TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025151434
公報種別
公開特許公報(A)
公開日
2025-10-09
出願番号
2024052861
出願日
2024-03-28
発明の名称
経路推定装置および衝突判定装置
出願人
株式会社デンソー
,
トヨタ自動車株式会社
,
株式会社J-QuAD DYNAMICS
代理人
弁理士法人明成国際特許事務所
主分類
B60W
40/10 20120101AFI20251002BHJP(車両一般)
要約
【課題】四輪操舵車両の走行経路の推定精度の低下を抑制する。
【解決手段】四輪操舵車両として構成された車両VMの走行経路PA1を推定する経路推定装置210であって、車両が有する後輪の操舵角に関する情報である後輪操舵情報を取得する取得部212と、後輪操舵情報を利用して特定された後輪の操舵角の時間変化率を利用して、走行経路を推定する自車経路推定部213と、を備える。
【選択図】図1
特許請求の範囲
【請求項1】
四輪操舵車両として構成された車両(VM)の走行経路(PA1)を推定する経路推定装置(210)であって、
前記車両が有する後輪の操舵角に関する情報である後輪操舵情報を取得する取得部(212)と、
前記後輪操舵情報を利用して特定された前記後輪の操舵角の時間変化率を利用して、前記走行経路を推定する自車経路推定部(213)と、
を備える、
経路推定装置。
続きを表示(約 730 文字)
【請求項2】
請求項1に記載の経路推定装置であって、
前記自車経路推定部は、
前記車両に備えられているセンサ(120)による検出値を利用して特定されたヨーレートを、前記後輪の操舵角の時間変化率により補正した補正ヨーレートを算出することと、
前記補正ヨーレートを利用して前記走行経路を推定することと、
を実行する、
経路推定装置。
【請求項3】
請求項1に記載の経路推定装置であって、
前記取得部は、前記後輪操舵情報として、前記操舵角を指示する制御信号を取得する、
経路推定装置。
【請求項4】
物標検出装置(110)により検出された前記車両の周囲に位置する物標(TG)と、前記車両との衝突の有無を判定する衝突判定装置(200)であって、
請求項1から請求項3のいずれか一項に記載の経路推定装置と、
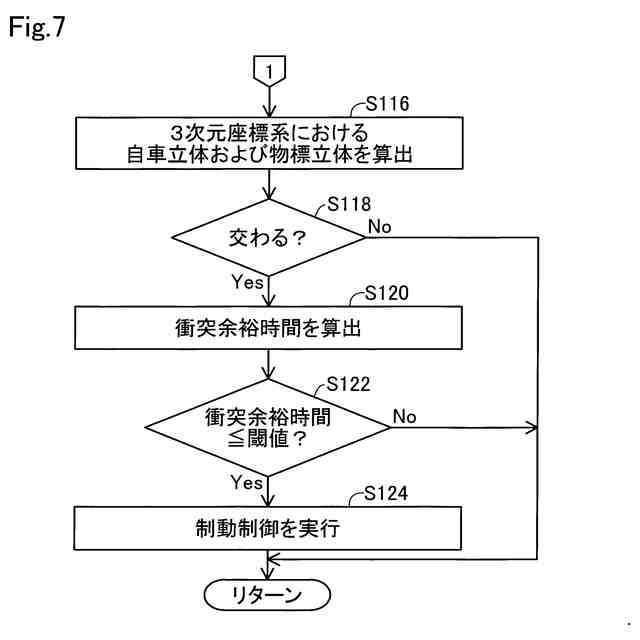
現在位置からの前記車両の進行方向に沿った距離および前記車両の車幅方向に沿った距離と、現在からの経過時間とにより規定される3次元座標系において、推定された前記走行経路における予め定められた時間間隔ごとの自車存在領域(EA1)の推移を示す立体である自車立体(D1)を算出する自車情報算出部と、
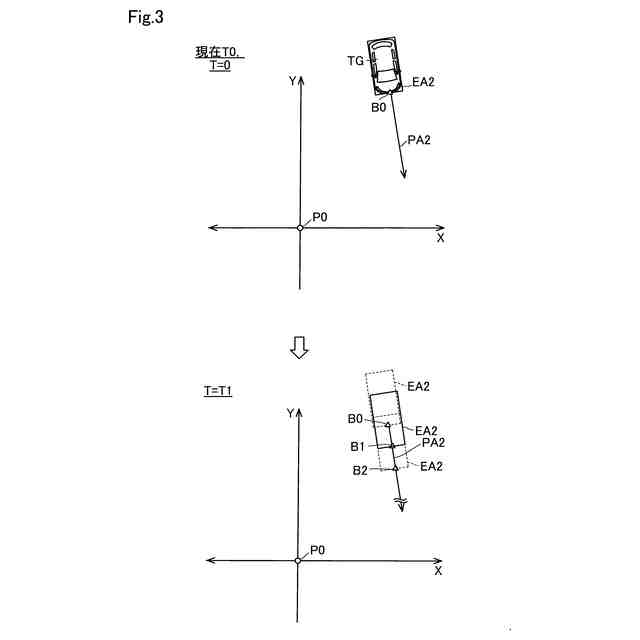
前記物標検出装置により検出された前記物標の位置に基づいて、前記3次元座標系における前記物標の移動経路(PA2)を推定する物標経路推定部(241)と、
算出された前記自車立体と、算出された前記物標の移動経路との交わりの有無に応じて、前記車両に対する前記物標の衝突の有無を判定する衝突判定部(250)と、
を備える、
衝突判定装置。
発明の詳細な説明
【技術分野】
【0001】
本開示は、経路推定装置および衝突判定装置に関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
従来、予測される自車の移動経路および自車の周囲の物標の移動経路から、自車と物標との衝突の可能性の有無を判定し、衝突の可能性がある場合、制動動作を実行して自車を減速させることで衝突の可能性を抑制する技術が知られている(特許文献1)。
【先行技術文献】
【特許文献】
【0003】
特開2021-172144号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に記載の自車の移動経路の推定では、ヨーレートセンサにより検出された自車のヨーレートが利用されている。検出されたヨーレートには、自車の旋回動作に起因する公転成分のヨーレートと、自車のヨー回転運動に起因する自転成分が含まれる。しかしながら、四輪操舵車両においては後輪の操舵制御も行われるため、二輪操舵車両と比較して、検出されたヨーレートにおいて自転成分のヨーレートの影響が強く表れる。このため、四輪操舵車両において、検出されたヨーレートをそのまま利用して自車の移動経路を推定すると、移動経路の推定精度が低下するという問題がある。かかる問題は、衝突判定のための移動経路予測に限らず、車両制御のための種々の移動経路予測においても共通する。
【課題を解決するための手段】
【0005】
本開示は、以下の形態として実現することが可能である。
【0006】
本開示の一形態によれば、四輪操舵車両として構成された車両(VM)の走行経路(PA1)を推定する経路推定装置(210)が提供される。この制御装置は、前記車両が有する後輪の操舵角に関する情報である後輪操舵情報を取得する取得部(212)と、前記後輪操舵情報を利用して特定された前記後輪の操舵角の時間変化率を利用して、前記走行経路を推定する自車経路推定部(213)と、を備える。
【0007】
この形態の制御装置によれば、四輪操舵車両として構成された車両が有する後輪の操舵角の時間変化率を利用して走行経路を推定するので、経路推定における後輪の操舵角の時間変化率、すなわち自転成分のヨーレートの影響を抑制でき、走行経路の推定精度の低下を抑制できる。
【図面の簡単な説明】
【0008】
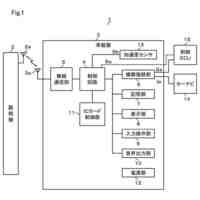
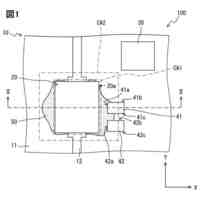
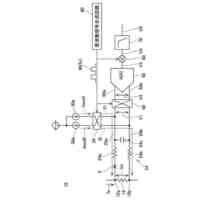
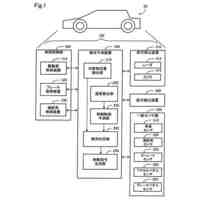
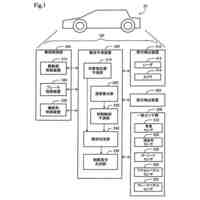
本実施形態の車両制御システムの概略構成を示す説明図である。
2次元座標系のXY平面上での自車存在領域の説明図である。
2次元座標系のXY平面上での物標存在領域の説明図である。
3次元座標系における自車立体および物標立体の説明図である。
自車立体と物標立体による自車と物標の衝突判定について示す説明図である。
本実施形態の衝突判定処理の手順を示す第1のフローチャートである。
本実施形態の衝突判定処理の手順を示す第2のフローチャートである。
【発明を実施するための形態】
【0009】
A.第1実施形態:
A-1.システム構成:
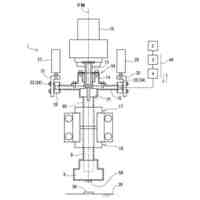
本実施形態の衝突判定装置200を備える車両制御システム10は、車両に適用される。車両制御システム10が適用される車両は、自動運転可能に構成されていてもよい。図1に示す車両制御システム10は、物標検出装置110および衝突判定装置200を備えている。
【0010】
物標検出装置110は、ミリ波を送信し、送信したミリ波が物標TGに反射することで生じる反射波から、自車周囲の物標の位置、および自車に対する物標の相対速度を検出する。物標検出装置110は、ミリ波レーダセンサ111と、レーダECU112とを備えている。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社デンソー
車載器
11日前
株式会社デンソー
ステータ
11日前
株式会社デンソーエレクトロニクス
発音装置
15日前
株式会社デンソー
電子装置
6日前
株式会社デンソー
反力装置
5日前
株式会社デンソー
ねじ部材
11日前
株式会社デンソー
電子装置
5日前
株式会社デンソー
ステータ
11日前
株式会社デンソー
電子装置
15日前
株式会社デンソーテン
インバータ
5日前
株式会社デンソー
レーダ装置
15日前
株式会社デンソー
農業用装置
7日前
株式会社デンソー
レーダ装置
4日前
株式会社デンソー
半導体装置
11日前
株式会社デンソー
通信システム
15日前
株式会社デンソー
電圧検出回路
7日前
株式会社デンソー
車載システム
5日前
株式会社デンソーエアクール
換気空調装置
12日前
株式会社デンソー
車両制御装置
5日前
株式会社デンソー
電気化学セル
15日前
株式会社デンソー
車載システム
5日前
株式会社デンソー
電力変換装置
7日前
株式会社デンソーテン
車載映像装置
11日前
株式会社デンソー
電力変換装置
11日前
株式会社デンソー
衝突予測装置
6日前
株式会社デンソー
ステータコア
18日前
株式会社デンソー
運転支援装置
6日前
株式会社デンソー
制御システム
18日前
株式会社デンソー
衝突予測装置
6日前
株式会社デンソー
運航管理装置
4日前
株式会社デンソー
電子制御装置
11日前
株式会社デンソー
電波吸収装置
15日前
株式会社デンソー
フィルタ回路
19日前
株式会社デンソー
電力変換装置
19日前
株式会社デンソー
電子制御装置
15日前
株式会社デンソー
圧着ヘッド装置
11日前
続きを見る
他の特許を見る






 特許ウォッチ
特許ウォッチ