択図】図2
特許請求の範囲
【請求項1】
移動体の内部に設置されていると共に、加速度および角速度のうちの少なくとも一方に対応するパラメータを第1座標系にて取得し、第1パラメータデータとして出力する慣性センサと、
前記慣性センサから出力される前記第1座標系の前記第1パラメータデータに基づいて、前記移動体の座標系である第2座標系における前記パラメータの推定を行い、第2パラメータデータとして出力する第1演算部と、
前記第1演算部における前記パラメータの推定の際に用いられた、前記第1パラメータデータから前記第2パラメータデータへの変換行列を利用して、前記慣性センサの姿勢を推定する第2演算部と、
前記第2演算部による前記慣性センサの姿勢の推定結果に基づいて、所定の通知を行う通知部と
を備えた姿勢推定システム。
続きを表示(約 630 文字)
【請求項2】
前記通知部は、
前記慣性センサの姿勢推定値と所定の姿勢基準値との差異が、所定の閾値以上である場合に、
前記所定の通知を実行する
請求項1に記載の姿勢推定システム。
【請求項3】
前記差異は、前記第2座標系に対する前記第1座標系の傾きに対応する値である
請求項2に記載の姿勢推定システム。
【請求項4】
前記所定の通知が、前記移動体の運転診断に関する内容を含んでいる
請求項1ないし請求項3のいずれか1項に記載の姿勢推定システム。
【請求項5】
前記慣性センサの姿勢の推定結果を利用して、他のセンサにより取得された他のパラメータデータに対する補正処理を行う、第3演算部を更に備えた
請求項1ないし請求項3のいずれか1項に記載の姿勢推定システム。
【請求項6】
前記第1演算部は、前記第1パラメータデータに基づいて、前記第2座標系における複数の座標軸間の相関が最小となるように演算処理を行うことにより、前記第2パラメータデータを生成する
請求項1ないし請求項3のいずれか1項に記載の姿勢推定システム。
【請求項7】
前記慣性センサ、前記第1演算部および前記第2演算部がそれぞれ、前記移動体の内部に設置された電子機器に内蔵されている
請求項1ないし請求項3のいずれか1項に記載の姿勢推定システム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、慣性センサの姿勢を推定する姿勢推定システムに関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
移動体(各種の車両や航空機など)の内部に設置された慣性センサの姿勢を推定するシステムとして、各種の技術が開示されている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開2020-86491号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
このような姿勢推定システムでは、例えば、慣性センサの姿勢を簡易に推定することが求められている。慣性センサの姿勢を簡易に推定することが可能な、姿勢推定システムを提供することが望ましい。
【課題を解決するための手段】
【0005】
本開示の一実施の形態に係る姿勢推定システムは、移動体の内部に設置されていると共に、加速度および角速度のうちの少なくとも一方に対応するパラメータを第1座標系にて取得し、第1パラメータデータとして出力する慣性センサと、この慣性センサから出力される第1座標系の第1パラメータデータに基づいて、移動体の座標系である第2座標系におけるパラメータの推定を行い、第2パラメータデータとして出力する第1演算部と、この第1演算部におけるパラメータの推定の際に用いられた、第1パラメータデータから第2パラメータデータへの変換行列を利用して、慣性センサの姿勢を推定する第2演算部と、この第2演算部による慣性センサの姿勢の推定結果に基づいて、所定の通知を行う通知部と、を備えたものである。
【図面の簡単な説明】
【0006】
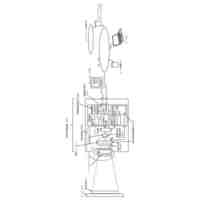
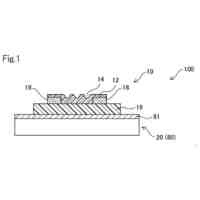
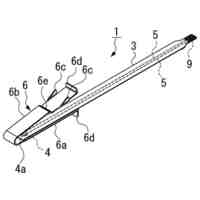
図1は、本開示の一実施の形態に係る各種のシステムが適用される車両の概略構成例を表す模式図である。
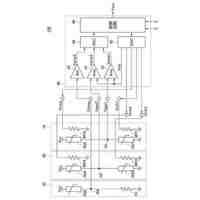
図2は、図1に示した車両および電子機器の詳細構成例を表すブロック図である。
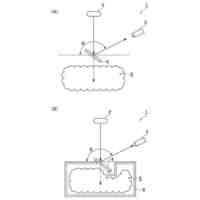
図3は、図1に示した電子機器における座標系の一例を表す模式図である。
図4は、図1に示した車両における座標系の一例を表す模式図である。
図5は、実施の形態に係る各種の処理例を表す流れ図である。
図6は、図5中に示したパラメータの推定処理の詳細例を表す流れ図である。
【発明を実施するための形態】
【0007】
以下、本開示の実施の形態について、図面を参照して詳細に説明する。なお、説明は以下の順序で行う。
1.実施の形態(車両の内部に設置された電子機器に演算部が内蔵されている場合の例)
2.変形例
【0008】
<1.実施の形態>
[構成]
図1は、本開示の一実施の形態に係る各種のシステム(後述する慣性センサの姿勢を推定する姿勢推定システム等)が適用される車両1の概略構成例を、模式的に表したものである。図2は、図1に示した車両1および電子機器(後述する電子機器8)の詳細構成例を、ブロック図で表したものである。
【0009】
また、図3は、電子機器8における座標系の一例(後述するxyz座標系)を模式的に表したものであり、図4は、車両1における座標系の一例(後述するXYZ座標系)を模式的に表したものである。
【0010】
この車両1は、図1,図2に示したように、車両制御部11、バッテリ12および通信器13を備えている。また、図1に示したように、この車両1の内部には、電子機器8が所定の姿勢状態にて設置されている。この電子機器8は、例えば、車両1のユーザ9(運転者を含む乗員など)が保有しているか、あるいは貸与されている機器であり、例えばスマートフォンやタブレット等により構成されている。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
メジャー文具
1か月前
日本精機株式会社
検出装置
1日前
個人
採尿及び採便具
7日前
個人
高精度同時多点測定装置
22日前
個人
アクセサリー型テスター
23日前
甲神電機株式会社
電流検出装置
1日前
株式会社ミツトヨ
測定器
13日前
ユニパルス株式会社
ロードセル
29日前
アズビル株式会社
電磁流量計
16日前
ダイキン工業株式会社
監視装置
27日前
株式会社ヨコオ
ソケット
29日前
株式会社ヨコオ
ソケット
28日前
株式会社チノー
放射光測温装置
29日前
トヨタ自動車株式会社
監視装置
28日前
大和製衡株式会社
組合せ計量装置
10日前
愛知時計電機株式会社
ガスメータ
13日前
長崎県
形状計測方法
23日前
ローム株式会社
半導体装置
21日前
大和製衡株式会社
組合せ計量装置
10日前
TDK株式会社
ガスセンサ
1か月前
TDK株式会社
磁気センサ
28日前
ローム株式会社
半導体装置
21日前
愛知電機株式会社
軸部材の外観検査装置
10日前
個人
システム、装置及び実験方法
16日前
双庸電子株式会社
誤配線検査装置
2日前
TDK株式会社
ガスセンサ
29日前
日本特殊陶業株式会社
センサ
27日前
日東精工株式会社
振動波形検査装置
2日前
日本特殊陶業株式会社
センサ
13日前
日本特殊陶業株式会社
センサ
27日前
三菱マテリアル株式会社
温度センサ
1か月前
中国電力株式会社
電柱管理システム
27日前
日本特殊陶業株式会社
センサ
27日前
日本特殊陶業株式会社
センサ
27日前
日本特殊陶業株式会社
センサ
27日前
多摩川精機株式会社
冗長エンコーダ
28日前
続きを見る
他の特許を見る










 特許ウォッチ
特許ウォッチ